嵌入式系统一般由嵌入式微处理器、外围硬件设备、嵌入式操作系统以及用户应用程序四部分组成,其发展主要体现在芯片技术的进步上,以及在芯片技术限制下的算法与软件的进步上。随着芯片制造技术的发展,嵌入式系统的结构也随之发生了重大变革,从基于微处理器的嵌入式系统到基于微控制器的嵌入式系统,继而将可编程逻辑PLD(Programmable Logic Device)技术引入到嵌入式系统设计中,进而又发展到SoC(System on Chip),最终将PLD与嵌入式处理器结合而成为SoPC(System on
Programmable Chip),使得SoPC成为嵌入式系统设计的一个发展趋势。
本文采用SoPC内嵌32位的软核处理器Nios,实现了一个UART串行口和以太网接口的转换器(以下简称转换器),并基于Microtronix公司针对Nios处理器移植的μClinux开发了应用程序.其系统结构如图l所示。
 1 基于SoPC的嵌入式硬件平台构建
不同于基于处理器或控制器及SoC的嵌入式系统,基于SoPC的嵌入式系统具有可配置的特点,不会包括任何专用外设,而是可根据需要灵活地在一片FPGA中构造外设接口。
基于SoPC的嵌入式系统主要由1片核心芯片SoPC和片外器件,以及一些相关的接口设备组成。本文所要实现的转换器采用Altera公司的Cyclone芯片及外围电路组成,其中外围电路包括2片512 KB的SRAM、l片8MB的Flash、UART电子转换器和1片以太网控制器LAN91C111。系统电路框图如图2所示。
1 基于SoPC的嵌入式硬件平台构建
不同于基于处理器或控制器及SoC的嵌入式系统,基于SoPC的嵌入式系统具有可配置的特点,不会包括任何专用外设,而是可根据需要灵活地在一片FPGA中构造外设接口。
基于SoPC的嵌入式系统主要由1片核心芯片SoPC和片外器件,以及一些相关的接口设备组成。本文所要实现的转换器采用Altera公司的Cyclone芯片及外围电路组成,其中外围电路包括2片512 KB的SRAM、l片8MB的Flash、UART电子转换器和1片以太网控制器LAN91C111。系统电路框图如图2所示。
 SoPC芯片内嵌软核处理器Nios。在SoPC芯片中,除了CPU外,可配片上ROM、内部定时器、UART串行口、SRAM、Flash接口等系统部件。这些部件均以可编程逻辑部件的形式实现,芯片内部部件结构图如图3所示。CPU和所有部件通过Avalon总线连接在一起。
SoPC芯片内嵌软核处理器Nios。在SoPC芯片中,除了CPU外,可配片上ROM、内部定时器、UART串行口、SRAM、Flash接口等系统部件。这些部件均以可编程逻辑部件的形式实现,芯片内部部件结构图如图3所示。CPU和所有部件通过Avalon总线连接在一起。
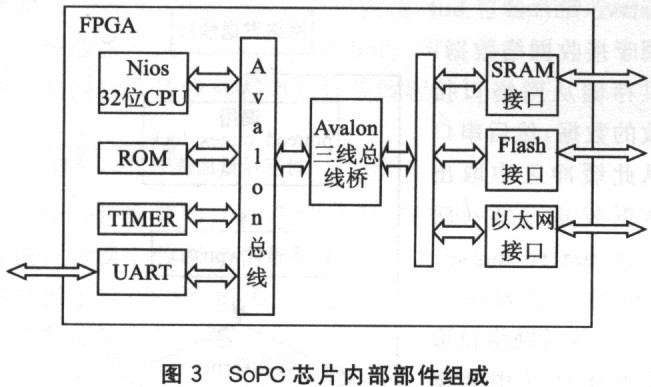 SoPC芯片内系统模块和Avalon总线模块均由SoPCBuilder工具自动生成,利用Qualtus II集成开发环境可实现芯片内的逻辑设计及其引脚定义。经编译生成后缀为.sof的硬件映像文件,通过ByteBlasterII线缆下载到目标板的Cyclone芯片中,或将.sof文件转换成.flash文件,下载到目标板的Flash中。这样就完成了转换器的硬件设计。
2 基于μClinux的SoPC应用程序开发
应用程序的开发可在硬件平台上直接进行,但需了解所有硬件部件的细节,并编写相应的驱动子程序,其软件设计难度及工作量大,且可移植性差。基于嵌入式操作系统的应用程序,其所有的硬件细节均对用户屏蔽。对硬件进行直接控制的底层驱动程序均封装在操作系统内,通过设备驱动程序接口来完成,用户只需在高层通过操作系统所提供的系统调用进行编程。μClinux是针对控制领域的嵌入式Linux操作系统,适合如Nios处理器等不具备内存管理单元(MMU)的微处理器/微控制器。基于操作系统进行开发,需将操作系统加载到硬件平台中,μClinux可以以部件的形式集成到SoPC系统中。
2.1 加载μClinux系统的步骤
