摘要:考虑到多种微型盘在恶劣冲击振动环境中的使用要求,在采用外加固主动控制方案的基础上完成了模拟主动控制系统的设计与实现,详细分析了各部分的实现原理和方法。对实验样机的数值仿真和实验结果表明,该系统可兼顾冲击与振动控制,控制效果明显优于被动隔振。
关键词:微型盘 主动控制 冲击振动
微型硬盘是一种应用广泛的关键信息存储器件,硬件它的抗振动、冲击控制技术对于工作在恶劣环境下的硬盘和便携式计算机具有重要意义。对数据存储业来说,磁盘驱动器生产商通过增加磁道密度和磁盘转速来扩大计算机硬盘驱动器的容量并改善其性能。但随着磁密度的增加、两相邻磁道间蹁的变小,允许读/写头和磁道的偏离误差也相应降低,很容易使硬盘受到伤害。本文采用外加固主动控制方案,将电磁主动控制技术用于磁存储设备的振动冲击外固中,实现了模拟主动控制系统并得到实验验证。
 1 主动冲击振动控制技术
提高微型硬盘的抗冲击与抗振动性能始终是国内外十分重视的研究课题。20世纪80年代初至90年代中期,多采用被动控制技术,如钢丝绳减振器、油膜减振器、复刚度双橡胶减振器等。随后,主动控制技术逐步实施于磁盘驱动器的振动与冲击加固中,它可对低频振动和高g值冲击有效兼容,克服了被动控制方式难以同时满足这两项指标的缺点。计算机加固主动控制技术从物理实现形式来说分为两加固和外加固两种。内加固是在硬盘内部进行取数臂的主动控制加固,我国从20世纪90年代中期开始对被动外加固技术进行深入研究,已获得一些可实施的较好成果,如无谐振峰隔振缓冲器等。随着对强冲击、较低频振动抗振要求的提高,研究主动控制理论及装置将成为提高抗振技术水平的必经之路。
1 主动冲击振动控制技术
提高微型硬盘的抗冲击与抗振动性能始终是国内外十分重视的研究课题。20世纪80年代初至90年代中期,多采用被动控制技术,如钢丝绳减振器、油膜减振器、复刚度双橡胶减振器等。随后,主动控制技术逐步实施于磁盘驱动器的振动与冲击加固中,它可对低频振动和高g值冲击有效兼容,克服了被动控制方式难以同时满足这两项指标的缺点。计算机加固主动控制技术从物理实现形式来说分为两加固和外加固两种。内加固是在硬盘内部进行取数臂的主动控制加固,我国从20世纪90年代中期开始对被动外加固技术进行深入研究,已获得一些可实施的较好成果,如无谐振峰隔振缓冲器等。随着对强冲击、较低频振动抗振要求的提高,研究主动控制理论及装置将成为提高抗振技术水平的必经之路。
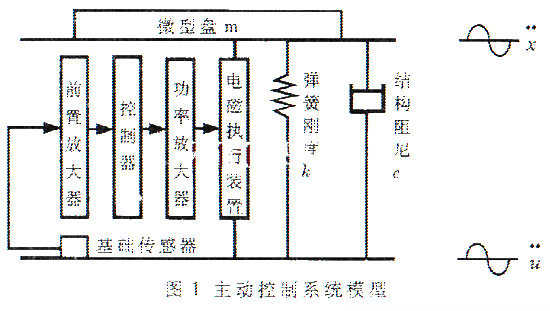
 实际应用中,控制系统要承受来自各个方向的振动和冲击,对于头盘系统而言,主要是承受来自垂直于盘面方向的冲击,故将系统考虑为单自由度系统,如图1所示。其中,传感器、控制器、功率放大器是系统的电路部分,而执行装置、弹簧、阻尼和质量块则是系统的机械部分。
实际应用中,控制系统要承受来自各个方向的振动和冲击,对于头盘系统而言,主要是承受来自垂直于盘面方向的冲击,故将系统考虑为单自由度系统,如图1所示。其中,传感器、控制器、功率放大器是系统的电路部分,而执行装置、弹簧、阻尼和质量块则是系统的机械部分。
