摘要:分析了电流型滞环调制和单极性SPWM倍频调制逆变器的原理,然后讨论了两种调制方式下输出滤波器的设计,并在此基础上制作了两台6kV%26;#183;A逆变器样机并给出了输出波形和输出THD。通过理论分析和实验结果可知电流型滞环调制的逆变器稳定性要优于SPWM调制的逆变器,但要获得相近的输出THD值,前者所需要的输出滤波器要远大于后者。
关键词:逆变器;单极性SPWM调制;滞环调制;比较
引言
逆变器主电路是一个开关式大功率放大器,逆变过程的实质是模-数-模的变化过程,它包括模-数和数-模两个变换,分别对应于数字通信技术中的调制编码与解调两个过程[1]。SPWM调制与滞环调制是目前逆变器中最常见的两种调制方式,它们分别从数字通信的脉宽调制和Delta调制发展而来。通信中调制的目的是为了远距离传输信号,而在电力电子装置中则是为了减小系统的体积、提高系统的动态响应和降低输出谐波含量。在逆变器的输出端需要并联输出滤波器,它相当于数字通信技术中的解调环节,其作用是滤除输出波形中无用的高次谐波。通过这两个环节,就实现了对基准波的功率放大。
文献[2]对SPWM调制和滞环调制做了仿真和实验分析。文献[3]讨论了6kV%26;#183;A电流滞环调制逆变器的研制并给出了输出波形。本文则从调制原理、系统的输出滤波器设计和最终输出波形THD等方面对两台分别采用电流滞环调制和电流型单极性SPWM调制的6kV%26;#183;A单相逆变器实际系统进行了研究和比较。
1 主电路与电压电流双环反馈控制
图1为逆变器主电路和控制系统的框图,主电路采用了全桥结构,输出端连接了LC滤波器滤除高次谐波。两个电路在控制上均采用了输出电压和电感电流双环控制,这种控制方式在保证系统稳定的同时还具有良好的动态特性与输出限流的特性。从图1可以看出,SPWM调制的逆变器和滞环调制的逆变器,除了调制器部分不同外,其余部分的电路在结构上完全相同,只是在参数上有所不同。因此,这两个系统在输出特性以及输出滤波器上的差异基本上可以认为是由这两种不同的调制方式所决定的。两个系统的输入均为DC380V,输出均为220V/50Hz,输出功率为6kV%26;#183;A。
图1 逆变器主电路与控制系统框图
2 两种调制方式原理
2.1 SPWM调制原理
单极性SPWM调制又分为非倍频和倍频两种方式,本文所讨论的SPWM调制的逆变器采用的是倍频方式,它在不改变开关管工作频率的情况下,通过对门级脉冲控制,可以使得输出波形中最低次谐波频率是开关频率的2倍,从而可以减小滤波器的体积。图2是这种调制方法的原理。
 在电流型单极性SPWM倍频调制中包含有两个载波信号ic1和ic2,且有
ic1=-ic2 (1)
调制信号ig与ic1与交截产生ug1与ug2信号,控制S1与S2的开关,ig与ic2交截产生ug3与ug4信号,控制S3与S4的开关。这种调制方式的实质是将一个全桥变换器拆分成两个半桥变换器,分别用两个相位相反的正弦波进行调制后得到的信号去控制它们(在这里采用的是载波ic1反相,等价于将ig反相),这样两个桥臂输出的基波就为带相同直流偏置、幅值相等且相位相反的正弦波,将这两个输出相减再滤除高频分量,就得到了标准的正弦输出波形。
2.2 滞环调制原理
三态滞环调制是从基本的Delta调制发展而来,图3是它的调制原理。
在电流型单极性SPWM倍频调制中包含有两个载波信号ic1和ic2,且有
ic1=-ic2 (1)
调制信号ig与ic1与交截产生ug1与ug2信号,控制S1与S2的开关,ig与ic2交截产生ug3与ug4信号,控制S3与S4的开关。这种调制方式的实质是将一个全桥变换器拆分成两个半桥变换器,分别用两个相位相反的正弦波进行调制后得到的信号去控制它们(在这里采用的是载波ic1反相,等价于将ig反相),这样两个桥臂输出的基波就为带相同直流偏置、幅值相等且相位相反的正弦波,将这两个输出相减再滤除高频分量,就得到了标准的正弦输出波形。
