摘要:基于软判决译码规则,采用完全并行的解码结构,使用Verilog硬件描述语言,在Xilinx公司的FPGA(Virtex-2 xcv1000)上实现了码率为1/2、帧长为20bit的规则(3,6)LDPC码的译码器,最大传输速率可达20Mbps。对LDPC码的实际应用具有重要的推动作用。
关键词:LDPC码 变量节点 校验检点 因子图 译码
在通信系统中纠错码被用来提高信道传输的可靠性和功率利用率,低密度奇偶校验码(LDPC码)是目前最逼近香农限的一类纠错码。1962年,Gallager首次提出了LDPC码的古典模型,即规则(regular)的LDPC码:(n,j,k),校验矩阵H具有恒定的列重量和行重量。LDPC码由于比Turbo码列接近香农限的误码率性能和完全并行的迭代译码算法使其比Turbo码在部分场合具有更广泛的应用前景,从而使LDPC码成为当前纠错编码的一个研究热点。基于良好的译码性能,LDPC码被认为是通信系统的下一代纠错码。
 1 规则LDPC码
1.1 因子图描述
因子图有两类顶点,分别为变量节点(variable nodes,用空的圆点表示)和校验节点(check nodes,用方框表示)。Tanner图就是这两类顶点之间的二部图,即每条边的一端与变量节点相连,另一端与校验节点相连。变量节点代表实际的变量,校验节点代表这些变量节点之间的约束。对于(j,k)-LDPC码的每个变量(bit)都受j个校验(check)的结束,因此每个变量节点应该连接j个校验节点。每个校验方程有k个变量,因此每个校验节点应与k个变量节点相连。由于LDPC是一种线性码,使得它的因子图一边为变量节点,一边为校验节点,故LDPC码的因子图表示有专用的定义:二部图(bipartite graphs)。
图1表示了校验矩阵为H的规则(3,6)LDPC的因子图,它是由10个变量定点和5个校验定点组成的二部图,边刚好对应于矩阵中1的位置,这种因子图是LDPC迭代译码算法的基础。
1.2 LDPC码的译码算法
LDPC码的译码采用信度传播(belief-propagation或BP)算法,它与因子图相对应,如图1所示,利用BP算法获得好的译码性能,LDPC码的因子图中环的长度必须尽可能地长,长度为4的环会降低BP算法的性能,H矩阵设计时应避免出现。如果直接使用BP算法,由于在迭代过程中存在大量的乘运算,将使硬件的复杂度大幅度上升,本论文采用改进的Log-BP算法,把大量的乘运算转换成加运算,从而降低硬件复杂主生产成本。
首先定义可能用到的几个变量及符号的意义:H表示一个M%26;#215;N的LDPC校验矩阵,Hi,j表示矩阵H中第i行第j列的表示。定义校验节点m上的第n个变量节点为N(m)={n:Hm,n=1},并联在变量节点n上的第m个数验节点为M(n)={m:Hmn=1}。定义校验节点m上关联的除了第n个变量节点以外的所有变量节点为N(M),变量节点n上关联的除了第m个校验节点外的所有校验节点为M(n)。
Log-BP算法的译码过程:
1 规则LDPC码
1.1 因子图描述
因子图有两类顶点,分别为变量节点(variable nodes,用空的圆点表示)和校验节点(check nodes,用方框表示)。Tanner图就是这两类顶点之间的二部图,即每条边的一端与变量节点相连,另一端与校验节点相连。变量节点代表实际的变量,校验节点代表这些变量节点之间的约束。对于(j,k)-LDPC码的每个变量(bit)都受j个校验(check)的结束,因此每个变量节点应该连接j个校验节点。每个校验方程有k个变量,因此每个校验节点应与k个变量节点相连。由于LDPC是一种线性码,使得它的因子图一边为变量节点,一边为校验节点,故LDPC码的因子图表示有专用的定义:二部图(bipartite graphs)。
