近年来,DSP运算能力的不断增强,使其在电子设备方面得到了广泛的应用。DSP/BIOS是TI公司推出的一个实时操作系统,与TI的CCS(Code Composer Studio)集成在一起。用DSP/BIOS可以大大简化DSP应用程序的开发和调试,其中与外围设备的I/O接口是DSP应用开发中不可缺少的重要部分。TI公司为C64x系列DSP的开发者提供了一种类/微驱动模型(class/mini drivermodel)。通过对外围设备设计驱动程序,为高层应用程序提供统一的接口来操作底层硬件。只要是遵循此驱动程序接口标准开发的高层应用程序,都可以在具有相同接口的不同硬件平台上运行,从而使DSP软件系统与硬件系统相分离,提高了软件的可重用性、可维护性和可移植性,缩短了总体驱动程序的开发周期。
1 DSP的外设驱动开发模型
TI公司为开发DSP的外设驱动程序定义了标准的设备驱动模型,并将设备驱动分为类驱动和微驱动,即依赖于硬件层和不依赖于硬件层。两层之间使用通用接口进行数据通信,并提供了一系列的API接口,用户应用程序通过调用API来访问相应的外部设备。外设驱动开发模型的建立,提高了外设驱动程序的可重用性和模块化程度,简化了驱动程序的开发。外设开发模型如图1所示。

① 类驱动(class driver)。类驱动程序用来为应用程序提供接口。这部分程序与所使用的硬件设备无关,主要功能包括维护设备缓冲区,向上提供API接口供应用程序调用,向下提供适配层与微驱动层相连,实现API接口函数到微驱动层程序的映射。
② 微驱动(mini driver)。微驱动程序与外部硬件设备相关,所以设计微驱动程序是外设驱动开发的重点。微驱动程序与类驱动程序的接口格式是固定的,但微驱动程序对底层硬件的操作则须根据硬件平台的不同需要做相应的改动。微驱动通过接收类驱动层发出的调用命令来决定对底层硬件进行什么样的操作。
类驱动通过标准的微驱动接口调用微驱动控制硬件设备。到目前为止,TI共定义了3类驱动:①流输入输出模块(SIO),为每个DSP/BIOS线程提供一个独立的I/O机制,执行点到点的数据传送,支持动态创建,通过DIO适配模块与IOM连接;②管道管理模块(PIP),提供管理异步I/O的数据管道,每个管道对象都有一块同样大小的缓存,PIP模块通过缓存进行数据传输,通过PIO适配模块与IOM通信;③通用输入输出模块(GIO),基于流输入/输出模式的同步I/O,适合大流量数据的传输,更适合文件系统。在用户应用程序中可直接调用GIO的API函数,GIO不需要额外的适配模块,可直接与IOM进行交互。GIO的这些优点使得通过GIO模块与外部设备进行数据流传输,操作简单、稳定,所以在视频采集的类驱动中采用了通用输入输出模块GIO。
GIO模块实现GIO的类驱动,用于提供一个模块化的读写应用程序接口到应用程序。通过封装这部分代码,应用程序可以通过GIO提供的应用程序接口间接调用各种IOM微驱动来减小整体的代码大小,如图2所示。

