摘要: 本文介绍了虚拟仪器技术及其开发语言LabWindows/CVI, 并结合自己开发的异步电机空载试验采集处理系统讨论了虚拟仪器在电机试验领域的应用。
关键词: 虚拟仪器 LabWindows/CVI 空载试验 数据采集与处理
前言
虚拟仪器是全新概念的最新一代测量仪器,它将传统仪器由硬件电路实现的数据分析与显示功能改由功能强大的计算机及其显示器来执行,它是按照测量原理采用适当的信号分析技术和处理技术编制某种测量功能的软件就构成了该种功能的测试仪器。因此,如果我们在电机型式试验中引入虚拟仪器,利用计算机强大的处理功能,开发出完全替代真实测量工具的虚拟仪器对试验进行自动采集并实现试验的自动处理和生成报告。可以看出,虚拟仪器这一全新测量仪器在传统的电机试验应用上将带来重大影响。
虚拟仪器VI及其编程语言LabWindows/CVI
虚拟仪器(Virtual Instrument,简称VI)是现代计算机技术和仪器技术深层次的结合。随着计算机技术和仪器技术的发展,由硬件电路实现的信号处理功能正逐步由软件替代。虚拟仪器是以软件为核心,由计算机及必要的硬件组建起来的测试系统或仪器系统,在计算机上对虚拟仪器面板的操作与现实中的仪器面板操作一样。在虚拟仪器中,用户可以自己设计或定义新的理论和新的算法来适应不同的测量需求,仪器的功能更加灵活、强大,所以有“软件就是仪器”的说法。因此,虚拟仪器是计算机硬件资源、仪器与测控系统硬件资源和虚拟仪器软件资源的有效结合。
虚拟仪器的实质是利用计算机显示器模拟传统仪器的控制面板,以多种形式输出检测结果,利用计算机软件实现信号数据的运算、分析和处理,利用I/O接口设备完成信号的采集、测量和调理,从而完成各种测试功能的一种计算机仪器系统。操作者使用鼠标或键盘操作虚拟面板就如同使用一台专用测量仪器。
虚拟仪器的硬件包括计算机和I/O接口设备。计算机可以是一台PC机或者工作站,它是硬件平台的核心。I/O接口设备主要完成被测输入信号的采集、放大、模/数转换。按照总线的不同可以分为PC总线的DAQ(数据采集卡/板) 、GPIB总线仪器和VXI总线仪器等等。
虚拟仪器的编程语言有多种。LabWindows/CVI是其中最优秀的语言之一,它是美国NI(National Instruments)公司开发的32位面向计算机测控领域的软件开发平台。它以ANSI为核心,将功能强大的、使用灵活的C语言平台与数据采集、分析和表达等测控专业工具有机结合,它支持事件驱动与回调函数编程技术,它的集成化开发平台、交互式编程方法、丰富的功能面板和库函数大大增强了C语言的功能,为熟悉C的开发人员开发检测、数据采集、过程监控等系统提供了一个理想的软件开发环境。
可以看出,虚拟仪器这一适合测控领域的开发平台完全适合于电机试验领域。引入虚拟仪器将改善电机试验测量的适时性要求,提高仪器仪表的精度并可以自己开发特殊要求的仪器,利用计算机的处理功能可以实现试验后数据的自动处理和报表,当然也可以实现试验数据的数据库管理。
虚拟仪器的异步机空载试验采集处理系统
虚拟仪器的电机试验应用程序结构
以LabWindows/CVI开发平台设计的基于PC-DAQ的虚拟仪器测试系统为例,其在电机试验领域应用的系统结果如图所示:

 数据采集卡
设备驱动
虚拟仪器面板
应用程序
LabWindows/CVI函数
LabWindows/CVI平台
计算机
由传感器接受被测信号转换为电量信号,送入信号处理电路进行整形、转换和滤波处理,变成标准信号,数据采集卡采集信号处理电路的电压信号,转换为计算机能处理的数字信号,经过设备驱动程序数字信号送入计算机在LabWindows/CVI平台下调用信号处理函数,编写程序和设计虚拟仪器面板,形成不同针对试验的测量处理系统。
异步机空载采集处理系统
异步电机空载试验计算机处理的数学模型
异步电机的空载试验是在被试电机空载运行时测量三相电压、三相电流、功率,作出电压-电流、电压平方-空载损耗、电压-功率的关系曲线, 在电压-电流曲线上我们查出额定电压的空载电流值,在电压-功率的曲线上我们查出额定电压的空载损耗值,结合电压平方-空载损耗曲线分离出铁耗和风摩耗值。
因此,曲线拟合的表达式是决定我们处理空载损耗的关键。参考电机学相关书籍和实际经验,我们知道电压-电流、电压平方-空载损耗是呈直线-三次趋向关系,而电压-功率是高阶曲线函数关系。很显然,我们只需要拟合出
数据采集卡
设备驱动
虚拟仪器面板
应用程序
LabWindows/CVI函数
LabWindows/CVI平台
计算机
