摘要:本文介绍一种手机翻盖耐久性测试系统。该系统由National Instruments公司的PXI-8186控制器、PXI-7344、UMI-7764、YASKAWA公司的SGDL-04AS伺服单元和SGML-04AF12伺服电机以及基于虚拟仪器的用户界面组成。该测试系统使用虚拟仪器使系统规模最小化,提高系统的稳定性且易于维护和扩展,操作界面友好。
关键词:虚拟仪器;测试系统;伺服单元;伺服电机
Key words: Virtual Instrument; Measurement system; Servo Pack; Servo Motor
手机翻盖耐久性测试即将待测翻盖手机重复开合预设的次数,然后观察手机的各部分性能是否完好,这在翻盖手机的生产过程中是相当重要的一环。以往采用气动方式的系统运行速度较慢(约为每2秒1次)且操作界面不够友好。本文介绍的基于虚拟仪器技术的手机翻盖耐久性测试系统采用NI Motion 控制模块控制伺服电机进行驱动,运行速度可达到原来的4倍多且同时可对4部手机进行测试,而采用National Instruments公司的虚拟仪器(LabVIEW)进行开发,使操作界面非常友好。
在测试过程中操作人员针对每批不同型号的手机在初次测试时可使用微调功能将各个参数调整至理想值,并且可将这些参数存成相应的配置文件以备以后测试同样型号手机时使用,这样大大减少了每次测试时的重复操作,提高了系统的自动化程度。
1. 系统原理及概述
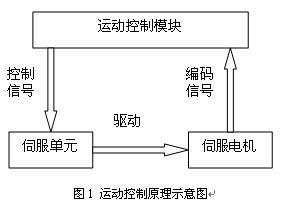
1.1 运动控制原理
运动控制的原理简单来说即由运动控制模块发出控制信号,如脉冲信号和模拟电压量等,这两种控制信号分别对应于位置控制模式和速度控制模式,伺服电机在相应的模式下接收到控制信号便能按照预定的方式运动。但是电机的运动存在误差,特别在模拟的速度控制模式下,因此需要电机发出编码信号反馈到运动控制模块,使运动控制模块能够根据实际的运动情况做出相应的补偿来消除累计误差,这一点对于本系统这样需要长时间连续运行的系统来说尤为重要。下图为运动控制的简单原理示意图:
 1.2 系统概述
本系统利用NI Motion 控制模块对伺服电机运动进行速度控制,按照用户设置的参数驱动相应的拨片、拨杆控制手机翻盖的开合。整个系统框图如图2所示:
1.2 系统概述
本系统利用NI Motion 控制模块对伺服电机运动进行速度控制,按照用户设置的参数驱动相应的拨片、拨杆控制手机翻盖的开合。整个系统框图如图2所示:
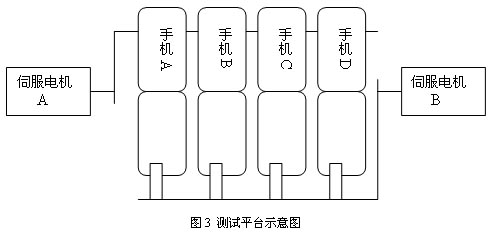
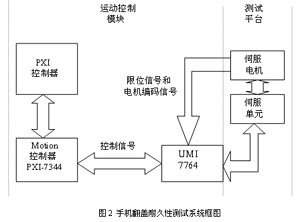 整个系统由两部分组成:运动控制部分和测试平台部分。运动控制部分由NI PXI控制器和运动控制模块NI PXI-7344发出运动控制电压信号V-REF,通过NI UMI 7764接至伺服电机驱动器。测试平台部分包括两套独立的平台,每套平台有一组电机控制4台待测手机翻盖的开合(见图3)。全部4台电机的控制信号分别由NI PXI-7344的4轴提供。每台电机上均有编码信号反馈至运动控制模块以形成闭环控制回路,另有Forward Limit和Reverse Limit信号反馈至运动控制模块用以确定系统的初始位置以及防止电机运动超出极限位置。
整个系统由两部分组成:运动控制部分和测试平台部分。运动控制部分由NI PXI控制器和运动控制模块NI PXI-7344发出运动控制电压信号V-REF,通过NI UMI 7764接至伺服电机驱动器。测试平台部分包括两套独立的平台,每套平台有一组电机控制4台待测手机翻盖的开合(见图3)。全部4台电机的控制信号分别由NI PXI-7344的4轴提供。每台电机上均有编码信号反馈至运动控制模块以形成闭环控制回路,另有Forward Limit和Reverse Limit信号反馈至运动控制模块用以确定系统的初始位置以及防止电机运动超出极限位置。