GIO模块提供下述功能:提供模块化的读写应用程序;用IOM接口与指定设备微驱动实现程序通信;支持多个设备驱动;支持双向通道;允许用户配置模块化功能;支持应用程序增加新的应用领域(如视频)。其中,最后一项功能很重要。GIO_submit函数对新增加的用户定制的应用程序接口(API)提供标准通道(如video)。这种用户定制的类型包括用于文件系统的读写应用程序接口模块,例如UART、DSP视频帧等的应用。
传统的文件系统用读写应用程序接口来完成应用程序与文件之间的数据传输,需要由GIO类驱动和IOM微驱动来完成所需的双向通道。对GIO接口模块的扩展可以更加友好和高效地实现视频抓取和视频显示。这种扩展特别满足了视频设备存储空间(例如指定的帧缓存)的分配,而且通过简单的应用程序调用来更新视频帧缓存,提供视频驱动与应用程序之间最新的视频数据的更新。GIO类驱动具有如下接口,在函数表中指定设备的操作模式:
微驱动IOM通常包括如下函数:通道绑定函数(mdBindDev),通道创建函数(mdCreateChan),通道删除函数(mdDeleteChan),I/O请求发送函数(mdSubitChan),通道解绑定函数(mdUnBindDev)和设备控制函数(mdControlChan)。类驱动通过调用这些底层函数完成相应外部设备与应用程序之间的数据传送通道的创建,以及外部设备和内存空间的分配,控制各个线程之间数据传送的同步等。这些规定好的底层函数将放入微驱动的函数接口表(IOM——Fxns)中的相应位置,供应用程序通过适配模块或直接由GIO类驱动调用。IOM接口表的结构如下:
在调用IOM微驱动之前,必须要先在DSP/BIOSConfig中注册。在Device Drivers中右击选择插入一个设备驱动,命名为VPlACAPTURE,并进行各个属性(如函数表指针、函数表类型和设备ID号等)的配置,指明IOM_Fxns函数表地址和设备参数地址,如图3所示。
2 DM642芯片视频驱动程序设计
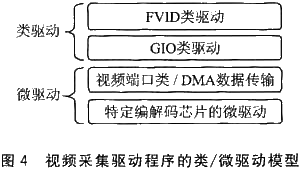
视频驱动程序的设计主要包括微驱动、类驱动和中间接口3方面的设计。为了最大程度的提高视频驱动代码的复用性和通用性,在视频采集驱动程序实例中,在GIO类驱动程序基础上进一步封装成FVID类。将微驱动细分为视频端口类和指定的编解码芯片微驱动,二者之间通过外部设备控制接口(EDC)实现对外围芯片的打开、控制和关闭等操作。这样一来,即使所使用的板长上集成了不同的视频编解码芯片,也只需改变特定编解码芯片的微驱动。视频采集驱动程序的类/微驱动模型如图4所示。
例如,对VPORT_PortParams接口的说明属于对VPORT端口类的说明,而对SAA7121接口的说明则属于对特定编码芯片的说明。如果把VPORT类用于不同的芯片,则只需对SAA712l进行修改。对EDC的接口说明如下(指定要对外围设备进行打开、关闭等的操作):
下面举例说明对FVID类驱动的视频应用程序接口(video API)的操作。就应用程序而言,对设备驱动程序的操作可分为3个阶段:创建、处理和删除。创建是在应用程序与外部设备之间建立一个数据输入/输出的逻辑通道,对应于FVID_create;处理是在应用程序与外部设备之间进行数据的传送,并对外设进行相应的控制,对应于FVID_control和FVID_alloc;外设使用完毕后,相应地删除原先所建立的通道,对应于FVTD_delete。具体的调用函数如下:

结 语
本文介绍了TI公司开发的类/微驱动模型和改进后DM642的视频类/微驱动模型。实践表明,DM642的视频类/微驱动模型降低了系统中软硬件之间的耦合性,提高了驱动程序的可重用性和可移植性,简化了视频驱动程序的开发。
上一篇:TMS320C6000系列DSP的Flash启动设计
下一篇:TMS320F24x与PC机串行通信接口设计及应用
推荐阅读最新更新时间:2024-05-13 18:36

- 热门资源推荐
- 热门放大器推荐
-
 ICCV2023论文汇总:First Person (Egocentric) Vision 第一人称视觉(自我中心视觉)
ICCV2023论文汇总:First Person (Egocentric) Vision 第一人称视觉(自我中心视觉) - ICCV2023论文汇总:Embodied Vision: Active Agents, Simulation(具身视觉:主动代理、模拟)
- ICCV2023论文汇总:Efficient and Scalable Vision(高效和可扩展视觉)
-
 BMS电池管理系统调试指导手册
BMS电池管理系统调试指导手册 -
 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练 - 东芝1200V SIC SBD “TRSxxx120Hx系列” 助力工业电源设备高效
- 一起来学Cadence Allegro高速PCB设计
- 5G+MEC+V2X车联网解决方案白皮书
 ICCV2023论文汇总:First Person (Egocentric) Vision 第一人称视觉(自我中心视觉)
ICCV2023论文汇总:First Person (Egocentric) Vision 第一人称视觉(自我中心视觉) BMS电池管理系统调试指导手册
BMS电池管理系统调试指导手册 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练










 京公网安备 11010802033920号
京公网安备 11010802033920号