将μClinux加载到SoPC目标板上时需提供一个交叉编译环境,硬件要求具有一个串口的PC工作站、基于Nios处理器的SoPC目标板和ByteBlasterMV线缆等。软件需求WindowsNTv4.0、Windows2000或WindowsXP、Altera Nios开发包NDK 3.0中所提供的Nios GNUPro工具、Ahera Nios开发包所提供的cygwin安装,以及Quartus II可编程逻辑开发工具V2.2等。
2.1.1 创建和装载内核映像
创建和装载μClinux映像文件在Linux DeveloperBash环境下进行,首先需按下列步骤配置和构建内核。
[Linux Developer]…μClinux/:cd linux
[Linux Developer]…linux/:make xconfig
[Linux Developer]…linux/:make clean
[Linux Developer]…1inux/:make dep
[Linux Developer]…linux/:make
[Linux Developer]…μClinux/:make linux.flash
生成的linux.flash文件即为μClinux内核映像。当SoPC目标板加电,片内ROM中的GERMS监控程序运行后,在[Linux Developer]…μClinux/:下键入nios-runlinux.flash,即下载linux.flash文件到目标板上,完成内核映像的加载。
2.1.2创建和装载根文件系统
除了装载内核外,还需装载根文件系统。μClinux采用romfs文件系统,这种文件系统相对于一般的ext2文件系统要求更少空间。
在主机上Linux的target目录表示在μClinux下的根(root)目录。当前的脚本和工具可将target目录转换成映像文件(romdisk.flash),按如下步骤创建:
[Linux Developer]…μClinux/:make clean_target
[Linux Developer]…μClinux/:make romfs
然后键入以下命令:
[Linux Developer]…μClinux/:nios-run romdisk.flash
即将romdisk.flash文件下载到目标板上,完成μClinux的根文件系统的加载。
2.1.3 加载应用程序
用户应用程序可通过target目录加载到根文件系统中,可根据需要重建romdisk映像。应用程序在userland目录下,编译生成运行文件后拷贝到target目录树中,并根据target目录的内容创建romdisk.flash文件。新建一个应用程序,首先打开一个LinuxDeveloperBash窗,在userland目录中创建一个目录app,应用程序源文件存放在此目录中,然后在userland/app/中建立一个makefile文件。
Makefile内容如下所示,其中appfile为应用程序名。
STACKSlZE=8192
include../../Rules.mak
all:appfile.relocbflt
SOURCES=appfile.c
install:
$(ROMFSINST)appfile.reloebfh
$(ROMFSDIR)/bin/appfile$(EXECSUFFIX)
clean:
rm-f *.[iods]core appfile appfile.*elf appfile.*bflt
运行make对应用程序进行编译并修改userland/.eonfig和/userland/Makefile文件。在userland/.config文件中,增加一行CONFIG_MY_APP=y,在userland/Makefile文件中,增加dir_$(CONFIG_MY_APP)+=app,进入userland子目录,运行make,即可将应用程序安装到userland/bin中,并根据userland/.config文件中相应变量的指示将应用程序二进制拷贝到target目录中。
最后,键入以下命令重新构建romdisk映像文件(romdisk.flash),并下载到目标板上。
[Linux Developer]…uClinux/:make clean_target
[Linux Developer]…uClinux/:make romfs