 2. 硬件连接
硬件配线包括伺服单元与伺服电机的连接、运动控制模块与伺服单元的连接。其中伺服单元与伺服电机的连接有专用的电缆和相应的端子定义,与伺服单元和伺服电机的的类型有关。下图是运动控制模块与伺服单元的连接以及限位信号的连接图:
2. 硬件连接
硬件配线包括伺服单元与伺服电机的连接、运动控制模块与伺服单元的连接。其中伺服单元与伺服电机的连接有专用的电缆和相应的端子定义,与伺服单元和伺服电机的的类型有关。下图是运动控制模块与伺服单元的连接以及限位信号的连接图:
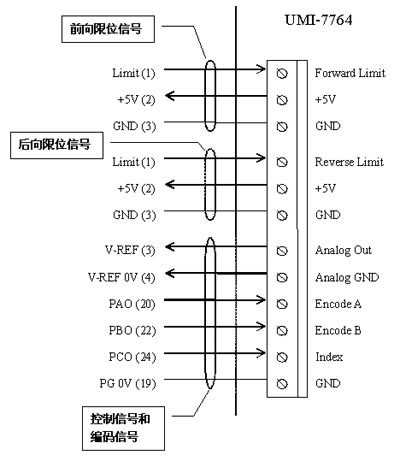 图4 运动控制模块与伺服单元及限位信号连接示意图
3. 软件结构和功能
整个软件是在National Instruments公司的面向对象的图形化编程语言LabVIEW 7.1下开发完成的,从上到下分为三层:高层通讯层,中层运动控制层,以及底层的驱动程序和开发环境支持。
底层开发环境和驱动程序接口是由软硬件厂商提供的,包括LabVIEW 7.1图形化编程环境和运动控制板卡的驱动程序。中层的运动控制层是在LabVIEW环境下编程实现电机的运动控制,包括电机运动位置、速度以及对于本系统整体的运动流程。高层的通讯层是用于将用户设置的各项参数传递到运动控制层,同时将用户所需信息如当前运动速度、剩余时间等反馈到用户界面。
4. 基于虚拟仪器的操作界面
本系统使用Labview 7.1设计了友好的操作界面,如图5所示:
图4 运动控制模块与伺服单元及限位信号连接示意图
3. 软件结构和功能
整个软件是在National Instruments公司的面向对象的图形化编程语言LabVIEW 7.1下开发完成的,从上到下分为三层:高层通讯层,中层运动控制层,以及底层的驱动程序和开发环境支持。
底层开发环境和驱动程序接口是由软硬件厂商提供的,包括LabVIEW 7.1图形化编程环境和运动控制板卡的驱动程序。中层的运动控制层是在LabVIEW环境下编程实现电机的运动控制,包括电机运动位置、速度以及对于本系统整体的运动流程。高层的通讯层是用于将用户设置的各项参数传递到运动控制层,同时将用户所需信息如当前运动速度、剩余时间等反馈到用户界面。
4. 基于虚拟仪器的操作界面
本系统使用Labview 7.1设计了友好的操作界面,如图5所示:
 图5 手机翻盖耐久性测试系统操作界面
测试程序操作步骤:
表1 操作界面控件功能
编号
名称
功能
1
User Type
指示当前的用户类型( Operator 、 Engineer 、 Administrator )
2
Cycle Counter
预先可设置的翻盖次数,系统运行到达上限时该平台停止运行。
3
Start Angle 1
End Angle 1
拨片的起始角度(如 180%26;#176; )和终止角度(如 100%26;#176; ),通过微调( Jog )过程来确定。
4
Start Angle 2
End Angle 2
拨杆的起始角度(如 0%26;#176; )和终止角度(如 130%26;#176; ),通过微调( Jog )过程来确定。
5
Velocity
电机运动过程中的最大速度。
6
Acceleration
电机启动与停止时的加(减)速度。
7
Time 1-2
拨片开始往回动作到拨杆开始动作之间的时间间隔。
8
Time 2-1
拨杆开始往回动作到拨片开始动作之间的时间间隔。减小上述 2 个参数可以有效加快系统的运行速度。
9
Current Cycle
输出指示当前时刻的翻盖次数。
10
Cycle/s
输出指示当前时刻每秒翻盖的次数。
11
Left Time (h)
输出指示到预设的翻盖次数所剩余的时间。
12
Load Setting
按该控件从指定的文件载入上述的控制参数。并使拨杆、拨片到达载入的文件中所制定的位置。此时该平台其它控件不可用。