由传感器接受被测信号转换为电量信号,送入信号处理电路进行整形、转换和滤波处理,变成标准信号,数据采集卡采集信号处理电路的电压信号,转换为计算机能处理的数字信号,经过设备驱动程序数字信号送入计算机在LabWindows/CVI平台下调用信号处理函数,编写程序和设计虚拟仪器面板,形成不同针对试验的测量处理系统。
异步机空载采集处理系统
异步电机空载试验计算机处理的数学模型
异步电机的空载试验是在被试电机空载运行时测量三相电压、三相电流、功率,作出电压-电流、电压平方-空载损耗、电压-功率的关系曲线, 在电压-电流曲线上我们查出额定电压的空载电流值,在电压-功率的曲线上我们查出额定电压的空载损耗值,结合电压平方-空载损耗曲线分离出铁耗和风摩耗值。
因此,曲线拟合的表达式是决定我们处理空载损耗的关键。参考电机学相关书籍和实际经验,我们知道电压-电流、电压平方-空载损耗是呈直线-三次趋向关系,而电压-功率是高阶曲线函数关系。很显然,我们只需要拟合出
 个试验数据点的这三条曲线的准确表达式来,上述问题就迎刃而解。对于电压-功率的高阶曲线函数关系,LabWindows/CVI函数库提供了
个试验数据点的这三条曲线的准确表达式来,上述问题就迎刃而解。对于电压-功率的高阶曲线函数关系,LabWindows/CVI函数库提供了
 个数据点的高阶曲线拟合函数PolyFit,只需要确定或选择阶数并代入有关数据即可。因此,我们需要解决的是直线-三次拟合曲线表达式的求取。
设分段函数
个数据点的高阶曲线拟合函数PolyFit,只需要确定或选择阶数并代入有关数据即可。因此,我们需要解决的是直线-三次拟合曲线表达式的求取。
设分段函数
 曲线的连接点在
曲线的连接点在
 处。
显然,上述曲线应满足以下条件:
(1)
处。
显然,上述曲线应满足以下条件:
(1)
 在
在
 处,俩式表达式值相等,有
(2) 在
处,俩式表达式值相等,有
(2) 在
 处,俩式斜率相等,有
处,俩式斜率相等,有
 (3) 曲线要光滑,则斜率的变化率相等,即二阶倒数值相等,有
(3) 曲线要光滑,则斜率的变化率相等,即二阶倒数值相等,有
 根据上述关系,我们可以消去
根据上述关系,我们可以消去
 ,
,
 和
和
 ,得出函数与
,得出函数与
 ,
,
 ,
,
 的关系表达式。
并代入拟合曲线方程:
的关系表达式。
并代入拟合曲线方程:

 令每一观测值对拟合曲线的偏差为
令每一观测值对拟合曲线的偏差为
 则有
则有
 则
则
 我们假设共有个观测数组,
我们假设共有个观测数组,
 ,
,
 ,其中在
,其中在
 时有
时有
 个观测值,在
个观测值,在
 时有
时有
 个观测值,则
个观测值,则
 ;
则偏差平方和为:
;
则偏差平方和为:
 要使Q最小,则
要使Q最小,则
 ;
则可求出
;
则可求出
 ,有:
,有:
 其中,
其中,
 ,
,







 对于
对于
 ,可以选择
,可以选择
 为区间
为区间
 的最小值,求取直线-三次曲线,求得偏差平方和Q值,再以步长
的最小值,求取直线-三次曲线,求得偏差平方和Q值,再以步长
 变化计算不同连接点的Q值,取Q值最小的
变化计算不同连接点的Q值,取Q值最小的
 即可。
对于空载试验电压平方-空载损耗的直线-三次曲线来说,显然
即可。
对于空载试验电压平方-空载损耗的直线-三次曲线来说,显然
 的值就是风摩耗。
实际上,由于电机磁路可能饱和的关系,直线-三次拟和有可能不能更为客观真实的反映上述两条曲线的关系时,我们也提供高阶拟和函数PolyFit来替代。
异步机空载试验的虚拟仪器系统
本系统的软件是在LabWindows/CVI开发平台下实现。
数据采集是采用DAQ数据采集卡,采集通道通过daq::s!(i:j)格式确定,下面的程序为采集程序的部分:
char DaqStr34A[20] = "daq::1!(0:5)";
char DaqStr34B[20] = "daq::1!(6:11)";
SetCtrlAttribute (hMainPanel, PANEL_ReadData, ATTR_DIMMED, 1);
strcpy(channelStringA, DaqStr34A); //设置采样通道
strcpy(channelStringB, DaqStr34B);
GetCtrlVal (hMainPanel, PANEL_numCyc, %26;amp;numCyc);
numChannels=6; numScans=64;
rate=50*numScans;
DataCount= numScans * numCyc;