[Linux Developer]…uClinux/:nios-run romdisk.flash
2.1.4 运行μClinux
完成μClinux内核及文件系统的装载后,即可运行μClinux。键入g800000(800000为启动代码地址,在SoPC Builder中设置),μClinux自动完成初始化过程,用户输入登录用户名nios,密码μClinux,出现μClinux的提示符#,表示已进入μClinux运行环境。
2.2 转换器应用程序的实现
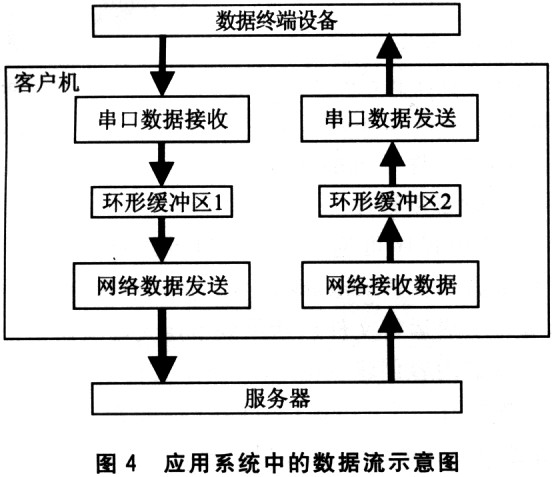
转换器应用系统主要完成网络接口和串行接口间的数据传输,所传输的数据流如图4所示。μClinux操作系统中提供了网络驱动程序和串口驱动程序,并提供了多线程的支持。
SoPC芯片内系统模块和Avalon总线模块均由SoPCBuilder工具自动生成,利用Qualtus II集成开发环境可实现芯片内的逻辑设计及其引脚定义。经编译生成后缀为.sof的硬件映像文件,通过ByteBlasterII线缆下载到目标板的Cyclone芯片中,或将.sof文件转换成.flash文件,下载到目标板的Flash中。这样就完成了转换器的硬件设计。
2 基于μClinux的SoPC应用程序开发
应用程序的开发可在硬件平台上直接进行,但需了解所有硬件部件的细节,并编写相应的驱动子程序,其软件设计难度及工作量大,且可移植性差。基于嵌入式操作系统的应用程序,其所有的硬件细节均对用户屏蔽。对硬件进行直接控制的底层驱动程序均封装在操作系统内,通过设备驱动程序接口来完成,用户只需在高层通过操作系统所提供的系统调用进行编程。μClinux是针对控制领域的嵌入式Linux操作系统,适合如Nios处理器等不具备内存管理单元(MMU)的微处理器/微控制器。基于操作系统进行开发,需将操作系统加载到硬件平台中,μClinux可以以部件的形式集成到SoPC系统中。
2.1 加载μClinux系统的步骤
将μClinux加载到SoPC目标板上时需提供一个交叉编译环境,硬件要求具有一个串口的PC工作站、基于Nios处理器的SoPC目标板和ByteBlasterMV线缆等。软件需求WindowsNTv4.0、Windows2000或WindowsXP、Altera Nios开发包NDK 3.0中所提供的Nios GNUPro工具、Ahera Nios开发包所提供的cygwin安装,以及Quartus II可编程逻辑开发工具V2.2等。
2.1.1 创建和装载内核映像
创建和装载μClinux映像文件在Linux DeveloperBash环境下进行,首先需按下列步骤配置和构建内核。
[Linux Developer]…μClinux/:cd linux
[Linux Developer]…linux/:make xconfig
[Linux Developer]…linux/:make clean
[Linux Developer]…1inux/:make dep
[Linux Developer]…linux/:make
[Linux Developer]…μClinux/:make linux.flash
生成的linux.flash文件即为μClinux内核映像。当SoPC目标板加电,片内ROM中的GERMS监控程序运行后,在[Linux Developer]…μClinux/:下键入nios-runlinux.flash,即下载linux.flash文件到目标板上,完成内核映像的加载。
2.1.2创建和装载根文件系统
除了装载内核外,还需装载根文件系统。μClinux采用romfs文件系统,这种文件系统相对于一般的ext2文件系统要求更少空间。
在主机上Linux的target目录表示在μClinux下的根(root)目录。当前的脚本和工具可将target目录转换成映像文件(romdisk.flash),按如下步骤创建:
[Linux Developer]…μClinux/:make clean_target
[Linux Developer]…μClinux/:make romfs
然后键入以下命令:
[Linux Developer]…μClinux/:nios-run romdisk.flash
