1 引言
开关型磁阻(SR)电机调速系统(SRD)结构简单、坚固、成本低,调速性能优良,在宽广的调速范围内均具有较高的效率,应用前景十分广阔。但由于SR电机的双凸极结构和采用开关性的供电电源,振动、噪声是其突出的问题,这已成为SRD在更多范围内推广应用发挥其特长的主要障碍。过去人们对SRD的研究主要集中在SR电机本体设计、功率变换器及速度控制策略研究上,因为研究难度大,目前,只有少量文献论及SR电机振动、噪声研究[1~5]。
文[1]基于时域分析,得出结论:SR电机相绕组关断所激发的冲击振动是最主要的振动、噪声来源。为削弱这一振动,文[1]提出将相电流关断过程分成两步的“两步换相法”(参见图1):第一步仅关断K1,相电压Up由+Us负跃变至0 V;第二步再关断K2,这时Up由0 V负跃变到-Us。控制第二步与第一步时间间隔为定子固有频率对应周期的一半,这样,第二步与第一步产生的冲击振动相位差为180°,因而相互抵消。WUC.Y.等率先将“两步换相法”引入SRD系统设计,在CCC方式和APC方式两种工况下取得良好抑制振动、噪声效果[1],但其采用不对称半桥主电路,四相(8/6)SR电机需要8只主开关器件和8只续流二极管,未能充分体现单极性的SR电机功率变换器结构简单、开关器件少的优势,影响了系统的经济性。
本文采用一种新型的只有6只主开关器件的四相率变换器[6],在以8098单片机为控制核心的SRD设计中,引入两步换相控制策略,在电压PWM和APC两种工况下,显著地抑制了SR电机的振动和噪声。

2 系统描述
为实现多数传动装置需要的转矩/转速特性:从静止到基速具有恒转矩,在基速以上具有恒功率特性,系统采取的控制策略为基速ωb以下,电压PWM控制,输出恒转矩特性;基速ωb以上,角度位置控制(APC),输出恒功率特性。为简化控制规律,采取将关断角θoff固定在一个由实验得到的最优角度22°处,仅调节起始开通角θon。
8098单片机定时采样由转子位置传感器获得的反馈速度,与由键盘敲入的给定速度比较,误差经数字PI调节,再经软件处理,根据反馈速度的大小是否在基速以上转换成PWM脉冲或控制角度的APC单脉冲的控制参数。微机控制器根据转子位置控制对应相绕组的导通或关断,输出对应的PWM脉冲或APC单脉冲,经功率变换器,实现对SR电机的控制。为简化硬件电路,PWM控制、APC脉冲控制、速度检测、PI调节器均由软件实现;为提高过流保护动作的快速性,采用硬件过流保护电路。
样机为0.75 k W四相(8/6)SR电机,功率变换器以GTR作为主开关器件,采用图2所示的功率主电路。

图2电路的拓扑结构由Pollock等率先提出[6],其基本上保留了不对称半桥线路的优点,所用开关器件又较不对称半桥少,具有较高的性能/价格比。
与常规SR电机直接数字控制系统(DDC)换相逻辑控制不同,既要满足SR电机电动运行换相要求,又要满足两步换相要求是制定6只主开关换相规则的原则,显然,这限制相绕组的最大导通角θc不得超过30°。
3 系统硬件设计
3.1 微机控制器硬件框图
以8098单片机为核心的微机控制器硬件框图如图3所示。
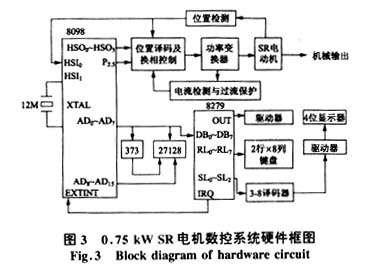
由图3可见,控制器主要由8098单片机,外接EPROM27128、专用键盘显示器接口芯片8279、位置译码及换相控制电路、电流检测与过流保护电路组成。由于基速以下采用的是电压PWM方式,为防止GTR因过流而损坏,设计了过流保护电路。对四相SR电机,其交叉相(即A、C相和B、D相)的导通区间一般不会重叠,因此可采取A相和C相、B相和D相分别共用一个电流传感器(LEM模块),对四相电流检测,如图2所示。
两路转子位置信号分别送8098的高速输入口HSI0和HSI1,HSI中断服务程序与高速输出HSO0~HSO3和位置译码及换相控制电路配合,用于控制6只主开关的导通、关断,实现SR电机电动运行的换相要求及两步换相要求,HSI中断服务程序还用于速度的采样。
3.2 位置译码及换相控制电路设计
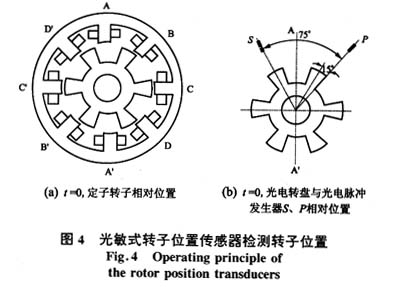