图1表示了校验矩阵为H的规则(3,6)LDPC的因子图,它是由10个变量定点和5个校验定点组成的二部图,边刚好对应于矩阵中1的位置,这种因子图是LDPC迭代译码算法的基础。
1.2 LDPC码的译码算法
LDPC码的译码采用信度传播(belief-propagation或BP)算法,它与因子图相对应,如图1所示,利用BP算法获得好的译码性能,LDPC码的因子图中环的长度必须尽可能地长,长度为4的环会降低BP算法的性能,H矩阵设计时应避免出现。如果直接使用BP算法,由于在迭代过程中存在大量的乘运算,将使硬件的复杂度大幅度上升,本论文采用改进的Log-BP算法,把大量的乘运算转换成加运算,从而降低硬件复杂主生产成本。
首先定义可能用到的几个变量及符号的意义:H表示一个M%26;#215;N的LDPC校验矩阵,Hi,j表示矩阵H中第i行第j列的表示。定义校验节点m上的第n个变量节点为N(m)={n:Hm,n=1},并联在变量节点n上的第m个数验节点为M(n)={m:Hmn=1}。定义校验节点m上关联的除了第n个变量节点以外的所有变量节点为N(M),变量节点n上关联的除了第m个校验节点外的所有校验节点为M(n)。
Log-BP算法的译码过程:
 译码过程:
初始化:对于接收到的每个变量节点n计算初始信道信息,并对每个点计算初始信息
译码过程:
初始化:对于接收到的每个变量节点n计算初始信道信息,并对每个点计算初始信息
 迭代译码:
(1)校验点计算
迭代译码:
(1)校验点计算
 其中α=∑n" ∈N(m)|αm,n"|
(2)变量节点计算
其中α=∑n" ∈N(m)|αm,n"|
(2)变量节点计算
 对于每个变量节点n,在完成变量节点计算后,对log似然率λn进行更新:
对于每个变量节点n,在完成变量节点计算后,对log似然率λn进行更新:
 (3)判决条件
(a)如果λn>0,则x"N=0;返之如果λn≤0,则x"N=1;
(b)如果H%26;#183;x"=0,则迭代结束,否则跳到第2步迭代译码部分,直至校验成功或者达到最大迭代次数。
上面算法中的αm,n和βm,n都被换为外部信息,其中αm,n是从变量节点向校验节点传递的信息,βm,n是从变量节点向校验节点传递的信息。通过log-BP算法和BP算法的比较可以实现,log-BP算法中除了f(x)=log
(3)判决条件
(a)如果λn>0,则x"N=0;返之如果λn≤0,则x"N=1;
(b)如果H%26;#183;x"=0,则迭代结束,否则跳到第2步迭代译码部分,直至校验成功或者达到最大迭代次数。
上面算法中的αm,n和βm,n都被换为外部信息,其中αm,n是从变量节点向校验节点传递的信息,βm,n是从变量节点向校验节点传递的信息。通过log-BP算法和BP算法的比较可以实现,log-BP算法中除了f(x)=log
 运算,剩下的都是加法运算,从在则避免了BP算法中乘运算过多的弊病。在本文中函数f(x)利用FPGA中的查找表(Look-up Table,LUT)实现。
2 H矩阵的生成
Gallager提出的LDPC码的H矩阵必须满足以下两点:
(1) H矩阵的第一列有j个1,j>=3;
(2) H矩阵的第一行有k个1,k>j;
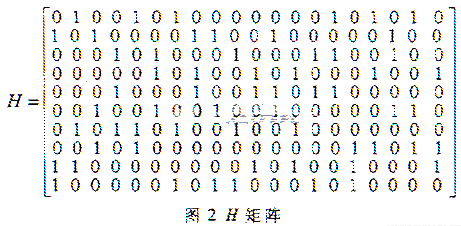
本文中选择j=3,k=6,通过编程用matalab软件生成若干满足条件的H矩阵,选择其中一个性能最好的H矩阵进行LDPC码的fpga译码实现。当n=20时,最终选择H矩阵如图2所示。
运算,剩下的都是加法运算,从在则避免了BP算法中乘运算过多的弊病。在本文中函数f(x)利用FPGA中的查找表(Look-up Table,LUT)实现。
2 H矩阵的生成