13
Save Setting
按该控件将上述控制参数存入指定的文件。此时该平台其它控件不可用。( Operator 用户不可用)
14
Initialize
系统初始化。( Operator 用户不可用)
使拨片、拨杆到达预定的初始位置并停止。此时该平台其它控件不可用。
15
Jog
微调操作。( Operator 用户不可用)
按该控件弹出微调面板,用户可以将拨片、拨杆微调至理想位置。
此时该平台其它控件不可用。
16
Test/Continue
开始(继续)测试。有以下两种情况:
⑴ 前一操作为 Pause 时按该控件表示继续测试,参数 #8 在原来基础上继续增加。
⑵ 前一操作为 Stop 或到达预设上限停止时按该控件表示开始新测试,参数 #8 从 0 开始增加。
此时该平台仅有 Pause 和 Stop 可用。
17
Pause
暂停测试。
此时系统停止运行,参数 #8 保持不变。暂停后该平台除 Pause 和 Stop 其它控件均可用。
18
Stop
停止测试。
此时系统停止运行,参数 #8 为 0 。停止后该平台除 Pause 和 Stop 其它控件均可用。
19
Setting File
Path
设置读取或写入控制参数文件的默认路径。
20
Change User
按该控件改变用户身份,登录成功后相应权限会发生变化。
21
Config
配置 NI PXI-7344 Board ID 及各轴与电机间对应关系。除非硬件连接发生改动请不要随意使用该控件并修改面板设置,否则可能导致系统无法正常运行。(仅有 Administrator 用户可用)
22
Exit
退出系统。
1) 运行程序,系统自动以Operator登录。
2) 系统开始对运动控制模块进行初始化,完成后弹出对话框询问是否需要载入控制参数,若选No则系统自动载入上次退出程序时的设置并使拨杆、拨片到达相应位置。若选Yes系统继续弹出对话框询问需要载入哪套平台的控制参数。选定后系统载入相应配置文件并使拨杆、拨片到达相应位置。
3) 若所测手机型号已有相应配置文件存在,跳至5)步。若该型号为初次测试,则以Engineer登录。按Initialize控件使该平台初始化。
4) 按Jog控件进入微调模式。将夹具微调至理想的起始位置和终止位置并记下对应角度值。按OK控件回到主面板并将控制参数#2、#3改为微调得到的结果。按Save Setting将当前设置存成新型号的配置文件。
5) 按Test/Continue控件开始测试。
6) 此时有3种不同情况:
① 等待翻盖次数到达控制参数#1所设上限后该平台停止运行。
② 按Stop控件停止操作,控制参数#8复0。
③ 按Pause控件暂停操作,控制参数#8保持当前值,可以调整控制参数后继续测试。
7) 按Exit控件退出测试系统。
4. 结束语
本测试系统实现了对手机翻盖的耐久性测试,相对于传统的测试系统测试速度大大提高,并提供完善灵活的用户管理和系统设置功能。通过实际生产测试表明该测试系统工作状态稳定,提高了整个生产过程的效率。
图5 手机翻盖耐久性测试系统操作界面
测试程序操作步骤:
表1 操作界面控件功能
编号
名称
功能
1
User Type
指示当前的用户类型( Operator 、 Engineer 、 Administrator )
2
Cycle Counter
预先可设置的翻盖次数,系统运行到达上限时该平台停止运行。
3
Start Angle 1
End Angle 1
拨片的起始角度(如 180%26;#176; )和终止角度(如 100%26;#176; ),通过微调( Jog )过程来确定。
4
Start Angle 2
End Angle 2
拨杆的起始角度(如 0%26;#176; )和终止角度(如 130%26;#176; ),通过微调( Jog )过程来确定。
5
Velocity
电机运动过程中的最大速度。
