摘 要:基于DSP的数字控制逐渐和电力电子应用紧密结合,功率因数校正是电力电子技术的一个重要应用,利用Motorola新型号MC56F8323的高性能特性,完成了基于DSP的功率因数校正应用模块研究,给出了详细的系统设计和控制参数。最后用一台500W实验样机验证了数字控制所带来的优良的系统性能。
关键词:功率因数校正;数字信号处理;PI控制
0 引言
电力电子变换技术是随着电力半导体器件的发展而发展的。随着计算机和信息技术的飞速发展,数字信号处理技术应运而生,并得到了迅速的发展。数字控制由于其控制理沦与实施手段的不断完善,且阅为其具有高度集成化的控制电路、精确的控制精度、以及稳定的工作性能,如今已成为功率电子学的一个重要研究方向,而且数字控制也是最终实现电源模块化、集成化、数字化、绿色化的有效手段。
功率因数校正作为电力电子功率变换的一种典型应用,具有广泛的工程应用价值,本文研究的内容是在Moturola的MC56F8323所构成的数字控制硬件基础上,对数字化控制的功率因数校正应用模块进行了研究,将数字化控制应用到高频开关的功率因数校正领域。
l 单相功率因数校正技术
功率因数PF(Power Factor)的定义是交流输入有功功率P与输入视在功率S之比,其表达式为
 式中:Vrms是电网电压的有效值;
Irms是电网电流的有效值;
V1rms是电网基波电压有效值,在以下的讨论中,都认为电网电压是理想的正弦波,即Vrms=V1rms。
I1rms是电网基波电流有效值;cosΦ是基波电压电流的相移因数(displacement factor):
γ=I1rms/Irms是电网电流的失真因数(distonlon factor)。
因此,功率因数PF又可以定义为电流失真因数和相移因数的乘积。
单管Boost型PFC电路是现在实际工程应用中最为广泛的一种有源功率因数校正电路,其电路工作框图如图1所示。主电路由不可控整流电路、电感、开关管和滤波电容组成。其输入侧有储能电感L,可以减小输入电流纹波,防止电网对主电路高频瞬态冲击,且可减少对输入滤波器的要求,对整流器呈现电流源负载特性;其输出侧有滤波电容,可以减小输出电压的纹波,对负载呈现电压源特性。
式中:Vrms是电网电压的有效值;
Irms是电网电流的有效值;
V1rms是电网基波电压有效值,在以下的讨论中,都认为电网电压是理想的正弦波,即Vrms=V1rms。
I1rms是电网基波电流有效值;cosΦ是基波电压电流的相移因数(displacement factor):
γ=I1rms/Irms是电网电流的失真因数(distonlon factor)。
因此,功率因数PF又可以定义为电流失真因数和相移因数的乘积。
单管Boost型PFC电路是现在实际工程应用中最为广泛的一种有源功率因数校正电路,其电路工作框图如图1所示。主电路由不可控整流电路、电感、开关管和滤波电容组成。其输入侧有储能电感L,可以减小输入电流纹波,防止电网对主电路高频瞬态冲击,且可减少对输入滤波器的要求,对整流器呈现电流源负载特性;其输出侧有滤波电容,可以减小输出电压的纹波,对负载呈现电压源特性。
 从前面的分析可知,PFC电路主要完成两方面任务:
1)控制电感电流,尽量使输入电流接近正弦,保证其γ接近于1,并使输入电流基波跟随输入电压相位;
2)控制输出电压,使输出电压保持恒定。
因此需要两个控制环进行控制,电压环是外环,采样输出电压,保持输出电压恒定;电流环是内环,采样电感电流,迫使电感电流跟踪电流给定,减小输入电流谐波。
2 基于数字控制功率因数校正模块的系统框架