图2中K1、K3、K4、K6均作为第一步换相开关,与两绕组相连的公共开关K2、K5则作为第二步换相开关。位置检测采用如图4所示的光敏式转子位置传感器半数检测方案。转盘的齿、槽数与转子的凸极、凹槽数一样,均为6,且均匀分布,所占角度均为30°,转盘安装在转子轴上并同步旋转,图中S、P为光电脉冲发生器,当转盘凸齿转到开槽的S、P位置时,发光管被遮住而使其输出状态为0,没有被遮住时,其输出状态为1,则在一个转子角周期(60°)内,S、P产生2个相位差为15°,占空比为50%的方波信号,其组合成4种不同的状态,分别对应四相绕组不同的参考位置。设θc对应的时间为tc,两步换相的时间间隔为tm,则APC方式下SR电机逆时针换相规则(正转换相规则)为:
(1)若S=0,且P由0跃变到1,则K1、K2同时导通,且分别经tc、tc+tm后关断;
(2)若P=1,且S由0跃变到1,则K4、K5同时导通,且分别经tc、tc+tm后关断;
(3)若S=1,且P由1跃变到0,则K3、K2同时导通,且分别经tc、tc+tm后关断;
(4)若P=0,且S由1跃变到0,则K6、K5同时导通,且分别经tc、tc+tm后关断。
顺时针转动的换相规则(反转换相规则)为:
(1)若S=0,且P由1跃变到0,则K1、K2同时导通,且分别经tc、tc+tm后关断;
(2)若P=0,且S由0跃变到1,则K6、K5同时导通,且分别经tc、tc+tm后关断;
(3)若S=1,且P由0跃变到1,则K3、K2同时导通,且分别经tc、tc+tm后关断;
(4)若P=1,且S由1跃变到0,则K4、K5同时导通,且分别经tc、tc+tm后关断。
笔者利用8098硬件资源(HSI口、HSO口及P2.5)及少量外接的数字逻辑电路设计了实现上述换相控制的硬件电路。其中,HSO1、HSO3分别产生K2、K5的换相控制信号;HSO2、HSO0产生K1、K3、K4、K6的换相控制信号,因为采用外接逻辑电路构成了30°导通制的换相逻辑控制,因此A相(K1)、C相(K3)可共用HSO0,B相(K4)、D相(K6)可共用HSO2。8098片内的脉冲宽度调制器提供的PWM信号频率固定为15.625kHz,这一斩波频率对GTR而言偏高,故不采用片内的PWM方式,将P2.5作为普通输出口,由软件定时器T1、T2中断形成定频调宽的PWM脉冲,和HSO2、HSO0及外接逻辑电路一起为工作在PWM方式下K1、K3、K4、K6提供换相控制信号;若为APC方式,则将P2.5置0。由于两步换相限制了θc不得超过30°,这降低了起动性能,为此在起动阶段不采用两步换相法,而采用两相全开通起动方式,待起动过程结束后,再切换到二步换相法。
4 软件设计
系统软件由主程序、中断服务程序、专用子程序组成。主程序初始化整个系统和将显示缓冲区的4位速度值送8279显示RAM;中断服务程序包括软件定时器T0、T1、T2中断服务程序、HSI中断服务程序、键盘中断服务程序。其中软件定时器T0中断服务程序完成速度环PI调节与控制参数、显示速度刷新;软件定时器T1、T2完成速度采样和电压PWM控制信号的生成;HSI中断服务程序在换相控制电路支持下实现如上所述的换相规则;键盘中断服务程序首先读取按下的键值,然后根据按下的键跳转到对应的功能模块控制系统程序的执行。专用子程序主要是四字节浮点运算子程序、十六进制数转换成BCD码子程序等。
主程序初始化系统时,将HSI方式设置为每次跳变触发,因此电机每转过一个步进角,HSI中断服务程序将被执行一次,其主要是通过测试HSI0(即S信号)和HSI1(即P信号)当前的状态给HSO-COMMAND寄存器装载相应的命令字和给HSO-TIME寄存器装载触发时间值使HSO0~HSO3产生所要求的输出信号。HSI中断服务程序在实现换相控制规则的同时,还实现了APC方式下的控制。为简化设计,采用将θoff固定在经实验获得的优化角22°处,而在速度环中调节θon。
转速测量通过在采样周期内记录HSI事件触发的次数———转过的步进角(15°)数目N实现。
速度环程序在起动阶段每隔120 ms被调用一次;起动后若运行在基速以下每隔30 ms被调用一次,若运行在基速以上每隔12 ms被调用一次。速度环首先计算实际转速,然后判断电机是否已经起动。将电机转速低于50 r/min作为起动阶段,在起动阶段速度偏差不作PI调节运算,而是采取软件定时器T1中断服务程序中逐步加大斩波占空比的方法实现软起动功能。电机起动后,速度环每调用一次,都要进行一次速度偏差PI运算,然后刷新控制参数。