 本系统的受控对象是微型硬盘;加速度传感器、前置放大器等构成系统的测量模块;控制器按基础传感信号和控制策略发出控制信号;电磁执行装置为作动器;功率放大器将控制信号放大器并提供控制能源,驱动作动器产生执行动作。控制系统工作原理是通过基础加速度传感器拾取基础振动冲击加速度信号,经前置放大器放大后送入控制器,在控制器中完成信号的一次积分(转换为速度信号)和二次积分(转换为位移信号)运算,将两次积分结果作为求和运算,之后输入功率放大器,最后将功率放大器输出信号以控制电压的形式加在执行机构上,执行机构便会产生相应的作动力抵消来自基础的振动和冲击。
本系统的受控对象是微型硬盘;加速度传感器、前置放大器等构成系统的测量模块;控制器按基础传感信号和控制策略发出控制信号;电磁执行装置为作动器;功率放大器将控制信号放大器并提供控制能源,驱动作动器产生执行动作。控制系统工作原理是通过基础加速度传感器拾取基础振动冲击加速度信号,经前置放大器放大后送入控制器,在控制器中完成信号的一次积分(转换为速度信号)和二次积分(转换为位移信号)运算,将两次积分结果作为求和运算,之后输入功率放大器,最后将功率放大器输出信号以控制电压的形式加在执行机构上,执行机构便会产生相应的作动力抵消来自基础的振动和冲击。
 2 模拟主动控制系统电路设计
2.1 传感器选择
压电式传感器是一种机械量(作用于传感器上的加速度或压力)转换成电荷量的换能量,可等效为电荷源或电压源。由于压电传感器的泄漏电阻通常较大,所以能较长时间地保存电荷,但若负载电阻很小,传感器受力后产生的电荷就会以时间常数舭粗甘媛珊芸旆诺纭R虼耍笱沟绱衅鞲涸氐缱枳愎淮螅约跣〔饬课蟛睢0凑罩鞫刂浦鞣桨柑致鄣慕峁捎醚沟缡郊铀俣却衅鳎映杀镜慕嵌瓤悸牵疚难∮貌淮糯笃鞯腨D-1型加速传感器,其输出信号精度为0.01mv/g,并在加速度传感器后端设计了电荷放大电路。
图5
2.2 电荷放大器设计
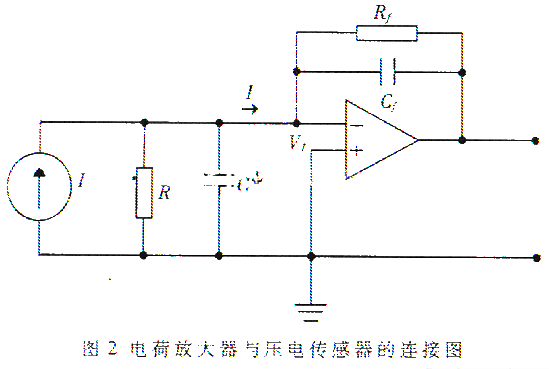
电荷放大器是输出电压正比于输入电荷的一种放大器,通常用来放大压电传感器产生 的电荷量。电荷放大器与压电传感器的连接电路如图2所示。
图中,Cf为反馈电容,Rf为反馈电阻。并联反馈电阻的目的是避免电容上不断累积直流电荷而造成运放输出饱和。在理想运放条件下,输入电流I等于反馈电流。经分析可得,电荷放大器输出电压仅取决于输入电荷Q及反馈电路参数Cf,即:
Vo≈-[(A0Q)/(1+A0)Cf]≈Q/Cf
这里,反馈电容必须采用高质量电容,否则会由于电容漏电引起误差。
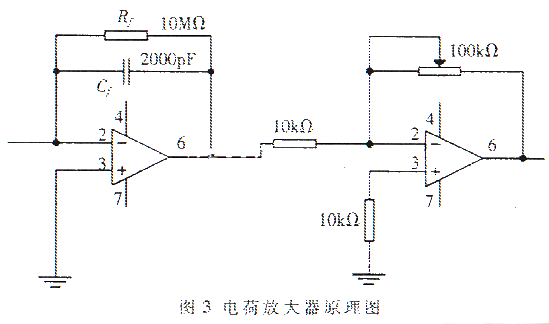
由以上讨论可知,作为核心器件的运算放大器,其输入阻抗应高于10 12ΩD707。为保证足够高的灵敏度又不影响电荷放大器的低频特性,实际电路中取Cf=2000pF,Rf=10M佟A硗猓苊夂蠹队跋焱北阌诘鹘冢诘绾煞糯笃骱蠖嗽黾恿艘患妒淙胱杩菇细摺⒃鲆婵傻鞯姆聪喾糯笃鳎缤 3所示。