iTestedWaveform = (double *) malloc (DataCount * numChannels * sizeof (double));
iLoadWaveform = (double *) malloc (DataCount * numChannels * sizeof (double));
err = nidaqAIScanOp (channelStringA, numScans * numCyc, rate, upper,
lower, kNidaqGroupByChannel, %26;amp; actualRate, iTestedWaveform);
err=nidaqAIScanOp (channelStringB, numScans * numCyc, rate, upper, lower,
kNidaqGroupByChannel, %26;amp; actualRate, iLoadWaveform);
的值就是风摩耗。
实际上,由于电机磁路可能饱和的关系,直线-三次拟和有可能不能更为客观真实的反映上述两条曲线的关系时,我们也提供高阶拟和函数PolyFit来替代。
异步机空载试验的虚拟仪器系统
本系统的软件是在LabWindows/CVI开发平台下实现。
数据采集是采用DAQ数据采集卡,采集通道通过daq::s!(i:j)格式确定,下面的程序为采集程序的部分:
char DaqStr34A[20] = "daq::1!(0:5)";
char DaqStr34B[20] = "daq::1!(6:11)";
SetCtrlAttribute (hMainPanel, PANEL_ReadData, ATTR_DIMMED, 1);
strcpy(channelStringA, DaqStr34A); //设置采样通道
strcpy(channelStringB, DaqStr34B);
GetCtrlVal (hMainPanel, PANEL_numCyc, %26;amp;numCyc);
numChannels=6; numScans=64;
rate=50*numScans;
DataCount= numScans * numCyc;
iTestedWaveform = (double *) malloc (DataCount * numChannels * sizeof (double));
iLoadWaveform = (double *) malloc (DataCount * numChannels * sizeof (double));
err = nidaqAIScanOp (channelStringA, numScans * numCyc, rate, upper,
lower, kNidaqGroupByChannel, %26;amp; actualRate, iTestedWaveform);
err=nidaqAIScanOp (channelStringB, numScans * numCyc, rate, upper, lower,
kNidaqGroupByChannel, %26;amp; actualRate, iLoadWaveform);
 采集的每一点的电压电流每相值用Labwindows/CVI库自带的RMS函数进行有效值计算,再通过Mean函数计算出平均值,求取每一相的功率值。从上述仪表中可以将试验采集的数据记录保存。
Kp = 0;
for (index = 0; index < numChannels*numCyc; index++){
Copy1D (%26;amp;iTestedWaveform[Kp*numScans], numScans, Upek[index]);
RMS ( Upek[index], numScans, %26;amp; Up[index] ); //有效值计算
++Kp; //Upek:试验原始数据(行:numchannels*numcyc,列:numScans)
} //Up:numChannels*numCyc个数据,对应于原始数据的RMS
MyVal = numCyc;
Kp = 0;
for (index = 0; index < numChannels; index++){
Mean (%26;amp;Up[Kp*numCyc], numCyc, %26;amp; aUIrms[index]);
//aUIrms[0]-[5]:各Channel中各Cycle的RMS值的平均值
aUIrms[index] = aUIrms[index]*PTCT[index]; //乘以预设比例