数字化使得电力电子变换控制更为灵活,在CPU计算速度允许的情况下,可以实现模拟控制难以做到的复杂控制算法,用户可以根据自己的系统需求,方便地更改控制器参数,即便是在控制对象改变的情况下,也不需要对控制器硬件做修改,只要改变某些软件参数即可,从而大大增强了系统的硬件兼容性。另一方向,数字电路不易受到外界环境的干扰,增强了系统的可靠性。
但是,数字控制所采用的CPU计算速度决定厂数字控制系统的适用场合,现在数字控制多被用于计算速度要求不太苛刻的场合,例如,UPS和逆变器控制等,计算频率一般小于20 kHz。控制频率大于100 kHz的高频功率变换现在主要还是采用模拟器件控制,这主要是受到CPU计算速度的限制。本文采用Motorola公司的新型DSP芯片MC56F8323,将数字控制引入到高频有源功率因数校正的控制之中,完成了基于数字控制的功率因数校正模块应用,并取得厂良好的控制效果。
基于MC56F823的PUC模块系统框图如图2所示,主电路采用传统的单管Boost的功率拓朴结构,由主功率管S,升压二极管D,储能电感L以及输出电容C组成,输入侧还包括输入EMI滤波,输入继电器以及二极管全波整流电路。全波整流电压Vrect,输入电流Iin,和输出直流母线电压Vbus三个模拟变量送至DSP模数转换。本文的数字调节器均采用PI算法。从图2中可以看出,数字PFC
采用双环控制,外环电压环速度较慢,输出的直流母线电压经采样与输出电压的给定值相比较,经电压环PI调节器G1,输出表示为a。
G1的传递函数为
从前面的分析可知,PFC电路主要完成两方面任务:
1)控制电感电流,尽量使输入电流接近正弦,保证其γ接近于1,并使输入电流基波跟随输入电压相位;
2)控制输出电压,使输出电压保持恒定。
因此需要两个控制环进行控制,电压环是外环,采样输出电压,保持输出电压恒定;电流环是内环,采样电感电流,迫使电感电流跟踪电流给定,减小输入电流谐波。
2 基于数字控制功率因数校正模块的系统框架
数字化使得电力电子变换控制更为灵活,在CPU计算速度允许的情况下,可以实现模拟控制难以做到的复杂控制算法,用户可以根据自己的系统需求,方便地更改控制器参数,即便是在控制对象改变的情况下,也不需要对控制器硬件做修改,只要改变某些软件参数即可,从而大大增强了系统的硬件兼容性。另一方向,数字电路不易受到外界环境的干扰,增强了系统的可靠性。
但是,数字控制所采用的CPU计算速度决定厂数字控制系统的适用场合,现在数字控制多被用于计算速度要求不太苛刻的场合,例如,UPS和逆变器控制等,计算频率一般小于20 kHz。控制频率大于100 kHz的高频功率变换现在主要还是采用模拟器件控制,这主要是受到CPU计算速度的限制。本文采用Motorola公司的新型DSP芯片MC56F8323,将数字控制引入到高频有源功率因数校正的控制之中,完成了基于数字控制的功率因数校正模块应用,并取得厂良好的控制效果。
基于MC56F823的PUC模块系统框图如图2所示,主电路采用传统的单管Boost的功率拓朴结构,由主功率管S,升压二极管D,储能电感L以及输出电容C组成,输入侧还包括输入EMI滤波,输入继电器以及二极管全波整流电路。全波整流电压Vrect,输入电流Iin,和输出直流母线电压Vbus三个模拟变量送至DSP模数转换。本文的数字调节器均采用PI算法。从图2中可以看出,数字PFC
采用双环控制,外环电压环速度较慢,输出的直流母线电压经采样与输出电压的给定值相比较,经电压环PI调节器G1,输出表示为a。
G1的传递函数为

 式中:Kpv为电压环比例系数;