图6
2.3 积分电路设计
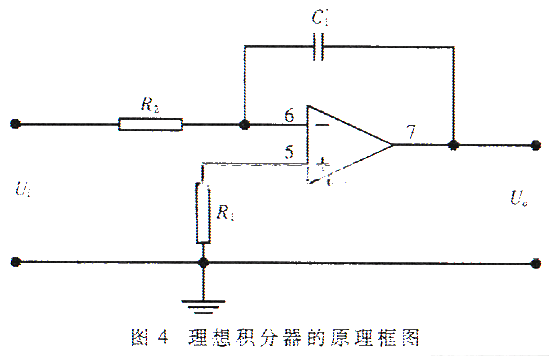
本系统中采用放大器实现有源模拟积分器。理想模拟积分器如图4所示。这只是一种理想化的电路,而实际应用中积分电路前后级都有运放器件,电路每次上电后电容两端积累的电荷不能迅速放掉,一旦上电,冲击电压幅值较大,电容两端的电压即会维持在较高幅度,对积分器的初始状态影响较大。且其响应带宽很窄,在低频段的漂移现象也比较显著。因此,在电容两端并联阻值较大的反馈电阻,以提高积分运算之间设置反相放大器,校正输入信号极性并调节积分输出的信号幅度。一次积分实际电路如图5所示,二次积分与一次积分具有相似的电路结构。
2.4 功放放大器设计
根据系统仿真计算结果,要求控制系统对作动器的输出能力为:最大电压Umax=13.5V,最大电流Imax=2.0A。因此,要求功放的输出峰值功率为40W。本文选用OPA541作为功率放大器的主要器件,该芯片可以连续输出5A的电流,常用作电动机、音频放大器的功率输出级。功放部分的电路如图6所示。
实际使用时,由于OPA541芯片的工作温度不能超过150℃,且该器件本身的散热部分和芯片的负电源相连,因此应格外注意外加散热器和芯片负电源之间的绝缘措施,以免引起不良后果。另外,为避免加电时功放输出冲击电压引起执行装置跳动产生的不利影响,功放输出经10~15秒延时后接通为宜。
2 模拟主动控制系统电路设计
2.1 传感器选择
压电式传感器是一种机械量(作用于传感器上的加速度或压力)转换成电荷量的换能量,可等效为电荷源或电压源。由于压电传感器的泄漏电阻通常较大,所以能较长时间地保存电荷,但若负载电阻很小,传感器受力后产生的电荷就会以时间常数舭粗甘媛珊芸旆诺纭R虼耍笱沟绱衅鞲涸氐缱枳愎淮螅约跣〔饬课蟛睢0凑罩鞫刂浦鞣桨柑致鄣慕峁捎醚沟缡郊铀俣却衅鳎映杀镜慕嵌瓤悸牵疚难∮貌淮糯笃鞯腨D-1型加速传感器,其输出信号精度为0.01mv/g,并在加速度传感器后端设计了电荷放大电路。
图5
2.2 电荷放大器设计
电荷放大器是输出电压正比于输入电荷的一种放大器,通常用来放大压电传感器产生 的电荷量。电荷放大器与压电传感器的连接电路如图2所示。
图中,Cf为反馈电容,Rf为反馈电阻。并联反馈电阻的目的是避免电容上不断累积直流电荷而造成运放输出饱和。在理想运放条件下,输入电流I等于反馈电流。经分析可得,电荷放大器输出电压仅取决于输入电荷Q及反馈电路参数Cf,即:
Vo≈-[(A0Q)/(1+A0)Cf]≈Q/Cf
这里,反馈电容必须采用高质量电容,否则会由于电容漏电引起误差。
由以上讨论可知,作为核心器件的运算放大器,其输入阻抗应高于10 12ΩD707。为保证足够高的灵敏度又不影响电荷放大器的低频特性,实际电路中取Cf=2000pF,Rf=10M佟A硗猓苊夂蠹队跋焱北阌诘鹘冢诘绾煞糯笃骱蠖嗽黾恿艘患妒淙胱杩菇细摺⒃鲆婵傻鞯姆聪喾糯笃鳎缤 3所示。
图6
2.3 积分电路设计