Gallager提出的LDPC码的H矩阵必须满足以下两点:
(1) H矩阵的第一列有j个1,j>=3;
(2) H矩阵的第一行有k个1,k>j;
本文中选择j=3,k=6,通过编程用matalab软件生成若干满足条件的H矩阵,选择其中一个性能最好的H矩阵进行LDPC码的fpga译码实现。当n=20时,最终选择H矩阵如图2所示。
 3 LDPC码完全平行译码结构
由二部图可能直接地看出,变量节点计算需要的信息只需由校验节点来提供,校验节点计算需要的信息只需要由变量节点来提供,译码器在设计时可以给每个变量节点分配一个变量节点处理单元(Variable Node processing Unit,VNU),给每个校验节点分配一个校验节点处理单元(Check Node processing Unit,CNU),从而实现译码器的完全并行结构。
译码器的核心模块是迭代译码部分,迭代译码的结构与算法是紧密相连的,译码结构的确定必须在仔细分析算法的基础上,迭代译码的过程是CNU和VNU模块计算结果的相互传递和更新。如果直接将CNU和VNU连接,不但不容易控制迭代的过程并且可能出现不稳定状态,所以需要在CNU和VNU之间安插RAM以起到数据的缓冲和控制作用。输入、输出模块分别控制数据的输入和输出,当条件满足或者迭代完成时,读入数据并把迭代结果输出。
3.1 迭代译码结构
图3表示平行迭代译码结构。其中只画出两个节点之间一条数据通路的连接方式,因为是完全平行迭代译码结构,其他节点之间数据通路的连接方式与此相同。信道初始化数据送入VNU模块进行数据处理后,送入RAM模块,数据经过CNU模块,最后再送入VNU模块,这样就完成一次迭代。数据信息从VNU到CNU与数据信息从CNU到VNU分别在不同的数据线上传输(图1)。
3 LDPC码完全平行译码结构
由二部图可能直接地看出,变量节点计算需要的信息只需由校验节点来提供,校验节点计算需要的信息只需要由变量节点来提供,译码器在设计时可以给每个变量节点分配一个变量节点处理单元(Variable Node processing Unit,VNU),给每个校验节点分配一个校验节点处理单元(Check Node processing Unit,CNU),从而实现译码器的完全并行结构。
译码器的核心模块是迭代译码部分,迭代译码的结构与算法是紧密相连的,译码结构的确定必须在仔细分析算法的基础上,迭代译码的过程是CNU和VNU模块计算结果的相互传递和更新。如果直接将CNU和VNU连接,不但不容易控制迭代的过程并且可能出现不稳定状态,所以需要在CNU和VNU之间安插RAM以起到数据的缓冲和控制作用。输入、输出模块分别控制数据的输入和输出,当条件满足或者迭代完成时,读入数据并把迭代结果输出。
3.1 迭代译码结构
图3表示平行迭代译码结构。其中只画出两个节点之间一条数据通路的连接方式,因为是完全平行迭代译码结构,其他节点之间数据通路的连接方式与此相同。信道初始化数据送入VNU模块进行数据处理后,送入RAM模块,数据经过CNU模块,最后再送入VNU模块,这样就完成一次迭代。数据信息从VNU到CNU与数据信息从CNU到VNU分别在不同的数据线上传输(图1)。
 3.2 变量节点结构(VNU)
变量节点的结构如图4所示。从中可以看出每个变量节点的度为3(j=3),四个5bit输入信息包含一个信道信息和三个与之相连的校验节点的信息。由log-BP算法可以看到α进行的是量化值的计算,没有牵扯到符号位,而ψm,n和λn的计算都有包含符号位的相加,实际上其中还包含了减法运算,而本文采用的符号信息位的格式不能用于减法运算,需要将其转换的其他格式。在本文进行和运算时,首先将转换为二进制补码形式,运算结束后再转换回符号量化位格式,查表(FX_LUT)进行f(x)运算。函数