kiv为电压环积分系数。
a要与另外两个量b和c相乘,作为内环电流环的给定Iref,即
式中:Kpv为电压环比例系数;
kiv为电压环积分系数。
a要与另外两个量b和c相乘,作为内环电流环的给定Iref,即
 即输入全波整流电压Vrect平均值平方的倒数,c即为输入全波整流电压,这样,电压环PI调节器的输出a决定了电流环给定的幅值,输入全波整流电压的采样值c决定了电流环给定的形状,前馈电压控制的引入b保证了输入功率恒定,不受输入电网电压变化的影响。内环电流环的速度较快,将输入电流采样值与电流环给定相比较,经电流环的PI调节器G2产生变化的占空比参数,最后通过PWMO给出主功率开关管控制波形。
G2的传递函数为
即输入全波整流电压Vrect平均值平方的倒数,c即为输入全波整流电压,这样,电压环PI调节器的输出a决定了电流环给定的幅值,输入全波整流电压的采样值c决定了电流环给定的形状,前馈电压控制的引入b保证了输入功率恒定,不受输入电网电压变化的影响。内环电流环的速度较快,将输入电流采样值与电流环给定相比较,经电流环的PI调节器G2产生变化的占空比参数,最后通过PWMO给出主功率开关管控制波形。
G2的传递函数为
 式中:Kpi为电流环比例系数;
Kii为电流环积分系数。
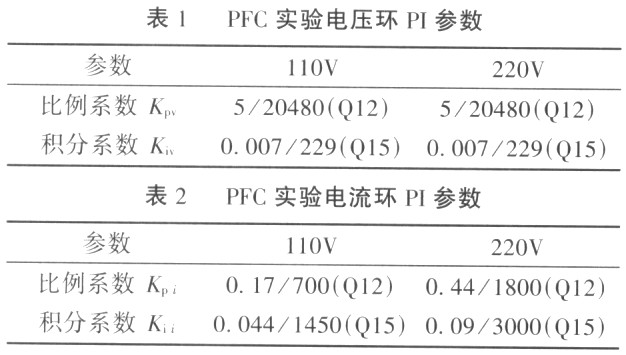
在进行MATLAB仿真后,可以得到电压环、电流环的各个控制系数,在仿真初值的基础上,进行大量的实验调试,最后各个控制参数如表1及表2所列。为了保证在输入电压大范围变化时系统性能始终达到最佳态,当输入电压有效值为11OV和220V时电流环分别采用不同的PT参数,这也是模拟控制所无法做到的。
式中:Kpi为电流环比例系数;
Kii为电流环积分系数。
在进行MATLAB仿真后,可以得到电压环、电流环的各个控制系数,在仿真初值的基础上,进行大量的实验调试,最后各个控制参数如表1及表2所列。为了保证在输入电压大范围变化时系统性能始终达到最佳态,当输入电压有效值为11OV和220V时电流环分别采用不同的PT参数,这也是模拟控制所无法做到的。
 由于DSP的控制是一种离散的数字控制,它只能根据采样时刻的偏差值计算控制量,因此,必须对上式进行离散化处理,用一系列采样时刻点k代表连续的时间t,离散的PI控制算法表达式为
由于DSP的控制是一种离散的数字控制,它只能根据采样时刻的偏差值计算控制量,因此,必须对上式进行离散化处理,用一系列采样时刻点k代表连续的时间t,离散的PI控制算法表达式为
 式中:k=0,1,2……表示采样序列;
u(k)表示第k次采样时刻PI调节器的输出值;
e(k)表示第k次采样时刻输入的偏差值;
Ts表示采样周期;
TI表示积分时间常数;
Kp为比例系数;
Ki为积分系数。
数字控制程序是由主程序和中断服务子程序组成,主要的功能模块包括电压环计算、电流环计算、PWM输出刷新以及故障保护等中断模块,其软件系统结构如表3所列。
式中:k=0,1,2……表示采样序列;
u(k)表示第k次采样时刻PI调节器的输出值;
e(k)表示第k次采样时刻输入的偏差值;
Ts表示采样周期;
TI表示积分时间常数;
Kp为比例系数;
Ki为积分系数。
数字控制程序是由主程序和中断服务子程序组成,主要的功能模块包括电压环计算、电流环计算、PWM输出刷新以及故障保护等中断模块,其软件系统结构如表3所列。
 3 系统实验
本文在基于MC56F8323的数字平台上对一台500W的PFC电路模块样机进行了实验验证,证明了在高频功率变换应用中,使用数字控制不仅可以完成传统模拟控制功能,而且在全输入范围内都能保持较高的功率因数,具有更佳的系统性能。