本系统中采用放大器实现有源模拟积分器。理想模拟积分器如图4所示。这只是一种理想化的电路,而实际应用中积分电路前后级都有运放器件,电路每次上电后电容两端积累的电荷不能迅速放掉,一旦上电,冲击电压幅值较大,电容两端的电压即会维持在较高幅度,对积分器的初始状态影响较大。且其响应带宽很窄,在低频段的漂移现象也比较显著。因此,在电容两端并联阻值较大的反馈电阻,以提高积分运算之间设置反相放大器,校正输入信号极性并调节积分输出的信号幅度。一次积分实际电路如图5所示,二次积分与一次积分具有相似的电路结构。
2.4 功放放大器设计
根据系统仿真计算结果,要求控制系统对作动器的输出能力为:最大电压Umax=13.5V,最大电流Imax=2.0A。因此,要求功放的输出峰值功率为40W。本文选用OPA541作为功率放大器的主要器件,该芯片可以连续输出5A的电流,常用作电动机、音频放大器的功率输出级。功放部分的电路如图6所示。
实际使用时,由于OPA541芯片的工作温度不能超过150℃,且该器件本身的散热部分和芯片的负电源相连,因此应格外注意外加散热器和芯片负电源之间的绝缘措施,以免引起不良后果。另外,为避免加电时功放输出冲击电压引起执行装置跳动产生的不利影响,功放输出经10~15秒延时后接通为宜。
 3 实验测试结果
3.1 振动实验
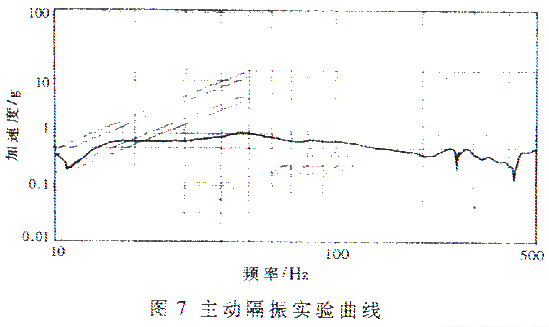
振运实现采用正弦扫描实验,在基础振动频率为50Hz以上、加速度恒为5g的条件下,正弦扫频实验结果如图7所示。图中折线部分为基础激励加速度,曲线值为控制后的加速度。实验过程中,硬盘工作正常。
3.2 冲击实验
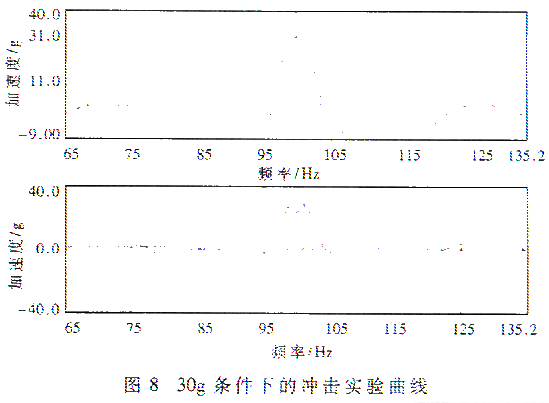
在最大冲击加速度为30g条件下的冲击实验曲线如图8所示,实验采用持续时间为9ms的半正弦波。其中,实验图的上半部分为冲击信号图线,下半部分为冲击信号与控制后检测到的加速度图线的合成图。
可以看出,图形上端的基础冲击加速度最大值为31g,而下降经过控制之后的最大加速度为-3.83g,控制效果比较理想,隔冲率达到12.7%。实验后硬盘可正常读/写,未受到损坏。
3 实验测试结果
3.1 振动实验
振运实现采用正弦扫描实验,在基础振动频率为50Hz以上、加速度恒为5g的条件下,正弦扫频实验结果如图7所示。图中折线部分为基础激励加速度,曲线值为控制后的加速度。实验过程中,硬盘工作正常。
3.2 冲击实验
在最大冲击加速度为30g条件下的冲击实验曲线如图8所示,实验采用持续时间为9ms的半正弦波。其中,实验图的上半部分为冲击信号图线,下半部分为冲击信号与控制后检测到的加速度图线的合成图。
可以看出,图形上端的基础冲击加速度最大值为31g,而下降经过控制之后的最大加速度为-3.83g,控制效果比较理想,隔冲率达到12.7%。实验后硬盘可正常读/写,未受到损坏。