3.2 变量节点结构(VNU)
变量节点的结构如图4所示。从中可以看出每个变量节点的度为3(j=3),四个5bit输入信息包含一个信道信息和三个与之相连的校验节点的信息。由log-BP算法可以看到α进行的是量化值的计算,没有牵扯到符号位,而ψm,n和λn的计算都有包含符号位的相加,实际上其中还包含了减法运算,而本文采用的符号信息位的格式不能用于减法运算,需要将其转换的其他格式。在本文进行和运算时,首先将转换为二进制补码形式,运算结束后再转换回符号量化位格式,查表(FX_LUT)进行f(x)运算。函数
 可由FPGA中的逻辑单元LUT来实现。Comb模块把1bit的判决结果x、4bit的查找表运算结果与符号位合在一起作为外部信息送入校验节点(CNU)。图4上半部分为输入译码的结果,下半部分为三个数据输出通道中的一个,其余两个的结构与此完全相同,唯一不同的是加法器的输入,根据log-BP算法,其中初始化数据经过S-to-T转换后的数据输入固定,另外两个输入数据为其他两个数据通道的输入经过S-to-T转换后的数据。
图4
3.3 校验节点结构(CNU)
校验节点(CNU)结构如图5所示,每个检验节点的度数为6(k=5),图5只画出数据的一个输出通道,其余5个输出通道的结构与此完全相同,加法器为检验节点首先对外部信息中的判决结果进行验证,看是否满足H%26;#183;x T=0,满足则结束迭代。CNU模块中f(x)的x计算是只计算量化值而不管正负的,而本译码器采用的符号量化位转化为二进制初码形式。
图5
3.4 数据输入与输出
完全平行译码结构可以分为三部分:迭代译码模块、数据输入模块和数据输出模块。因为是完全平行译码方式,输入数据经过串并转换后,同时读入VNU进行迭代计算。在数据输出模块,每一次迭代完成要进行条件判别,如果CNU所有的校验结果都为零,则输出数据。或者已经完成17次迭代,此时强制输出数据。数据的输入与输出分别用不同的时钟进行控制。图6为译码器其中一帧数据的测试结果,编码之前的信息为01010101,图6中OutData为编码后数据的输出。
可由FPGA中的逻辑单元LUT来实现。Comb模块把1bit的判决结果x、4bit的查找表运算结果与符号位合在一起作为外部信息送入校验节点(CNU)。图4上半部分为输入译码的结果,下半部分为三个数据输出通道中的一个,其余两个的结构与此完全相同,唯一不同的是加法器的输入,根据log-BP算法,其中初始化数据经过S-to-T转换后的数据输入固定,另外两个输入数据为其他两个数据通道的输入经过S-to-T转换后的数据。
图4
3.3 校验节点结构(CNU)
校验节点(CNU)结构如图5所示,每个检验节点的度数为6(k=5),图5只画出数据的一个输出通道,其余5个输出通道的结构与此完全相同,加法器为检验节点首先对外部信息中的判决结果进行验证,看是否满足H%26;#183;x T=0,满足则结束迭代。CNU模块中f(x)的x计算是只计算量化值而不管正负的,而本译码器采用的符号量化位转化为二进制初码形式。
图5
3.4 数据输入与输出
完全平行译码结构可以分为三部分:迭代译码模块、数据输入模块和数据输出模块。因为是完全平行译码方式,输入数据经过串并转换后,同时读入VNU进行迭代计算。在数据输出模块,每一次迭代完成要进行条件判别,如果CNU所有的校验结果都为零,则输出数据。或者已经完成17次迭代,此时强制输出数据。数据的输入与输出分别用不同的时钟进行控制。图6为译码器其中一帧数据的测试结果,编码之前的信息为01010101,图6中OutData为编码后数据的输出。
 4 FPGA实现