6
Acceleration
电机启动与停止时的加(减)速度。
7
Time 1-2
拨片开始往回动作到拨杆开始动作之间的时间间隔。
8
Time 2-1
拨杆开始往回动作到拨片开始动作之间的时间间隔。减小上述 2 个参数可以有效加快系统的运行速度。
9
Current Cycle
输出指示当前时刻的翻盖次数。
10
Cycle/s
输出指示当前时刻每秒翻盖的次数。
11
Left Time (h)
输出指示到预设的翻盖次数所剩余的时间。
12
Load Setting
按该控件从指定的文件载入上述的控制参数。并使拨杆、拨片到达载入的文件中所制定的位置。此时该平台其它控件不可用。
13
Save Setting
按该控件将上述控制参数存入指定的文件。此时该平台其它控件不可用。( Operator 用户不可用)
14
Initialize
系统初始化。( Operator 用户不可用)
使拨片、拨杆到达预定的初始位置并停止。此时该平台其它控件不可用。
15
Jog
微调操作。( Operator 用户不可用)
按该控件弹出微调面板,用户可以将拨片、拨杆微调至理想位置。
此时该平台其它控件不可用。
16
Test/Continue
开始(继续)测试。有以下两种情况:
⑴ 前一操作为 Pause 时按该控件表示继续测试,参数 #8 在原来基础上继续增加。
⑵ 前一操作为 Stop 或到达预设上限停止时按该控件表示开始新测试,参数 #8 从 0 开始增加。
此时该平台仅有 Pause 和 Stop 可用。
17
Pause
暂停测试。
此时系统停止运行,参数 #8 保持不变。暂停后该平台除 Pause 和 Stop 其它控件均可用。
18
Stop
停止测试。
此时系统停止运行,参数 #8 为 0 。停止后该平台除 Pause 和 Stop 其它控件均可用。
19
Setting File
Path
设置读取或写入控制参数文件的默认路径。
20
Change User
按该控件改变用户身份,登录成功后相应权限会发生变化。
21
Config
配置 NI PXI-7344 Board ID 及各轴与电机间对应关系。除非硬件连接发生改动请不要随意使用该控件并修改面板设置,否则可能导致系统无法正常运行。(仅有 Administrator 用户可用)
22
Exit
退出系统。
1) 运行程序,系统自动以Operator登录。
2) 系统开始对运动控制模块进行初始化,完成后弹出对话框询问是否需要载入控制参数,若选No则系统自动载入上次退出程序时的设置并使拨杆、拨片到达相应位置。若选Yes系统继续弹出对话框询问需要载入哪套平台的控制参数。选定后系统载入相应配置文件并使拨杆、拨片到达相应位置。
3) 若所测手机型号已有相应配置文件存在,跳至5)步。若该型号为初次测试,则以Engineer登录。按Initialize控件使该平台初始化。
4) 按Jog控件进入微调模式。将夹具微调至理想的起始位置和终止位置并记下对应角度值。按OK控件回到主面板并将控制参数#2、#3改为微调得到的结果。按Save Setting将当前设置存成新型号的配置文件。
5) 按Test/Continue控件开始测试。
6) 此时有3种不同情况:
① 等待翻盖次数到达控制参数#1所设上限后该平台停止运行。
② 按Stop控件停止操作,控制参数#8复0。
③ 按Pause控件暂停操作,控制参数#8保持当前值,可以调整控制参数后继续测试。
7) 按Exit控件退出测试系统。
4. 结束语
本测试系统实现了对手机翻盖的耐久性测试,相对于传统的测试系统测试速度大大提高,并提供完善灵活的用户管理和系统设置功能。通过实际生产测试表明该测试系统工作状态稳定,提高了整个生产过程的效率。
引用地址:基于虚拟仪器技术的手机翻盖耐久性测试系统
1.2 系统概述
本系统利用NI Motion 控制模块对伺服电机运动进行速度控制,按照用户设置的参数驱动相应的拨片、拨杆控制手机翻盖的开合。整个系统框图如图2所示:
整个系统由两部分组成:运动控制部分和测试平台部分。运动控制部分由NI PXI控制器和运动控制模块NI PXI-7344发出运动控制电压信号V-REF,通过NI UMI 7764接至伺服电机驱动器。测试平台部分包括两套独立的平台,每套平台有一组电机控制4台待测手机翻盖的开合(见图3)。全部4台电机的控制信号分别由NI PXI-7344的4轴提供。每台电机上均有编码信号反馈至运动控制模块以形成闭环控制回路,另有Forward Limit和Reverse Limit信号反馈至运动控制模块用以确定系统的初始位置以及防止电机运动超出极限位置。
2. 硬件连接
硬件配线包括伺服单元与伺服电机的连接、运动控制模块与伺服单元的连接。其中伺服单元与伺服电机的连接有专用的电缆和相应的端子定义,与伺服单元和伺服电机的的类型有关。下图是运动控制模块与伺服单元的连接以及限位信号的连接图:
图4 运动控制模块与伺服单元及限位信号连接示意图
3. 软件结构和功能
整个软件是在National Instruments公司的面向对象的图形化编程语言LabVIEW 7.1下开发完成的,从上到下分为三层:高层通讯层,中层运动控制层,以及底层的驱动程序和开发环境支持。
底层开发环境和驱动程序接口是由软硬件厂商提供的,包括LabVIEW 7.1图形化编程环境和运动控制板卡的驱动程序。中层的运动控制层是在LabVIEW环境下编程实现电机的运动控制,包括电机运动位置、速度以及对于本系统整体的运动流程。高层的通讯层是用于将用户设置的各项参数传递到运动控制层,同时将用户所需信息如当前运动速度、剩余时间等反馈到用户界面。
4. 基于虚拟仪器的操作界面
本系统使用Labview 7.1设计了友好的操作界面,如图5所示:
图5 手机翻盖耐久性测试系统操作界面
测试程序操作步骤:
表1 操作界面控件功能
编号
名称
功能
1
User Type
指示当前的用户类型( Operator 、 Engineer 、 Administrator )
2
Cycle Counter
预先可设置的翻盖次数,系统运行到达上限时该平台停止运行。
3
Start Angle 1
End Angle 1
拨片的起始角度(如 180%26;#176; )和终止角度(如 100%26;#176; ),通过微调( Jog )过程来确定。
4
Start Angle 2
End Angle 2
拨杆的起始角度(如 0%26;#176; )和终止角度(如 130%26;#176; ),通过微调( Jog )过程来确定。
5
Velocity
电机运动过程中的最大速度。
6
Acceleration
电机启动与停止时的加(减)速度。
7
Time 1-2
拨片开始往回动作到拨杆开始动作之间的时间间隔。
8
Time 2-1
拨杆开始往回动作到拨片开始动作之间的时间间隔。减小上述 2 个参数可以有效加快系统的运行速度。
9
Current Cycle
输出指示当前时刻的翻盖次数。
10
Cycle/s
输出指示当前时刻每秒翻盖的次数。
11
Left Time (h)
输出指示到预设的翻盖次数所剩余的时间。
12
Load Setting
按该控件从指定的文件载入上述的控制参数。并使拨杆、拨片到达载入的文件中所制定的位置。此时该平台其它控件不可用。
13
Save Setting
按该控件将上述控制参数存入指定的文件。此时该平台其它控件不可用。( Operator 用户不可用)
14
Initialize
系统初始化。( Operator 用户不可用)
使拨片、拨杆到达预定的初始位置并停止。此时该平台其它控件不可用。
15
Jog
微调操作。( Operator 用户不可用)
按该控件弹出微调面板,用户可以将拨片、拨杆微调至理想位置。
此时该平台其它控件不可用。
16
Test/Continue