MC56F8323的基本特征与资源利用情况如表4所列。样机的输入电压范围为全球通用交流输入,即输入电压范围设计为AC85"265v,图3为输入电压有效值为110V,输出满载时的输入电压和输入电流波形,其中通道1为电压波形,通道2为电流采样波形。电压的采样比例为1:500,电流采样的比例为1:lO,此时输入电流THD为8.6%,输入功率因数为0.994;图4为输入电压有效值为220V,输出满载时的输入电压和电流波形,通道说明和采样比例同前,此时输入电流THD为10.5%,输入功率因数为0.994。实验表明当输出满载功率不变时,输入电压在AC 85"265V的范围内变化时,输入电流无论是波形还是相位都跟踪输入电压波形,数字PFC控制始终可以使电路保持很高的功率因数。
3 系统实验
本文在基于MC56F8323的数字平台上对一台500W的PFC电路模块样机进行了实验验证,证明了在高频功率变换应用中,使用数字控制不仅可以完成传统模拟控制功能,而且在全输入范围内都能保持较高的功率因数,具有更佳的系统性能。
MC56F8323的基本特征与资源利用情况如表4所列。样机的输入电压范围为全球通用交流输入,即输入电压范围设计为AC85"265v,图3为输入电压有效值为110V,输出满载时的输入电压和输入电流波形,其中通道1为电压波形,通道2为电流采样波形。电压的采样比例为1:500,电流采样的比例为1:lO,此时输入电流THD为8.6%,输入功率因数为0.994;图4为输入电压有效值为220V,输出满载时的输入电压和电流波形,通道说明和采样比例同前,此时输入电流THD为10.5%,输入功率因数为0.994。实验表明当输出满载功率不变时,输入电压在AC 85"265V的范围内变化时,输入电流无论是波形还是相位都跟踪输入电压波形,数字PFC控制始终可以使电路保持很高的功率因数。

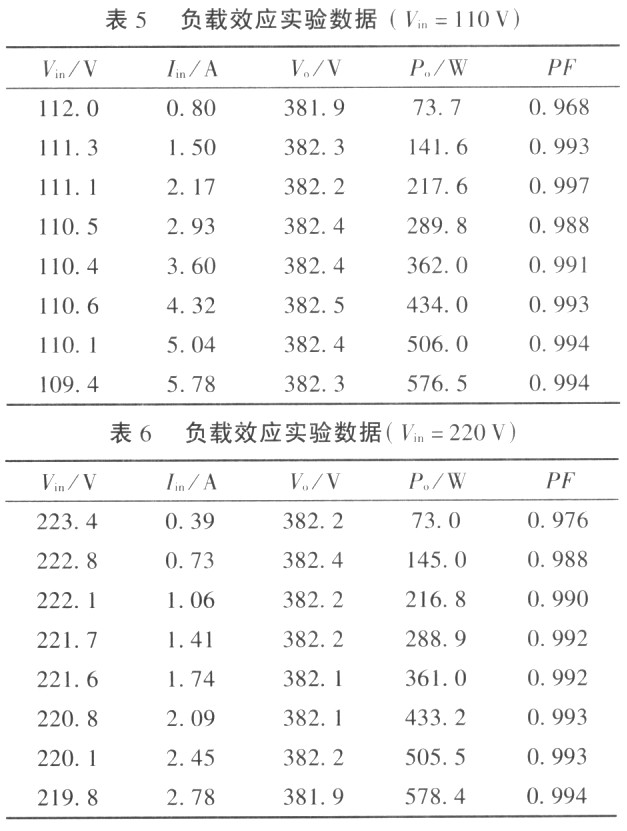 表5和表6分别为输入电压在110V和220V情况下,输出负载变化时的实验数据,从这些数据可以看出,当负载从满载到空载变化时,输出电压保持恒定不变,输入功率因数始终都维持在较高水平。实验表明该数字控制的功率因数校正系统在较大负载变化范围内均有较好的性能。
4 结语
数字控制已成为电力电子研究领域的一个重要发展方向,基于DSP的控制技术在电力电子领域的运用也逐渐普及并受到市场的充分肯定。数字控制在功率因数校正模块中的应用研究,不仅给出了完整的功率因数校正中的DSP控制解决方案,而且将DSP控制与电力电子专业应用更紧密地结合在一起,为电力电子设汁提供了一种新思路。本文首先给出了基于MC56F8323的功率因数校正应用的控制原理以及设计方法,最后做出了一台500W数字功率因数校正模块样机,并用实验验证了数字控制系统的优良性能。
表5和表6分别为输入电压在110V和220V情况下,输出负载变化时的实验数据,从这些数据可以看出,当负载从满载到空载变化时,输出电压保持恒定不变,输入功率因数始终都维持在较高水平。实验表明该数字控制的功率因数校正系统在较大负载变化范围内均有较好的性能。
4 结语
数字控制已成为电力电子研究领域的一个重要发展方向,基于DSP的控制技术在电力电子领域的运用也逐渐普及并受到市场的充分肯定。数字控制在功率因数校正模块中的应用研究,不仅给出了完整的功率因数校正中的DSP控制解决方案,而且将DSP控制与电力电子专业应用更紧密地结合在一起,为电力电子设汁提供了一种新思路。本文首先给出了基于MC56F8323的功率因数校正应用的控制原理以及设计方法,最后做出了一台500W数字功率因数校正模块样机,并用实验验证了数字控制系统的优良性能。