2.2 滞环调制原理
三态滞环调制是从基本的Delta调制发展而来,图3是它的调制原理。
 滞环调制没有单独的载波信号,而是将输出信号通过反馈网络产生一个斜坡函数iLf做为载波。h为滞环宽度,当iLf
滞环调制没有单独的载波信号,而是将输出信号通过反馈网络产生一个斜坡函数iLf做为载波。h为滞环宽度,当iLfig+h时,S2及S3导通,iLf下降,uab=-Uin;当ig-h
在单极性SPWM倍频调制下,ua与ub两点的电压波形是单极性SPWM脉冲,其占空比
D=uo/Uin (3)
所以,可得电感电流纹波的表达式为
 由式(4)可知,当uo=1/2Uin时,电感电流纹波最大,且
由式(4)可知,当uo=1/2Uin时,电感电流纹波最大,且
 实际电路中取电感值为0.5mH。
电路中电容的作用是和电感一起构成一个低通滤波器,因此,在电感值确定后,就可以根据L滤波器的截止频率来确定电容C的值。由于SPWM倍频调制方式下,输出谐波为开关频率2倍及以上的高次谐波,所以可以取截止频率为最低次输出谐波频率的1/10,即
实际电路中取电感值为0.5mH。
电路中电容的作用是和电感一起构成一个低通滤波器,因此,在电感值确定后,就可以根据L滤波器的截止频率来确定电容C的值。由于SPWM倍频调制方式下,输出谐波为开关频率2倍及以上的高次谐波,所以可以取截止频率为最低次输出谐波频率的1/10,即
 实际电路中,由于器件的非理想特性、基准波也非标准的正弦波以及死区对输出波形的影响,所以,输出波形中还包含有一定的低次谐波,C的取值必须大一些,以对这些低次谐波有一定的抑制作用,最终取电容值为16μF。
3.2 滞环调制下滤波器的设计
滞环调制下输出滤波器的设计和单极性SPWM倍频调制下有很大的不同。首先,滞环调制中电感电流的纹波是由滞环宽度h所决定,用电感电流的最大纹波值来确定电感值的方法并不适用。其次,滞环调制下由于开关频率并不固定,其输出电压波形谐波分布广且不含有特定频率的谐波[3],所以,与单极性SPWM调制下根据器件开关频率设定输出滤波器的截止频率不同,其输出滤波器的截止频率应该根据输出的基波频率来设定。本文中逆变器的输出频率为50Hz,取输出滤波器的截止频率为输出频率的10倍即500Hz,可得
实际电路中,由于器件的非理想特性、基准波也非标准的正弦波以及死区对输出波形的影响,所以,输出波形中还包含有一定的低次谐波,C的取值必须大一些,以对这些低次谐波有一定的抑制作用,最终取电容值为16μF。
3.2 滞环调制下滤波器的设计
滞环调制下输出滤波器的设计和单极性SPWM倍频调制下有很大的不同。首先,滞环调制中电感电流的纹波是由滞环宽度h所决定,用电感电流的最大纹波值来确定电感值的方法并不适用。其次,滞环调制下由于开关频率并不固定,其输出电压波形谐波分布广且不含有特定频率的谐波[3],所以,与单极性SPWM调制下根据器件开关频率设定输出滤波器的截止频率不同,其输出滤波器的截止频率应该根据输出的基波频率来设定。本文中逆变器的输出频率为50Hz,取输出滤波器的截止频率为输出频率的10倍即500Hz,可得
 从式(9)可以确定L和C的乘积值,再进一步确定L和C的取值则多依赖于工程经验进行综合考虑。如果L值过大将使系统的动态响应太慢,甚至使得电感电流追踪不上ig的变化导致系统失调;L值过小则会增加输出的脉动,增大损耗。C值越大输出电压的THD就越好,但同时也会增大逆变器的无功电流,增大损耗。工程中一般可以根据在剪切频率附近使得
ωL≈1/ωC (10)
来确定L和C的取值。
根据式(9)和式(10),最终实际系统中取L为1mH,C为80μF。
3.3 输出波形与THD
图4和图5是两种调制方式下6kV%26;#183;A逆变器在阻性负载下的满载输出波形,表1则是使用功率分析仪测得逆变器在空载、半载和满载情况下输出THD值,可见SPWM调制方式下的输出THD要明显好于电流滞环调制方式下的输出THD值。