根据规则(3,6)LDPC的完全平行译码结构,选择在Xilinx Virtex2 XC2V1000-fg256上对其进行物理实现,译码器采用Verilog硬件描述语言编写,用Xilinx的开发工具ISE6.1在XC2V1000上对译码器进行布局布线。通过时序分析可以看出,译码器的最大时钟频率为20MHz,以输入时钟为基准,完成17次迭代最多需要20个时钟,完成一帧数据的输入需要20个时钟,可以得出译码器的最大译码速率为:V=20%26;#215;20/20=20Mbps。图7为帧长为20bit的LDPC码的译码性能,因为码长较短,性能没有达到最好。这为更高速LDPC码译码器的设计打下坚实的基础,码长为1024bit,传输速率可进一步提高,甚至达到1Gbps,译码性能会更好。
4 FPGA实现
根据规则(3,6)LDPC的完全平行译码结构,选择在Xilinx Virtex2 XC2V1000-fg256上对其进行物理实现,译码器采用Verilog硬件描述语言编写,用Xilinx的开发工具ISE6.1在XC2V1000上对译码器进行布局布线。通过时序分析可以看出,译码器的最大时钟频率为20MHz,以输入时钟为基准,完成17次迭代最多需要20个时钟,完成一帧数据的输入需要20个时钟,可以得出译码器的最大译码速率为:V=20%26;#215;20/20=20Mbps。图7为帧长为20bit的LDPC码的译码性能,因为码长较短,性能没有达到最好。这为更高速LDPC码译码器的设计打下坚实的基础,码长为1024bit,传输速率可进一步提高,甚至达到1Gbps,译码性能会更好。
 本文基于软判译码规则,采用完全平行译码结构,设计出帧长为20bit,码率为1/2的规则(3,6)LDPC码的译码器,在Xilinx virtex2 XC2V1000-fg256上对其进行物理实现,最大迭代次数为17次,传输速率达到20Mbps。DPC码具有良好译码性能,与Turbo码相比更易于硬件实现,并能得到更高的译码速度。下一步将设计出码长为1024bit或码长更长的LDPC译码器,进一步提高传输速率,降低误码率,为加速该技术在中国的商用奠定基础。
本文基于软判译码规则,采用完全平行译码结构,设计出帧长为20bit,码率为1/2的规则(3,6)LDPC码的译码器,在Xilinx virtex2 XC2V1000-fg256上对其进行物理实现,最大迭代次数为17次,传输速率达到20Mbps。DPC码具有良好译码性能,与Turbo码相比更易于硬件实现,并能得到更高的译码速度。下一步将设计出码长为1024bit或码长更长的LDPC译码器,进一步提高传输速率,降低误码率,为加速该技术在中国的商用奠定基础。
引用地址:基于FPGA的规则(3,6)LDPC码译码器
1 规则LDPC码
1.1 因子图描述
因子图有两类顶点,分别为变量节点(variable nodes,用空的圆点表示)和校验节点(check nodes,用方框表示)。Tanner图就是这两类顶点之间的二部图,即每条边的一端与变量节点相连,另一端与校验节点相连。变量节点代表实际的变量,校验节点代表这些变量节点之间的约束。对于(j,k)-LDPC码的每个变量(bit)都受j个校验(check)的结束,因此每个变量节点应该连接j个校验节点。每个校验方程有k个变量,因此每个校验节点应与k个变量节点相连。由于LDPC是一种线性码,使得它的因子图一边为变量节点,一边为校验节点,故LDPC码的因子图表示有专用的定义:二部图(bipartite graphs)。
图1表示了校验矩阵为H的规则(3,6)LDPC的因子图,它是由10个变量定点和5个校验定点组成的二部图,边刚好对应于矩阵中1的位置,这种因子图是LDPC迭代译码算法的基础。
1.2 LDPC码的译码算法