即将romdisk.flash文件下载到目标板上,完成μClinux的根文件系统的加载。
2.1.3 加载应用程序
用户应用程序可通过target目录加载到根文件系统中,可根据需要重建romdisk映像。应用程序在userland目录下,编译生成运行文件后拷贝到target目录树中,并根据target目录的内容创建romdisk.flash文件。新建一个应用程序,首先打开一个LinuxDeveloperBash窗,在userland目录中创建一个目录app,应用程序源文件存放在此目录中,然后在userland/app/中建立一个makefile文件。
Makefile内容如下所示,其中appfile为应用程序名。
STACKSlZE=8192
include../../Rules.mak
all:appfile.relocbflt
SOURCES=appfile.c
install:
$(ROMFSINST)appfile.reloebfh
$(ROMFSDIR)/bin/appfile$(EXECSUFFIX)
clean:
rm-f *.[iods]core appfile appfile.*elf appfile.*bflt
运行make对应用程序进行编译并修改userland/.eonfig和/userland/Makefile文件。在userland/.config文件中,增加一行CONFIG_MY_APP=y,在userland/Makefile文件中,增加dir_$(CONFIG_MY_APP)+=app,进入userland子目录,运行make,即可将应用程序安装到userland/bin中,并根据userland/.config文件中相应变量的指示将应用程序二进制拷贝到target目录中。
最后,键入以下命令重新构建romdisk映像文件(romdisk.flash),并下载到目标板上。
[Linux Developer]…uClinux/:make clean_target
[Linux Developer]…uClinux/:make romfs
[Linux Developer]…uClinux/:nios-run romdisk.flash
2.1.4 运行μClinux
完成μClinux内核及文件系统的装载后,即可运行μClinux。键入g800000(800000为启动代码地址,在SoPC Builder中设置),μClinux自动完成初始化过程,用户输入登录用户名nios,密码μClinux,出现μClinux的提示符#,表示已进入μClinux运行环境。
2.2 转换器应用程序的实现
转换器应用系统主要完成网络接口和串行接口间的数据传输,所传输的数据流如图4所示。μClinux操作系统中提供了网络驱动程序和串口驱动程序,并提供了多线程的支持。
 转换器应用系统中的串口收发数据和网络口收发数据是异步进行的,可分别作为一个任务来对待,任务间是并发的,因此可采用多线程程序设计技术来实现多任务间的并发执行,系统主程序流程图如图5所示。
转换器应用系统中的串口收发数据和网络口收发数据是异步进行的,可分别作为一个任务来对待,任务间是并发的,因此可采用多线程程序设计技术来实现多任务间的并发执行,系统主程序流程图如图5所示。
 在此应用系统中有4个任务,分别创建4个线程:网络接收线程、网络发送线程、串口接收线程和串口发送线程。这4个线程可并发执行.因网络速度与串口速度存在着差异,需设置相应的缓冲区来对收发数据进行缓冲。在此应用系统中设置两个环形缓冲区,如图4所示,其中nctrv_uartsd_buf用于接收网络数据,供存储从网络口接收的数据,然后串口从此缓冲区中取出数据发送。另一缓冲区uartrv_netsd_bur用于接收串口数据,然后网络口取出此缓冲区中数据发送出去。
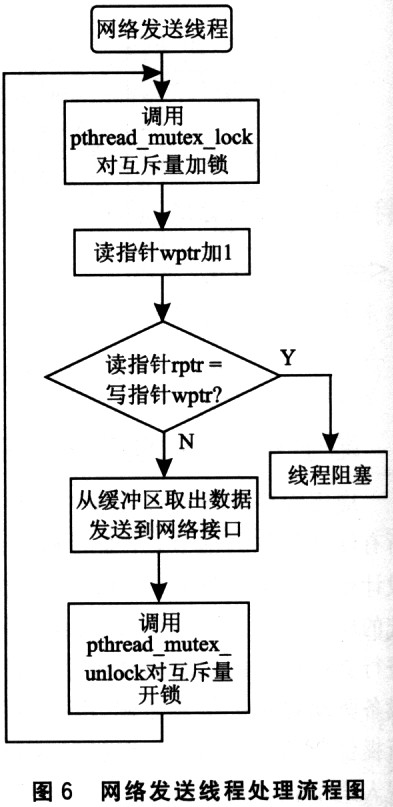
线程间需实现相互通信和同步,共用缓冲区既要互斥执行又要同步执行,其操作遵循生产者和消费者模型。线程间的互斥操作采用互斥锁(mu-tex)来实现。线程间的同步通过设置两个指针来实现,一个是读指针,另一个是写指针,写指针指向队头,初