引用地址:基于MC56F8323的单相功率因数校正模块的应用
式中:Vrms是电网电压的有效值;
Irms是电网电流的有效值;
V1rms是电网基波电压有效值,在以下的讨论中,都认为电网电压是理想的正弦波,即Vrms=V1rms。
I1rms是电网基波电流有效值;cosΦ是基波电压电流的相移因数(displacement factor):
γ=I1rms/Irms是电网电流的失真因数(distonlon factor)。
因此,功率因数PF又可以定义为电流失真因数和相移因数的乘积。
单管Boost型PFC电路是现在实际工程应用中最为广泛的一种有源功率因数校正电路,其电路工作框图如图1所示。主电路由不可控整流电路、电感、开关管和滤波电容组成。其输入侧有储能电感L,可以减小输入电流纹波,防止电网对主电路高频瞬态冲击,且可减少对输入滤波器的要求,对整流器呈现电流源负载特性;其输出侧有滤波电容,可以减小输出电压的纹波,对负载呈现电压源特性。
从前面的分析可知,PFC电路主要完成两方面任务:
1)控制电感电流,尽量使输入电流接近正弦,保证其γ接近于1,并使输入电流基波跟随输入电压相位;
2)控制输出电压,使输出电压保持恒定。
因此需要两个控制环进行控制,电压环是外环,采样输出电压,保持输出电压恒定;电流环是内环,采样电感电流,迫使电感电流跟踪电流给定,减小输入电流谐波。
2 基于数字控制功率因数校正模块的系统框架
数字化使得电力电子变换控制更为灵活,在CPU计算速度允许的情况下,可以实现模拟控制难以做到的复杂控制算法,用户可以根据自己的系统需求,方便地更改控制器参数,即便是在控制对象改变的情况下,也不需要对控制器硬件做修改,只要改变某些软件参数即可,从而大大增强了系统的硬件兼容性。另一方向,数字电路不易受到外界环境的干扰,增强了系统的可靠性。
但是,数字控制所采用的CPU计算速度决定厂数字控制系统的适用场合,现在数字控制多被用于计算速度要求不太苛刻的场合,例如,UPS和逆变器控制等,计算频率一般小于20 kHz。控制频率大于100 kHz的高频功率变换现在主要还是采用模拟器件控制,这主要是受到CPU计算速度的限制。本文采用Motorola公司的新型DSP芯片MC56F8323,将数字控制引入到高频有源功率因数校正的控制之中,完成了基于数字控制的功率因数校正模块应用,并取得厂良好的控制效果。
基于MC56F823的PUC模块系统框图如图2所示,主电路采用传统的单管Boost的功率拓朴结构,由主功率管S,升压二极管D,储能电感L以及输出电容C组成,输入侧还包括输入EMI滤波,输入继电器以及二极管全波整流电路。全波整流电压Vrect,输入电流Iin,和输出直流母线电压Vbus三个模拟变量送至DSP模数转换。本文的数字调节器均采用PI算法。从图2中可以看出,数字PFC
采用双环控制,外环电压环速度较慢,输出的直流母线电压经采样与输出电压的给定值相比较,经电压环PI调节器G1,输出表示为a。
G1的传递函数为
式中:Kpv为电压环比例系数;
kiv为电压环积分系数。
a要与另外两个量b和c相乘,作为内环电流环的给定Iref,即
即输入全波整流电压Vrect平均值平方的倒数,c即为输入全波整流电压,这样,电压环PI调节器的输出a决定了电流环给定的幅值,输入全波整流电压的采样值c决定了电流环给定的形状,前馈电压控制的引入b保证了输入功率恒定,不受输入电网电压变化的影响。内环电流环的速度较快,将输入电流采样值与电流环给定相比较,经电流环的PI调节器G2产生变化的占空比参数,最后通过PWMO给出主功率开关管控制波形。