SetCtrlVal (hTestedMotor, METERPANEL_NumU1 + index, aUIrms[index]/mtDisplay[0][index].iRat);
++Kp;} //六个电压电流值设定
}
Mean (%26;amp;aUIrms[0], 3, %26;amp; Uav); //电压平均值
Mean (%26;amp;aUIrms[3], 3, %26;amp; Iav); //电流平均值
SetCtrlVal ( hTestedMotor, METERPANEL_VOLTAGEMETER, Uav );
SetCtrlVal ( hTestedMotor, METERPANEL_CurrentMeter, Iav );
MyVal = numScans;
for (kk = 0; kk < 3*numCyc; kk++) //功率计算
DotProduct (Upek[kk], Upek[kk+3*numCyc], numScans, %26;amp;PP[kk]);
Kp = 0;
for (index = 0; index < numChannels/2; index++){
Mean (%26;amp; PP[Kp*numCyc], numCyc, %26;amp;aUIrms[6+index]);
//aUIrms[6]-[9]:三个周期功率平均
aUIrms[6+index] = PTCT[index]*PTCT[index+3]*aUIrms[6+index]/MyVal; //各点功率
SetCtrlVal (hTestedMotor,METERPANEL_NumP1+index, aUIrms[6+index]);
++Kp;
}
通过编写处理函数就可以实现对于试验数据的自动处理。根据空载试验处理的数学模型,我们编写直线-三次拟合函数
void linefit13(int datanum, double x[], double y[], double *p, double eps)
采集的每一点的电压电流每相值用Labwindows/CVI库自带的RMS函数进行有效值计算,再通过Mean函数计算出平均值,求取每一相的功率值。从上述仪表中可以将试验采集的数据记录保存。
Kp = 0;
for (index = 0; index < numChannels*numCyc; index++){
Copy1D (%26;amp;iTestedWaveform[Kp*numScans], numScans, Upek[index]);
RMS ( Upek[index], numScans, %26;amp; Up[index] ); //有效值计算
++Kp; //Upek:试验原始数据(行:numchannels*numcyc,列:numScans)
} //Up:numChannels*numCyc个数据,对应于原始数据的RMS
MyVal = numCyc;
Kp = 0;
for (index = 0; index < numChannels; index++){
Mean (%26;amp;Up[Kp*numCyc], numCyc, %26;amp; aUIrms[index]);
//aUIrms[0]-[5]:各Channel中各Cycle的RMS值的平均值
aUIrms[index] = aUIrms[index]*PTCT[index]; //乘以预设比例
SetCtrlVal (hTestedMotor, METERPANEL_NumU1 + index, aUIrms[index]/mtDisplay[0][index].iRat);
++Kp;} //六个电压电流值设定
}
Mean (%26;amp;aUIrms[0], 3, %26;amp; Uav); //电压平均值
Mean (%26;amp;aUIrms[3], 3, %26;amp; Iav); //电流平均值
SetCtrlVal ( hTestedMotor, METERPANEL_VOLTAGEMETER, Uav );
SetCtrlVal ( hTestedMotor, METERPANEL_CurrentMeter, Iav );
MyVal = numScans;
for (kk = 0; kk < 3*numCyc; kk++) //功率计算
DotProduct (Upek[kk], Upek[kk+3*numCyc], numScans, %26;amp;PP[kk]);