从式(9)可以确定L和C的乘积值,再进一步确定L和C的取值则多依赖于工程经验进行综合考虑。如果L值过大将使系统的动态响应太慢,甚至使得电感电流追踪不上ig的变化导致系统失调;L值过小则会增加输出的脉动,增大损耗。C值越大输出电压的THD就越好,但同时也会增大逆变器的无功电流,增大损耗。工程中一般可以根据在剪切频率附近使得
ωL≈1/ωC (10)
来确定L和C的取值。
根据式(9)和式(10),最终实际系统中取L为1mH,C为80μF。
3.3 输出波形与THD
图4和图5是两种调制方式下6kV%26;#183;A逆变器在阻性负载下的满载输出波形,表1则是使用功率分析仪测得逆变器在空载、半载和满载情况下输出THD值,可见SPWM调制方式下的输出THD要明显好于电流滞环调制方式下的输出THD值。
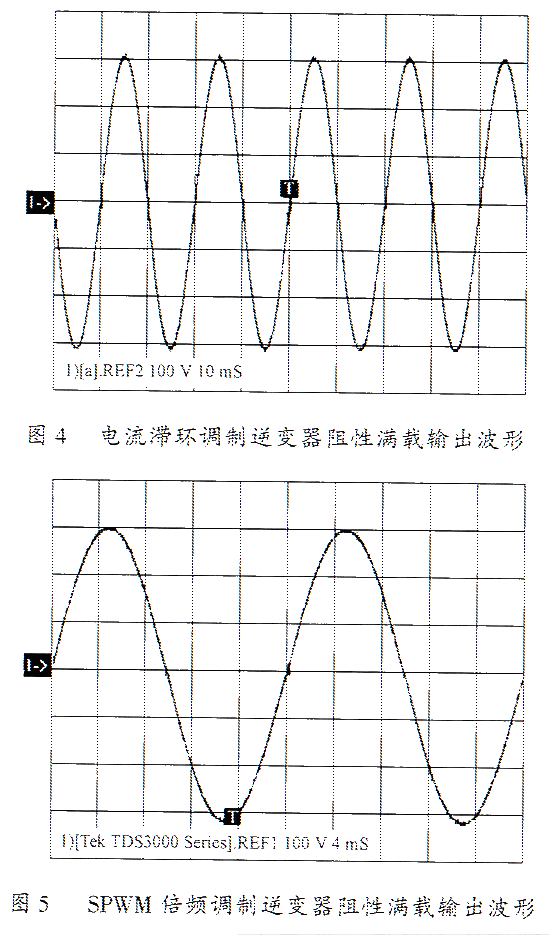 表1 两种调制方式下空载与满载输出THD值
负载
滞环调制
SPWM倍频调制
有效值/V
THD/%
有效值/V
THD/%
空载
221.1
1.0
222.1
0.6
半载
219.8
1.2
219.8
0.7
满载
217.8
1.3
218.3
0.7
4 结语
综上所述,电流滞环调制作为一种非线性的调制方式,和SPWM倍频调制相比,它具有稳定性强和动态响应快的优点。但滞环调制的逆变器输出波形谐波分布广,这使得滤波器的设计困难,在相同的功率等级下,尽管使用了大得多的滤波器,滞环调制逆变器输出波形THD值仍达到接近两倍SPWM倍频调制逆变器输出波形THD的值。同时也由于谐波频率丰富,滞环调制的输出滤波器的工作噪声也要比SPWM倍频控制大得多。所以,从改善输出波形和减小滤波器体积和噪声角度考虑,SPWM倍频调制显然是更好的选择。
表1 两种调制方式下空载与满载输出THD值
负载
滞环调制
SPWM倍频调制
有效值/V
THD/%
有效值/V
THD/%
空载
221.1
1.0
222.1
0.6
半载
219.8
1.2
219.8
0.7
满载
217.8
1.3
218.3
0.7
4 结语
综上所述,电流滞环调制作为一种非线性的调制方式,和SPWM倍频调制相比,它具有稳定性强和动态响应快的优点。但滞环调制的逆变器输出波形谐波分布广,这使得滤波器的设计困难,在相同的功率等级下,尽管使用了大得多的滤波器,滞环调制逆变器输出波形THD值仍达到接近两倍SPWM倍频调制逆变器输出波形THD的值。同时也由于谐波频率丰富,滞环调制的输出滤波器的工作噪声也要比SPWM倍频控制大得多。所以,从改善输出波形和减小滤波器体积和噪声角度考虑,SPWM倍频调制显然是更好的选择。
引用地址:6kV%26#183;A逆变器滞环调制与单极性SPWM倍频调制的比较
在电流型单极性SPWM倍频调制中包含有两个载波信号ic1和ic2,且有
ic1=-ic2 (1)
调制信号ig与ic1与交截产生ug1与ug2信号,控制S1与S2的开关,ig与ic2交截产生ug3与ug4信号,控制S3与S4的开关。这种调制方式的实质是将一个全桥变换器拆分成两个半桥变换器,分别用两个相位相反的正弦波进行调制后得到的信号去控制它们(在这里采用的是载波ic1反相,等价于将ig反相),这样两个桥臂输出的基波就为带相同直流偏置、幅值相等且相位相反的正弦波,将这两个输出相减再滤除高频分量,就得到了标准的正弦输出波形。
2.2 滞环调制原理
三态滞环调制是从基本的Delta调制发展而来,图3是它的调制原理。
滞环调制没有单独的载波信号,而是将输出信号通过反馈网络产生一个斜坡函数iLf做为载波。h为滞环宽度,当iLf
由式(4)可知,当uo=1/2Uin时,电感电流纹波最大,且
实际电路中取电感值为0.5mH。
电路中电容的作用是和电感一起构成一个低通滤波器,因此,在电感值确定后,就可以根据L滤波器的截止频率来确定电容C的值。由于SPWM倍频调制方式下,输出谐波为开关频率2倍及以上的高次谐波,所以可以取截止频率为最低次输出谐波频率的1/10,即