G2的传递函数为
式中:Kpi为电流环比例系数;
Kii为电流环积分系数。
在进行MATLAB仿真后,可以得到电压环、电流环的各个控制系数,在仿真初值的基础上,进行大量的实验调试,最后各个控制参数如表1及表2所列。为了保证在输入电压大范围变化时系统性能始终达到最佳态,当输入电压有效值为11OV和220V时电流环分别采用不同的PT参数,这也是模拟控制所无法做到的。
由于DSP的控制是一种离散的数字控制,它只能根据采样时刻的偏差值计算控制量,因此,必须对上式进行离散化处理,用一系列采样时刻点k代表连续的时间t,离散的PI控制算法表达式为
式中:k=0,1,2……表示采样序列;
u(k)表示第k次采样时刻PI调节器的输出值;
e(k)表示第k次采样时刻输入的偏差值;
Ts表示采样周期;
TI表示积分时间常数;
Kp为比例系数;
Ki为积分系数。
数字控制程序是由主程序和中断服务子程序组成,主要的功能模块包括电压环计算、电流环计算、PWM输出刷新以及故障保护等中断模块,其软件系统结构如表3所列。
3 系统实验
本文在基于MC56F8323的数字平台上对一台500W的PFC电路模块样机进行了实验验证,证明了在高频功率变换应用中,使用数字控制不仅可以完成传统模拟控制功能,而且在全输入范围内都能保持较高的功率因数,具有更佳的系统性能。
MC56F8323的基本特征与资源利用情况如表4所列。样机的输入电压范围为全球通用交流输入,即输入电压范围设计为AC85"265v,图3为输入电压有效值为110V,输出满载时的输入电压和输入电流波形,其中通道1为电压波形,通道2为电流采样波形。电压的采样比例为1:500,电流采样的比例为1:lO,此时输入电流THD为8.6%,输入功率因数为0.994;图4为输入电压有效值为220V,输出满载时的输入电压和电流波形,通道说明和采样比例同前,此时输入电流THD为10.5%,输入功率因数为0.994。实验表明当输出满载功率不变时,输入电压在AC 85"265V的范围内变化时,输入电流无论是波形还是相位都跟踪输入电压波形,数字PFC控制始终可以使电路保持很高的功率因数。
表5和表6分别为输入电压在110V和220V情况下,输出负载变化时的实验数据,从这些数据可以看出,当负载从满载到空载变化时,输出电压保持恒定不变,输入功率因数始终都维持在较高水平。实验表明该数字控制的功率因数校正系统在较大负载变化范围内均有较好的性能。
4 结语
数字控制已成为电力电子研究领域的一个重要发展方向,基于DSP的控制技术在电力电子领域的运用也逐渐普及并受到市场的充分肯定。数字控制在功率因数校正模块中的应用研究,不仅给出了完整的功率因数校正中的DSP控制解决方案,而且将DSP控制与电力电子专业应用更紧密地结合在一起,为电力电子设汁提供了一种新思路。本文首先给出了基于MC56F8323的功率因数校正应用的控制原理以及设计方法,最后做出了一台500W数字功率因数校正模块样机,并用实验验证了数字控制系统的优良性能。
上一篇:集电压/电流变换器XTR110及其应用
下一篇:便携产品电源芯片的应用技术
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 MAX478CPA+
MAX478CPA+










 京公网安备 11010802033920号
京公网安备 11010802033920号