Kp = 0;
for (index = 0; index < numChannels/2; index++){
Mean (%26;amp; PP[Kp*numCyc], numCyc, %26;amp;aUIrms[6+index]);
//aUIrms[6]-[9]:三个周期功率平均
aUIrms[6+index] = PTCT[index]*PTCT[index+3]*aUIrms[6+index]/MyVal; //各点功率
SetCtrlVal (hTestedMotor,METERPANEL_NumP1+index, aUIrms[6+index]);
++Kp;
}
通过编写处理函数就可以实现对于试验数据的自动处理。根据空载试验处理的数学模型,我们编写直线-三次拟合函数
void linefit13(int datanum, double x[], double y[], double *p, double eps)
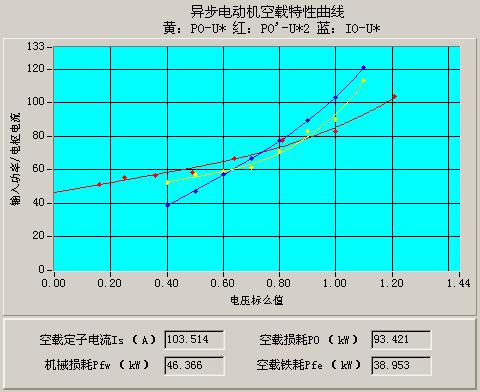 对试验数据进行曲线拟合,计算出给最后结果数据。曲线的绘制我们用库函数PlotXY输出显示在控件Graph中。如图,最后的结果数据同手工计算的结果数据定子电流103.2A,空载损耗93.424kW,铁耗37.682kW,风摩耗48.165kW相比还是比较精确的。
结束语
可以看出,将虚拟仪器引入电机的型式试验将给试验带来重要影响。利用传感器测量克服了传统测量方法的不便,减小了传统测量仪器的精度对于试验的影响,试验的自动采集使得试验采集的数据更具实时性,试验的自动处理也减小了人的劳动量、提高了效率和准确性,我们还可以利用计算机进行报表的自动生成和试验数据的数据库管理。虚拟仪器大大提高了电机型式试验的自动化过程。
参考文献
1.《基于LabWindows/CVI的虚拟仪器设计》 刘君华主编,电子工业出版社,2003年
2.《虚拟仪器编程语言LabWindows/CVI教程》 刘君华主编,电子工业出版社,2001年
3.《电机测试技术》 何秀伟 ,机械工业出版社,1995年
对试验数据进行曲线拟合,计算出给最后结果数据。曲线的绘制我们用库函数PlotXY输出显示在控件Graph中。如图,最后的结果数据同手工计算的结果数据定子电流103.2A,空载损耗93.424kW,铁耗37.682kW,风摩耗48.165kW相比还是比较精确的。
结束语
可以看出,将虚拟仪器引入电机的型式试验将给试验带来重要影响。利用传感器测量克服了传统测量方法的不便,减小了传统测量仪器的精度对于试验的影响,试验的自动采集使得试验采集的数据更具实时性,试验的自动处理也减小了人的劳动量、提高了效率和准确性,我们还可以利用计算机进行报表的自动生成和试验数据的数据库管理。虚拟仪器大大提高了电机型式试验的自动化过程。
参考文献
1.《基于LabWindows/CVI的虚拟仪器设计》 刘君华主编,电子工业出版社,2003年
2.《虚拟仪器编程语言LabWindows/CVI教程》 刘君华主编,电子工业出版社,2001年
3.《电机测试技术》 何秀伟 ,机械工业出版社,1995年
引用地址:异步电机空载试验的虚拟仪器采集处理系统
数据采集卡
设备驱动
虚拟仪器面板
应用程序
LabWindows/CVI函数
LabWindows/CVI平台
计算机
由传感器接受被测信号转换为电量信号,送入信号处理电路进行整形、转换和滤波处理,变成标准信号,数据采集卡采集信号处理电路的电压信号,转换为计算机能处理的数字信号,经过设备驱动程序数字信号送入计算机在LabWindows/CVI平台下调用信号处理函数,编写程序和设计虚拟仪器面板,形成不同针对试验的测量处理系统。
异步机空载采集处理系统
异步电机空载试验计算机处理的数学模型
异步电机的空载试验是在被试电机空载运行时测量三相电压、三相电流、功率,作出电压-电流、电压平方-空载损耗、电压-功率的关系曲线, 在电压-电流曲线上我们查出额定电压的空载电流值,在电压-功率的曲线上我们查出额定电压的空载损耗值,结合电压平方-空载损耗曲线分离出铁耗和风摩耗值。
因此,曲线拟合的表达式是决定我们处理空载损耗的关键。参考电机学相关书籍和实际经验,我们知道电压-电流、电压平方-空载损耗是呈直线-三次趋向关系,而电压-功率是高阶曲线函数关系。很显然,我们只需要拟合出
个试验数据点的这三条曲线的准确表达式来,上述问题就迎刃而解。对于电压-功率的高阶曲线函数关系,LabWindows/CVI函数库提供了