LDPC码的译码采用信度传播(belief-propagation或BP)算法,它与因子图相对应,如图1所示,利用BP算法获得好的译码性能,LDPC码的因子图中环的长度必须尽可能地长,长度为4的环会降低BP算法的性能,H矩阵设计时应避免出现。如果直接使用BP算法,由于在迭代过程中存在大量的乘运算,将使硬件的复杂度大幅度上升,本论文采用改进的Log-BP算法,把大量的乘运算转换成加运算,从而降低硬件复杂主生产成本。
首先定义可能用到的几个变量及符号的意义:H表示一个M%26;#215;N的LDPC校验矩阵,Hi,j表示矩阵H中第i行第j列的表示。定义校验节点m上的第n个变量节点为N(m)={n:Hm,n=1},并联在变量节点n上的第m个数验节点为M(n)={m:Hmn=1}。定义校验节点m上关联的除了第n个变量节点以外的所有变量节点为N(M),变量节点n上关联的除了第m个校验节点外的所有校验节点为M(n)。
Log-BP算法的译码过程:
译码过程:
初始化:对于接收到的每个变量节点n计算初始信道信息,并对每个点计算初始信息
迭代译码:
(1)校验点计算
其中α=∑n" ∈N(m)|αm,n"|
(2)变量节点计算
对于每个变量节点n,在完成变量节点计算后,对log似然率λn进行更新:
(3)判决条件
(a)如果λn>0,则x"N=0;返之如果λn≤0,则x"N=1;
(b)如果H%26;#183;x"=0,则迭代结束,否则跳到第2步迭代译码部分,直至校验成功或者达到最大迭代次数。
上面算法中的αm,n和βm,n都被换为外部信息,其中αm,n是从变量节点向校验节点传递的信息,βm,n是从变量节点向校验节点传递的信息。通过log-BP算法和BP算法的比较可以实现,log-BP算法中除了f(x)=log
运算,剩下的都是加法运算,从在则避免了BP算法中乘运算过多的弊病。在本文中函数f(x)利用FPGA中的查找表(Look-up Table,LUT)实现。
2 H矩阵的生成
Gallager提出的LDPC码的H矩阵必须满足以下两点:
(1) H矩阵的第一列有j个1,j>=3;
(2) H矩阵的第一行有k个1,k>j;
本文中选择j=3,k=6,通过编程用matalab软件生成若干满足条件的H矩阵,选择其中一个性能最好的H矩阵进行LDPC码的fpga译码实现。当n=20时,最终选择H矩阵如图2所示。
3 LDPC码完全平行译码结构
由二部图可能直接地看出,变量节点计算需要的信息只需由校验节点来提供,校验节点计算需要的信息只需要由变量节点来提供,译码器在设计时可以给每个变量节点分配一个变量节点处理单元(Variable Node processing Unit,VNU),给每个校验节点分配一个校验节点处理单元(Check Node processing Unit,CNU),从而实现译码器的完全并行结构。
译码器的核心模块是迭代译码部分,迭代译码的结构与算法是紧密相连的,译码结构的确定必须在仔细分析算法的基础上,迭代译码的过程是CNU和VNU模块计算结果的相互传递和更新。如果直接将CNU和VNU连接,不但不容易控制迭代的过程并且可能出现不稳定状态,所以需要在CNU和VNU之间安插RAM以起到数据的缓冲和控制作用。输入、输出模块分别控制数据的输入和输出,当条件满足或者迭代完成时,读入数据并把迭代结果输出。
3.1 迭代译码结构
图3表示平行迭代译码结构。其中只画出两个节点之间一条数据通路的连接方式,因为是完全平行迭代译码结构,其他节点之间数据通路的连接方式与此相同。信道初始化数据送入VNU模块进行数据处理后,送入RAM模块,数据经过CNU模块,最后再送入VNU模块,这样就完成一次迭代。数据信息从VNU到CNU与数据信息从CNU到VNU分别在不同的数据线上传输(图1)。
3.2 变量节点结构(VNU)