实际电路中,由于器件的非理想特性、基准波也非标准的正弦波以及死区对输出波形的影响,所以,输出波形中还包含有一定的低次谐波,C的取值必须大一些,以对这些低次谐波有一定的抑制作用,最终取电容值为16μF。
3.2 滞环调制下滤波器的设计
滞环调制下输出滤波器的设计和单极性SPWM倍频调制下有很大的不同。首先,滞环调制中电感电流的纹波是由滞环宽度h所决定,用电感电流的最大纹波值来确定电感值的方法并不适用。其次,滞环调制下由于开关频率并不固定,其输出电压波形谐波分布广且不含有特定频率的谐波[3],所以,与单极性SPWM调制下根据器件开关频率设定输出滤波器的截止频率不同,其输出滤波器的截止频率应该根据输出的基波频率来设定。本文中逆变器的输出频率为50Hz,取输出滤波器的截止频率为输出频率的10倍即500Hz,可得
从式(9)可以确定L和C的乘积值,再进一步确定L和C的取值则多依赖于工程经验进行综合考虑。如果L值过大将使系统的动态响应太慢,甚至使得电感电流追踪不上ig的变化导致系统失调;L值过小则会增加输出的脉动,增大损耗。C值越大输出电压的THD就越好,但同时也会增大逆变器的无功电流,增大损耗。工程中一般可以根据在剪切频率附近使得
ωL≈1/ωC (10)
来确定L和C的取值。
根据式(9)和式(10),最终实际系统中取L为1mH,C为80μF。
3.3 输出波形与THD
图4和图5是两种调制方式下6kV%26;#183;A逆变器在阻性负载下的满载输出波形,表1则是使用功率分析仪测得逆变器在空载、半载和满载情况下输出THD值,可见SPWM调制方式下的输出THD要明显好于电流滞环调制方式下的输出THD值。
表1 两种调制方式下空载与满载输出THD值
负载
滞环调制
SPWM倍频调制
有效值/V
THD/%
有效值/V
THD/%
空载
221.1
1.0
222.1
0.6
半载
219.8
1.2
219.8
0.7
满载
217.8
1.3
218.3
0.7
4 结语
综上所述,电流滞环调制作为一种非线性的调制方式,和SPWM倍频调制相比,它具有稳定性强和动态响应快的优点。但滞环调制的逆变器输出波形谐波分布广,这使得滤波器的设计困难,在相同的功率等级下,尽管使用了大得多的滤波器,滞环调制逆变器输出波形THD值仍达到接近两倍SPWM倍频调制逆变器输出波形THD的值。同时也由于谐波频率丰富,滞环调制的输出滤波器的工作噪声也要比SPWM倍频控制大得多。所以,从改善输出波形和减小滤波器体积和噪声角度考虑,SPWM倍频调制显然是更好的选择。
上一篇:大功率变频电源输出特性和实验分析
下一篇:多电平变换器的拓扑结构和控制策略
 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用 PA02M
PA02M
小广播
热门活动
换一批
更多

最新应用文章
更多精选电路图






更多热门文章
更多每日新闻
- CGD和Qorvo将共同革新电机控制解决方案
- 是德科技 FieldFox 手持式分析仪配合 VDI 扩频模块,实现毫米波分析功能
- 贸泽开售可精确测量CO2水平的 英飞凌PASCO2V15 XENSIV PAS CO2 5V传感器
- 玩法进阶,浩亭让您的PCB板端连接达到新高度!
- 长城汽车研发新篇章:固态电池技术引领未来
- 纳芯微提供全场景GaN驱动IC解决方案
- 解读华为固态电池新专利,2030 叫板宁德时代?
- 让纯电/插混车抓狂?中企推全球首款-40℃可放电增混电池,不怕冷
- 智驾域控知多少:中低端车型加速上车,行泊一体方案占主体
- Foresight推出六款先进立体传感器套件 彻底改变工业和汽车3D感知
更多往期活动
11月15日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号