个数据点的高阶曲线拟合函数PolyFit,只需要确定或选择阶数并代入有关数据即可。因此,我们需要解决的是直线-三次拟合曲线表达式的求取。
设分段函数
曲线的连接点在
处。
显然,上述曲线应满足以下条件:
(1)
在
处,俩式表达式值相等,有
(2) 在
处,俩式斜率相等,有
(3) 曲线要光滑,则斜率的变化率相等,即二阶倒数值相等,有
根据上述关系,我们可以消去
,
和
,得出函数与
,
,
的关系表达式。
并代入拟合曲线方程:
令每一观测值对拟合曲线的偏差为
则有
则
我们假设共有个观测数组,
,
,其中在
时有
个观测值,在
时有
个观测值,则
;
则偏差平方和为:
要使Q最小,则
;
则可求出
,有:
其中,
,
对于
,可以选择
为区间
的最小值,求取直线-三次曲线,求得偏差平方和Q值,再以步长
变化计算不同连接点的Q值,取Q值最小的
即可。
对于空载试验电压平方-空载损耗的直线-三次曲线来说,显然
的值就是风摩耗。
实际上,由于电机磁路可能饱和的关系,直线-三次拟和有可能不能更为客观真实的反映上述两条曲线的关系时,我们也提供高阶拟和函数PolyFit来替代。
异步机空载试验的虚拟仪器系统
本系统的软件是在LabWindows/CVI开发平台下实现。
数据采集是采用DAQ数据采集卡,采集通道通过daq::s!(i:j)格式确定,下面的程序为采集程序的部分:
char DaqStr34A[20] = "daq::1!(0:5)";
char DaqStr34B[20] = "daq::1!(6:11)";
SetCtrlAttribute (hMainPanel, PANEL_ReadData, ATTR_DIMMED, 1);
strcpy(channelStringA, DaqStr34A); //设置采样通道
strcpy(channelStringB, DaqStr34B);
GetCtrlVal (hMainPanel, PANEL_numCyc, %26;amp;numCyc);
numChannels=6; numScans=64;
rate=50*numScans;
DataCount= numScans * numCyc;
iTestedWaveform = (double *) malloc (DataCount * numChannels * sizeof (double));
iLoadWaveform = (double *) malloc (DataCount * numChannels * sizeof (double));
err = nidaqAIScanOp (channelStringA, numScans * numCyc, rate, upper,
lower, kNidaqGroupByChannel, %26;amp; actualRate, iTestedWaveform);
err=nidaqAIScanOp (channelStringB, numScans * numCyc, rate, upper, lower,
kNidaqGroupByChannel, %26;amp; actualRate, iLoadWaveform);
采集的每一点的电压电流每相值用Labwindows/CVI库自带的RMS函数进行有效值计算,再通过Mean函数计算出平均值,求取每一相的功率值。从上述仪表中可以将试验采集的数据记录保存。
Kp = 0;
for (index = 0; index < numChannels*numCyc; index++){
Copy1D (%26;amp;iTestedWaveform[Kp*numScans], numScans, Upek[index]);
RMS ( Upek[index], numScans, %26;amp; Up[index] ); //有效值计算
++Kp; //Upek:试验原始数据(行:numchannels*numcyc,列:numScans)
} //Up:numChannels*numCyc个数据,对应于原始数据的RMS
MyVal = numCyc;
Kp = 0;
for (index = 0; index < numChannels; index++){
Mean (%26;amp;Up[Kp*numCyc], numCyc, %26;amp; aUIrms[index]);
//aUIrms[0]-[5]:各Channel中各Cycle的RMS值的平均值
aUIrms[index] = aUIrms[index]*PTCT[index]; //乘以预设比例