始化为0,读指针指向队尾,初始化为BUFSIZE-1。当写数据时,比较读写指针是否相等,相同则写线程阻塞;不相等,则写入数据,然后将写指针加1。当读数据时,读指针加1,然后比较读写指针是否相等,相等则读线程阻塞;不相等,则读出数据。
网络发送线程(流程图如图6所示)和串口接收线程(流程图如图7所示)间共用环形缓冲区uartrv_netsd_buf。串口发送线程和网络接收线程共用环形缓冲区netrv_uartsd_buf。两线程间的关系和处理类似网络发送线程和串口接收线程。
在此应用系统中有4个任务,分别创建4个线程:网络接收线程、网络发送线程、串口接收线程和串口发送线程。这4个线程可并发执行.因网络速度与串口速度存在着差异,需设置相应的缓冲区来对收发数据进行缓冲。在此应用系统中设置两个环形缓冲区,如图4所示,其中nctrv_uartsd_buf用于接收网络数据,供存储从网络口接收的数据,然后串口从此缓冲区中取出数据发送。另一缓冲区uartrv_netsd_bur用于接收串口数据,然后网络口取出此缓冲区中数据发送出去。
线程间需实现相互通信和同步,共用缓冲区既要互斥执行又要同步执行,其操作遵循生产者和消费者模型。线程间的互斥操作采用互斥锁(mu-tex)来实现。线程间的同步通过设置两个指针来实现,一个是读指针,另一个是写指针,写指针指向队头,初
始化为0,读指针指向队尾,初始化为BUFSIZE-1。当写数据时,比较读写指针是否相等,相同则写线程阻塞;不相等,则写入数据,然后将写指针加1。当读数据时,读指针加1,然后比较读写指针是否相等,相等则读线程阻塞;不相等,则读出数据。
网络发送线程(流程图如图6所示)和串口接收线程(流程图如图7所示)间共用环形缓冲区uartrv_netsd_buf。串口发送线程和网络接收线程共用环形缓冲区netrv_uartsd_buf。两线程间的关系和处理类似网络发送线程和串口接收线程。
 3 系统测试
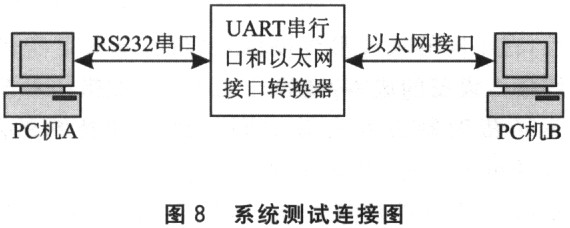
完成转换器的软硬件设计后,按如图8所示,连接系统进行转换器数据的传输测试。在PC机A上运行串口收发程序,而在PC机B上运行以太网收发程序,经测试后数据传输无误。
3 系统测试
完成转换器的软硬件设计后,按如图8所示,连接系统进行转换器数据的传输测试。在PC机A上运行串口收发程序,而在PC机B上运行以太网收发程序,经测试后数据传输无误。
引用地址:基于μClinux的SoPC应用系统设计
1 基于SoPC的嵌入式硬件平台构建
不同于基于处理器或控制器及SoC的嵌入式系统,基于SoPC的嵌入式系统具有可配置的特点,不会包括任何专用外设,而是可根据需要灵活地在一片FPGA中构造外设接口。
基于SoPC的嵌入式系统主要由1片核心芯片SoPC和片外器件,以及一些相关的接口设备组成。本文所要实现的转换器采用Altera公司的Cyclone芯片及外围电路组成,其中外围电路包括2片512 KB的SRAM、l片8MB的Flash、UART电子转换器和1片以太网控制器LAN91C111。系统电路框图如图2所示。
SoPC芯片内嵌软核处理器Nios。在SoPC芯片中,除了CPU外,可配片上ROM、内部定时器、UART串行口、SRAM、Flash接口等系统部件。这些部件均以可编程逻辑部件的形式实现,芯片内部部件结构图如图3所示。CPU和所有部件通过Avalon总线连接在一起。
SoPC芯片内系统模块和Avalon总线模块均由SoPCBuilder工具自动生成,利用Qualtus II集成开发环境可实现芯片内的逻辑设计及其引脚定义。经编译生成后缀为.sof的硬件映像文件,通过ByteBlasterII线缆下载到目标板的Cyclone芯片中,或将.sof文件转换成.flash文件,下载到目标板的Flash中。这样就完成了转换器的硬件设计。
2 基于μClinux的SoPC应用程序开发
应用程序的开发可在硬件平台上直接进行,但需了解所有硬件部件的细节,并编写相应的驱动子程序,其软件设计难度及工作量大,且可移植性差。基于嵌入式操作系统的应用程序,其所有的硬件细节均对用户屏蔽。对硬件进行直接控制的底层驱动程序均封装在操作系统内,通过设备驱动程序接口来完成,用户只需在高层通过操作系统所提供的系统调用进行编程。μClinux是针对控制领域的嵌入式Linux操作系统,适合如Nios处理器等不具备内存管理单元(MMU)的微处理器/微控制器。基于操作系统进行开发,需将操作系统加载到硬件平台中,μClinux可以以部件的形式集成到SoPC系统中。
