电子控制系统一般都是实时系统,常需处理许多并发事件的输入数据流。这些事件的到来次序和几率通常是不可预测的,而且还要求系统必须在事先设定好的时限内做出相应的响应[1]。对于如何控制系统的复杂行为,普遍采用的是事件触发方案,即系统的所有行为响应系统外部事件而执行。然而,中断丢失与事件触发系统的开销是人们经常忽略的一个问题,文献[2]讨论了一个这样的例子:一个包含27个任务、采用RM调度算法的事件触发系统,CPU的实际利用率仅为18%。同时,电子控制系统也可以看作是一个能实时采集一组定义好的输入值,同时在预先确定的时间间隔给出一个正确输出的实时系统。为了满足安全、低成本及程序尽可能简单等苛刻要求,电子控制系统的开发最终走向时间触发结构[1]。时间触发意味着所有的与输入采样、计算及输出结果等相关的动作在预先给定的时间前执行,因而能保证准确的调度时间。
1 时间触发系统的任务调度器
调度器是一种用于电子控制系统的运行环境,也可看作是一个简单的操作系统。在电子控制系统中使用调度器可以缩短开发时间,提高软件的模块化程度。调度器具有合作式与抢占式两种形式。如果一个被"唤醒"的高优先级任务可以打断其他正在运行的低优先级任务,则调度器是抢占式的;反之,则是合作式的。由于其应用背景的特殊性,电子控制系统运行的任务绝大多数是周期性任务(如周期性的数据采集任务、LED显示刷新任务等),并且任务的就绪时间、开始时间、执行时间和截止期限等信息均可预先知道。因此,可以采用基于时间触发形式的合作式调度器,即任务在特定时刻以周期性或单次方式被调度。
2 时间触发合作式调度器的机制
时间触发合作式调度器通常通过一个硬件定时器来实现,所有的任务都是由时间触发的,这也意味着除了定时器中断以外,再也没有其他形式的中断。硬件定时器将被设置为产生一个周期中断信号,这个中断信号的频率约为1kHz。
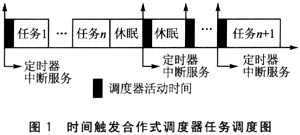
时间触发合作式调度器的主要功能就是唤醒在预先确定好时间执行的任务。在工作时间,调度器检查静态的任务链表,根据任务的周期判断是否有任务需执行,如果有则立即执行任务;任务执行完后继续检查任务链表,重复上一个过程。完成链表检查后,由于节能的关系,CPU进入休眠状态,直到下一个时钟节拍的到来。其任务调度机制如图1所示。由于合作式调度器能保证在同一时刻,系统中只有一个任务被触发,而且在任何时刻系统中都可以保证有任务在执行。这样,系统的使用效率得到了提高。在分布式系统中,各个节点间存在着时间的漂移(由于每个节点所处的环境以及时钟晶振的制作工艺等存在差异),所以必须动态地对节点时钟进行调整,使整个系统的各个节点时钟能够同步。
合作式调度器可靠而且可预测的主要原因是在任一时刻只有一个任务是活动的,这个任务运行直到完成,然后再由调度器来控制。如果抢占式调度,有多个活动任务,执行"上下文切换"及"关键段保护"等将增加系统的开销。图2[3]比较了使用合作式调度器与抢占式调度器设计巡航系统的情况。可以看到,采用合作式调度模式可以精简所需的代码行数,节省程序存储器和数据存储器空间。同时,许多研究表明,相对于抢占式调度器,除任务级的响应时间快很多外,合作式调度器还具有很多优点。例如,文献[4]指出与抢占式替代方案相比,合作式调度有以下四个优点:简单,可减小系统开销,容易测试以及更容易让权威机构接受这种形式的调度。