变量节点的结构如图4所示。从中可以看出每个变量节点的度为3(j=3),四个5bit输入信息包含一个信道信息和三个与之相连的校验节点的信息。由log-BP算法可以看到α进行的是量化值的计算,没有牵扯到符号位,而ψm,n和λn的计算都有包含符号位的相加,实际上其中还包含了减法运算,而本文采用的符号信息位的格式不能用于减法运算,需要将其转换的其他格式。在本文进行和运算时,首先将转换为二进制补码形式,运算结束后再转换回符号量化位格式,查表(FX_LUT)进行f(x)运算。函数
可由FPGA中的逻辑单元LUT来实现。Comb模块把1bit的判决结果x、4bit的查找表运算结果与符号位合在一起作为外部信息送入校验节点(CNU)。图4上半部分为输入译码的结果,下半部分为三个数据输出通道中的一个,其余两个的结构与此完全相同,唯一不同的是加法器的输入,根据log-BP算法,其中初始化数据经过S-to-T转换后的数据输入固定,另外两个输入数据为其他两个数据通道的输入经过S-to-T转换后的数据。
图4
3.3 校验节点结构(CNU)
校验节点(CNU)结构如图5所示,每个检验节点的度数为6(k=5),图5只画出数据的一个输出通道,其余5个输出通道的结构与此完全相同,加法器为检验节点首先对外部信息中的判决结果进行验证,看是否满足H%26;#183;x T=0,满足则结束迭代。CNU模块中f(x)的x计算是只计算量化值而不管正负的,而本译码器采用的符号量化位转化为二进制初码形式。
图5
3.4 数据输入与输出
完全平行译码结构可以分为三部分:迭代译码模块、数据输入模块和数据输出模块。因为是完全平行译码方式,输入数据经过串并转换后,同时读入VNU进行迭代计算。在数据输出模块,每一次迭代完成要进行条件判别,如果CNU所有的校验结果都为零,则输出数据。或者已经完成17次迭代,此时强制输出数据。数据的输入与输出分别用不同的时钟进行控制。图6为译码器其中一帧数据的测试结果,编码之前的信息为01010101,图6中OutData为编码后数据的输出。
4 FPGA实现
根据规则(3,6)LDPC的完全平行译码结构,选择在Xilinx Virtex2 XC2V1000-fg256上对其进行物理实现,译码器采用Verilog硬件描述语言编写,用Xilinx的开发工具ISE6.1在XC2V1000上对译码器进行布局布线。通过时序分析可以看出,译码器的最大时钟频率为20MHz,以输入时钟为基准,完成17次迭代最多需要20个时钟,完成一帧数据的输入需要20个时钟,可以得出译码器的最大译码速率为:V=20%26;#215;20/20=20Mbps。图7为帧长为20bit的LDPC码的译码性能,因为码长较短,性能没有达到最好。这为更高速LDPC码译码器的设计打下坚实的基础,码长为1024bit,传输速率可进一步提高,甚至达到1Gbps,译码性能会更好。
本文基于软判译码规则,采用完全平行译码结构,设计出帧长为20bit,码率为1/2的规则(3,6)LDPC码的译码器,在Xilinx virtex2 XC2V1000-fg256上对其进行物理实现,最大迭代次数为17次,传输速率达到20Mbps。DPC码具有良好译码性能,与Turbo码相比更易于硬件实现,并能得到更高的译码速度。下一步将设计出码长为1024bit或码长更长的LDPC译码器,进一步提高传输速率,降低误码率,为加速该技术在中国的商用奠定基础。
上一篇:基于ASIC+FPGA的IPv6路由器PoS接口设计
下一篇:自适应算术编码的FPGA实现
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 MAX2674EWT+T
MAX2674EWT+T










 京公网安备 11010802033920号
京公网安备 11010802033920号