2.1 加载μClinux系统的步骤
将μClinux加载到SoPC目标板上时需提供一个交叉编译环境,硬件要求具有一个串口的PC工作站、基于Nios处理器的SoPC目标板和ByteBlasterMV线缆等。软件需求WindowsNTv4.0、Windows2000或WindowsXP、Altera Nios开发包NDK 3.0中所提供的Nios GNUPro工具、Ahera Nios开发包所提供的cygwin安装,以及Quartus II可编程逻辑开发工具V2.2等。
2.1.1 创建和装载内核映像
创建和装载μClinux映像文件在Linux DeveloperBash环境下进行,首先需按下列步骤配置和构建内核。
[Linux Developer]…μClinux/:cd linux
[Linux Developer]…linux/:make xconfig
[Linux Developer]…linux/:make clean
[Linux Developer]…1inux/:make dep
[Linux Developer]…linux/:make
[Linux Developer]…μClinux/:make linux.flash
生成的linux.flash文件即为μClinux内核映像。当SoPC目标板加电,片内ROM中的GERMS监控程序运行后,在[Linux Developer]…μClinux/:下键入nios-runlinux.flash,即下载linux.flash文件到目标板上,完成内核映像的加载。
2.1.2创建和装载根文件系统
除了装载内核外,还需装载根文件系统。μClinux采用romfs文件系统,这种文件系统相对于一般的ext2文件系统要求更少空间。
在主机上Linux的target目录表示在μClinux下的根(root)目录。当前的脚本和工具可将target目录转换成映像文件(romdisk.flash),按如下步骤创建:
[Linux Developer]…μClinux/:make clean_target
[Linux Developer]…μClinux/:make romfs
然后键入以下命令:
[Linux Developer]…μClinux/:nios-run romdisk.flash
即将romdisk.flash文件下载到目标板上,完成μClinux的根文件系统的加载。
2.1.3 加载应用程序
用户应用程序可通过target目录加载到根文件系统中,可根据需要重建romdisk映像。应用程序在userland目录下,编译生成运行文件后拷贝到target目录树中,并根据target目录的内容创建romdisk.flash文件。新建一个应用程序,首先打开一个LinuxDeveloperBash窗,在userland目录中创建一个目录app,应用程序源文件存放在此目录中,然后在userland/app/中建立一个makefile文件。
Makefile内容如下所示,其中appfile为应用程序名。
STACKSlZE=8192
include../../Rules.mak
all:appfile.relocbflt
SOURCES=appfile.c
install:
$(ROMFSINST)appfile.reloebfh
$(ROMFSDIR)/bin/appfile$(EXECSUFFIX)
clean:
rm-f *.[iods]core appfile appfile.*elf appfile.*bflt
运行make对应用程序进行编译并修改userland/.eonfig和/userland/Makefile文件。在userland/.config文件中,增加一行CONFIG_MY_APP=y,在userland/Makefile文件中,增加dir_$(CONFIG_MY_APP)+=app,进入userland子目录,运行make,即可将应用程序安装到userland/bin中,并根据userland/.config文件中相应变量的指示将应用程序二进制拷贝到target目录中。