开始(继续)测试。有以下两种情况:
⑴ 前一操作为 Pause 时按该控件表示继续测试,参数 #8 在原来基础上继续增加。
⑵ 前一操作为 Stop 或到达预设上限停止时按该控件表示开始新测试,参数 #8 从 0 开始增加。
此时该平台仅有 Pause 和 Stop 可用。
17
Pause
暂停测试。
此时系统停止运行,参数 #8 保持不变。暂停后该平台除 Pause 和 Stop 其它控件均可用。
18
Stop
停止测试。
此时系统停止运行,参数 #8 为 0 。停止后该平台除 Pause 和 Stop 其它控件均可用。
19
Setting File
Path
设置读取或写入控制参数文件的默认路径。
20
Change User
按该控件改变用户身份,登录成功后相应权限会发生变化。
21
Config
配置 NI PXI-7344 Board ID 及各轴与电机间对应关系。除非硬件连接发生改动请不要随意使用该控件并修改面板设置,否则可能导致系统无法正常运行。(仅有 Administrator 用户可用)
22
Exit
退出系统。
1) 运行程序,系统自动以Operator登录。
2) 系统开始对运动控制模块进行初始化,完成后弹出对话框询问是否需要载入控制参数,若选No则系统自动载入上次退出程序时的设置并使拨杆、拨片到达相应位置。若选Yes系统继续弹出对话框询问需要载入哪套平台的控制参数。选定后系统载入相应配置文件并使拨杆、拨片到达相应位置。
3) 若所测手机型号已有相应配置文件存在,跳至5)步。若该型号为初次测试,则以Engineer登录。按Initialize控件使该平台初始化。
4) 按Jog控件进入微调模式。将夹具微调至理想的起始位置和终止位置并记下对应角度值。按OK控件回到主面板并将控制参数#2、#3改为微调得到的结果。按Save Setting将当前设置存成新型号的配置文件。
5) 按Test/Continue控件开始测试。
6) 此时有3种不同情况:
① 等待翻盖次数到达控制参数#1所设上限后该平台停止运行。
② 按Stop控件停止操作,控制参数#8复0。
③ 按Pause控件暂停操作,控制参数#8保持当前值,可以调整控制参数后继续测试。
7) 按Exit控件退出测试系统。
4. 结束语
本测试系统实现了对手机翻盖的耐久性测试,相对于传统的测试系统测试速度大大提高,并提供完善灵活的用户管理和系统设置功能。通过实际生产测试表明该测试系统工作状态稳定,提高了整个生产过程的效率。
上一篇:LSD-2C智能开口闪点测定仪
下一篇:基于虚拟仪器的核能海水谈化实验测控平台
 Electric Motor Control: DC, AC, and BLDC Motors
Electric Motor Control: DC, AC, and BLDC Motors OP06GBC
OP06GBC
小广播
热门活动
换一批
更多

最新应用文章
更多精选电路图






更多热门文章
更多每日新闻
- Bourns 全新推出 11 款 Riedon™ 功率电阻产品系列
- Akamai 将微分段拓展至 Amazon Web Services 并增强 ZTNA,助力实现最佳应用程序性能
- 博世中国回应全球裁员:此次裁员不涉及中国区
- 英飞凌推出业界首款用于太空应用的QML认证512 Mbit抗辐射加固设计NOR闪存
- AI计算时代,为什么Arm独具优势?
- 美国能源部拟向 Rivian 提供 66 亿美元贷款,支持电动汽车扩产
- 国产射频芯片大厂慧智微否认大规模裁员:系小范围组织调整
- Handtmann推出容量高达1.3 MWh的电池系统 可用于重型车辆等
- 全固态电池,日系车的新希望?
- 2026年,动力电池成本将下降近50%
更多往期活动
11月27日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号