3 应用实例
太阳跟踪系统是针对太阳能空调、高效太阳能光伏发电、高效太阳能热水器等需要对太阳进行实时跟踪的应用领域设计的,通过使设备的某一面时刻与太阳光保持垂直,获取最大的太阳能量。
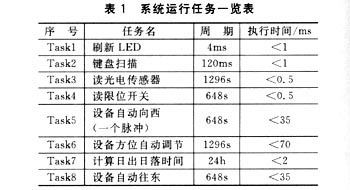
本文涉及的跟踪系统采用传感器跟踪与天文定位跟踪相结合的模式。即通过当地的经纬度与当前日期计算日出、日落时间,然后根据日落、日出的时间差及电机的步距角,每隔一段时间输出一个脉冲控制设备自动往西。同时,根据光电传感器输入,每隔一段时间控制电机在东、西、南、北四个方向自动调节设备,使设备与太阳光保持垂直。图3给出了太阳跟踪器上下文环境图,给出了系统与传感器和执行器接口的简单描述。由图3可知实现系统功能所需的任务、任务周期及执行时间如表1所列。

在表1所列的任务中,Task2每120 ms执行一次键盘扫描,用于设置当前时间、经纬度及保存手动调节设备的输入。Task6根据手动调节设备输入及光电传感器的输入调节设备方位。Task7计算日出日落时间,每24小时执行一次。Task3、Task4、Task5与Task6,采用swith_case结构,不在运行时间范围内,程序直接跳出,否则运行相应的任务,Task8在到达日落时间或设备触及西方向限位器时起作用,控制电机使设备对准太阳升起位置。
根据合作式调度器的原理与各任务的周期,设置定时器每4 ms产生一个周期中断信号。因为有多个任务的执行时间超过4 ms,Task1无法按规定的频率执行。此外,有多个任务的 最坏执行时间超过30 ms,使键盘扫描的灵敏度受到影响。因此采用直接将Task1、Task2包含进定时器中断服务子程序的方法,从而使所有任务的周期及执行时间均能满足系统任务可调度的要求。
结 语
在工程中采用事件触发模式很大程度上会增加系统的复杂性,导致庞大的代码结构。这样的代码长度及复杂性不适合普通开发人员构建,而商业实时操作系统往往价格昂贵,并且需要很大的操作系统开销。采用基于时间触发模式开发系统可以满足实时、简单、可预测性等工程要求。在应用实例中也可以看到,对于任务周期与执行时间相差悬殊的任务,为满足可调度性的要求,将需频繁执行的短任务加入定时器中断服务子程序的方法延长了中断处理的时间,同时削弱了系统实时响应能力及可预测能力。此外,也可以通过将执行时间长的任务分解成几个执行时间短的任务来满足任务可调度性。相对于事件触发模式,时间触发模式对工程技术人员的要求更高。
上一篇:多任务系统看门狗的实现
下一篇:基于ARM处理器的MVB 2类设备研究
推荐阅读最新更新时间:2024-05-13 18:38

 ICCV2023论文汇总:Efficient and Scalable Vision(高效和可扩展视觉)
ICCV2023论文汇总:Efficient and Scalable Vision(高效和可扩展视觉) 电力工程设计手册 07 循环流化床锅炉附属系统设计
电力工程设计手册 07 循环流化床锅炉附属系统设计 硬件架构艺术:数字电路的设计方法与技术
硬件架构艺术:数字电路的设计方法与技术






- 【EE征集令】LaunchPad学习全体验
- Mouser 新用户大礼包:你购物,我5折返E金币!
- ADI有奖下载活动之13升级版ADI电机控制解决方案—伺服控制
- EEWORLD大学堂3月精彩视频&课程快报
- 全球首款Cortex-M23内核物联网芯片SAML10和SAM L11系列 闯关获取SAML10/SAML11法宝,拆除电子界安全危机,赢好礼!
- ST有奖直播:智能功率开关在工业自动化行业的应用
- 有奖直播|无线技术改变智能生活
- TI 图形化界面助力快速开发,这就是您想要的MSP430™通用MCU!
- “TI 中国大学计划” 知多少——答题赢好礼!
- 是德科技有奖直播:如何使用UXR系列高端示波器




 京公网安备 11010802033920号
京公网安备 11010802033920号