最后,键入以下命令重新构建romdisk映像文件(romdisk.flash),并下载到目标板上。
[Linux Developer]…uClinux/:make clean_target
[Linux Developer]…uClinux/:make romfs
[Linux Developer]…uClinux/:nios-run romdisk.flash
2.1.4 运行μClinux
完成μClinux内核及文件系统的装载后,即可运行μClinux。键入g800000(800000为启动代码地址,在SoPC Builder中设置),μClinux自动完成初始化过程,用户输入登录用户名nios,密码μClinux,出现μClinux的提示符#,表示已进入μClinux运行环境。
2.2 转换器应用程序的实现
转换器应用系统主要完成网络接口和串行接口间的数据传输,所传输的数据流如图4所示。μClinux操作系统中提供了网络驱动程序和串口驱动程序,并提供了多线程的支持。
转换器应用系统中的串口收发数据和网络口收发数据是异步进行的,可分别作为一个任务来对待,任务间是并发的,因此可采用多线程程序设计技术来实现多任务间的并发执行,系统主程序流程图如图5所示。
在此应用系统中有4个任务,分别创建4个线程:网络接收线程、网络发送线程、串口接收线程和串口发送线程。这4个线程可并发执行.因网络速度与串口速度存在着差异,需设置相应的缓冲区来对收发数据进行缓冲。在此应用系统中设置两个环形缓冲区,如图4所示,其中nctrv_uartsd_buf用于接收网络数据,供存储从网络口接收的数据,然后串口从此缓冲区中取出数据发送。另一缓冲区uartrv_netsd_bur用于接收串口数据,然后网络口取出此缓冲区中数据发送出去。
线程间需实现相互通信和同步,共用缓冲区既要互斥执行又要同步执行,其操作遵循生产者和消费者模型。线程间的互斥操作采用互斥锁(mu-tex)来实现。线程间的同步通过设置两个指针来实现,一个是读指针,另一个是写指针,写指针指向队头,初
始化为0,读指针指向队尾,初始化为BUFSIZE-1。当写数据时,比较读写指针是否相等,相同则写线程阻塞;不相等,则写入数据,然后将写指针加1。当读数据时,读指针加1,然后比较读写指针是否相等,相等则读线程阻塞;不相等,则读出数据。
网络发送线程(流程图如图6所示)和串口接收线程(流程图如图7所示)间共用环形缓冲区uartrv_netsd_buf。串口发送线程和网络接收线程共用环形缓冲区netrv_uartsd_buf。两线程间的关系和处理类似网络发送线程和串口接收线程。
3 系统测试
完成转换器的软硬件设计后,按如图8所示,连接系统进行转换器数据的传输测试。在PC机A上运行串口收发程序,而在PC机B上运行以太网收发程序,经测试后数据传输无误。
上一篇:通过任务分割提高嵌入式系统的实时性
下一篇:嵌入式实时系统中断管理技术研究
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 M38510/10106BEC
M38510/10106BEC
小广播
热门活动
换一批
更多

最新应用文章
更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
- “感谢有你,感恩有礼”——感恩节抢楼&送谢礼活动
- 直播已结束【最新 TI C2000实时控制芯片 — F28003X】
- 爱“拼”才会赢 英飞凌栅极驱动IC拼图闯关 活动开始啦!
- 好消息!返现+抽奖,双重好礼助力openmv技术学习!
- 更新个人资料赢惊喜大礼
- TI C2000TM的信号链实时性评测和使用教程
- 推荐有礼,分享有你!DSP学习季开学了,推荐你最喜欢的TI DSP资料!
- EEworld&TI 喊你来玩BLE+ZigBee+6lowpan!
- 有奖直播:升升不息,瑞萨MCU的固件升级方案
- 直播已结束【ST 宽禁带高性能碳化硅(SiC)与氮化镓(GaN)产品技术及不同应用案例分享】(9:30入场)
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号