SetCtrlVal (hTestedMotor, METERPANEL_NumU1 + index, aUIrms[index]/mtDisplay[0][index].iRat);
++Kp;} //六个电压电流值设定
}
Mean (%26;amp;aUIrms[0], 3, %26;amp; Uav); //电压平均值
Mean (%26;amp;aUIrms[3], 3, %26;amp; Iav); //电流平均值
SetCtrlVal ( hTestedMotor, METERPANEL_VOLTAGEMETER, Uav );
SetCtrlVal ( hTestedMotor, METERPANEL_CurrentMeter, Iav );
MyVal = numScans;
for (kk = 0; kk < 3*numCyc; kk++) //功率计算
DotProduct (Upek[kk], Upek[kk+3*numCyc], numScans, %26;amp;PP[kk]);
Kp = 0;
for (index = 0; index < numChannels/2; index++){
Mean (%26;amp; PP[Kp*numCyc], numCyc, %26;amp;aUIrms[6+index]);
//aUIrms[6]-[9]:三个周期功率平均
aUIrms[6+index] = PTCT[index]*PTCT[index+3]*aUIrms[6+index]/MyVal; //各点功率
SetCtrlVal (hTestedMotor,METERPANEL_NumP1+index, aUIrms[6+index]);
++Kp;
}
通过编写处理函数就可以实现对于试验数据的自动处理。根据空载试验处理的数学模型,我们编写直线-三次拟合函数
void linefit13(int datanum, double x[], double y[], double *p, double eps)
对试验数据进行曲线拟合,计算出给最后结果数据。曲线的绘制我们用库函数PlotXY输出显示在控件Graph中。如图,最后的结果数据同手工计算的结果数据定子电流103.2A,空载损耗93.424kW,铁耗37.682kW,风摩耗48.165kW相比还是比较精确的。
结束语
可以看出,将虚拟仪器引入电机的型式试验将给试验带来重要影响。利用传感器测量克服了传统测量方法的不便,减小了传统测量仪器的精度对于试验的影响,试验的自动采集使得试验采集的数据更具实时性,试验的自动处理也减小了人的劳动量、提高了效率和准确性,我们还可以利用计算机进行报表的自动生成和试验数据的数据库管理。虚拟仪器大大提高了电机型式试验的自动化过程。
参考文献
1.《基于LabWindows/CVI的虚拟仪器设计》 刘君华主编,电子工业出版社,2003年
2.《虚拟仪器编程语言LabWindows/CVI教程》 刘君华主编,电子工业出版社,2001年
3.《电机测试技术》 何秀伟 ,机械工业出版社,1995年
上一篇:数字滤波器滤除电子测量系统中工频及其谐波干扰的研究
下一篇:激光多普勒流速测量技术
 嵌入式网络那些事:LwIP协议深度剖析与实战演练
嵌入式网络那些事:LwIP协议深度剖析与实战演练 LT6700CS6-2#TR
LT6700CS6-2#TR
小广播
热门活动
换一批
更多

最新应用文章
更多精选电路图






更多热门文章
更多每日新闻
- 柔灵科技陈涵:将小型、柔性的脑机接口睡眠设备,做到千家万户
- 微灵医疗李骁健:脑机接口技术正在开启意识与AI融合的新纪元
- USB Type-C® 和 USB Power Delivery:专为扩展功率范围和电池供电型系统而设计
- 景昱医疗耿东:脑机接口DBS治疗技术已实现国产替代
- 首都医科大学王长明:针对癫痫的数字疗法已进入使用阶段
- 非常见问题解答第223期:如何在没有软启动方程的情况下测量和确定软启动时序?
- 兆易创新GD25/55全系列车规级SPI NOR Flash荣获ISO 26262 ASIL D功能安全认证证书
- 新型IsoVu™ 隔离电流探头:为电流测量带来全新维度
- 英飞凌推出简化电机控制开发的ModusToolbox™电机套件
- 意法半导体IO-Link执行器电路板为工业监控和设备厂商带来一站式参考设计
更多往期活动
11月22日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号