5 系统运行实验
以给电阻箱(ZB-120型)供电的直流发电机(Z2-31型,3 k W,3 000 r/min)作负载,对0.75 k W SRD系统负载运行的振动、噪声作了测试。图5为采用电压PWM方式,电机运行在547 r/min在机座表面所测振加速度波形,图6为APC方式下电机运行在1 433 r/min所测振动加速度波形图。

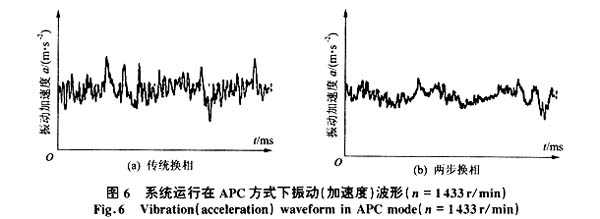
表1为测量距离取0.4 m左右,电机负载运行在不同速度下,声级计滤波网络采用A计权网络测得的总声级分贝(A)对比。
图5、6表明系统引入两步换相法对SR电机定子振动有显著的抑制效果;表1表明两步换相法对噪声有明显抑制作用,虽然限于条件,背景噪声较大,测量的精确性不高,但从噪声的对比测试看,在有些工况下,两步换相法的总声级较传统换相法低3 dB(A)左右,相当于声功率降低了1倍左右,效果是显然的。
参考文献:
[1] Wu CY,et al.Analysis and reduction of vibration and acoustic?
noisein the switched reluctance drive[J].IEEETrans on IA,1995,31(1):91-98.
[2] Cameron DE,etal.Theorigin and reduction of acoustil noiseindoubly salientvariable reluctance motors[J].IEEETrans on IA,1992,28(6):1250-1255
[3] Blaabjerg F,et al.Investigation and reduction of acoustical noise form switched reluctanec drives in current and voltage control [C].Proc.ICEM'94,1994.
?[4]?? 刘迪吉,曹志亮(Liu Diji,Cao Zhiliang).开关磁阻电动机振动噪声研究(Research on vibration and acoustic noise in switched reluctanec drines)[J].江苏机械制造与自动化(Jiangsu Machine Building&Automation),1990,(3):33-34.
[5] 王宏华,陈永校,许大中,等(Wang Honghua,Chen Yongxiao,XuDazhong,et al).开关磁阻调速电机定子振动抑制(Thereduction ofvibrationintheswitched reluctance drive)[J].电工技术学报(TransactionsofChina ElectrotechnicalSociety),1998, 13(3):9-12.
[6] Pollock C,et al.Power convertercircuitsforswitched reluctance motor with the minimum number of switches[J].IEE Proc,
1990,137(6):373-384.
上一篇:VxWorks体系下PowerPC860处理器串行总线设计
下一篇:MAX791在看门狗电路中的应用
推荐阅读最新更新时间:2024-05-13 18:16

 ICCV2023论文汇总:Efficient and Scalable Vision(高效和可扩展视觉)
ICCV2023论文汇总:Efficient and Scalable Vision(高效和可扩展视觉) 汽车电源系统的分析及仿真
汽车电源系统的分析及仿真 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号{kind=link}