 将模拟主动控制技术用于微型盘的冲击振动外加固,原理简单、方法可行。实验结果表明,该系统可兼顾冲击与振动控制,具有较大的位移响应范围和较宽的频率响应范围,控制效果明显优于被动隔振。由于实验效果与仿真结果尚有一定偏差,在今后的实验中应该注意提高微型盘差,在今后的实验中应该注意提高微型盘与上顶板之间的连接刚度。实验证实,通过设置粘弹性阻尼垫的方法确定可以改善控制效果。
将模拟主动控制技术用于微型盘的冲击振动外加固,原理简单、方法可行。实验结果表明,该系统可兼顾冲击与振动控制,具有较大的位移响应范围和较宽的频率响应范围,控制效果明显优于被动隔振。由于实验效果与仿真结果尚有一定偏差,在今后的实验中应该注意提高微型盘差,在今后的实验中应该注意提高微型盘与上顶板之间的连接刚度。实验证实,通过设置粘弹性阻尼垫的方法确定可以改善控制效果。
引用地址:微型盘抗振模拟主动控制系统的设计与实现
1 主动冲击振动控制技术
提高微型硬盘的抗冲击与抗振动性能始终是国内外十分重视的研究课题。20世纪80年代初至90年代中期,多采用被动控制技术,如钢丝绳减振器、油膜减振器、复刚度双橡胶减振器等。随后,主动控制技术逐步实施于磁盘驱动器的振动与冲击加固中,它可对低频振动和高g值冲击有效兼容,克服了被动控制方式难以同时满足这两项指标的缺点。计算机加固主动控制技术从物理实现形式来说分为两加固和外加固两种。内加固是在硬盘内部进行取数臂的主动控制加固,我国从20世纪90年代中期开始对被动外加固技术进行深入研究,已获得一些可实施的较好成果,如无谐振峰隔振缓冲器等。随着对强冲击、较低频振动抗振要求的提高,研究主动控制理论及装置将成为提高抗振技术水平的必经之路。
实际应用中,控制系统要承受来自各个方向的振动和冲击,对于头盘系统而言,主要是承受来自垂直于盘面方向的冲击,故将系统考虑为单自由度系统,如图1所示。其中,传感器、控制器、功率放大器是系统的电路部分,而执行装置、弹簧、阻尼和质量块则是系统的机械部分。
本系统的受控对象是微型硬盘;加速度传感器、前置放大器等构成系统的测量模块;控制器按基础传感信号和控制策略发出控制信号;电磁执行装置为作动器;功率放大器将控制信号放大器并提供控制能源,驱动作动器产生执行动作。控制系统工作原理是通过基础加速度传感器拾取基础振动冲击加速度信号,经前置放大器放大后送入控制器,在控制器中完成信号的一次积分(转换为速度信号)和二次积分(转换为位移信号)运算,将两次积分结果作为求和运算,之后输入功率放大器,最后将功率放大器输出信号以控制电压的形式加在执行机构上,执行机构便会产生相应的作动力抵消来自基础的振动和冲击。
2 模拟主动控制系统电路设计
2.1 传感器选择
压电式传感器是一种机械量(作用于传感器上的加速度或压力)转换成电荷量的换能量,可等效为电荷源或电压源。由于压电传感器的泄漏电阻通常较大,所以能较长时间地保存电荷,但若负载电阻很小,传感器受力后产生的电荷就会以时间常数舭粗甘媛珊芸旆诺纭R虼耍笱沟绱衅鞲涸氐缱枳愎淮螅约跣〔饬课蟛睢0凑罩鞫刂浦鞣桨柑致鄣慕峁捎醚沟缡郊铀俣却衅鳎映杀镜慕嵌瓤悸牵疚难∮貌淮糯笃鞯腨D-1型加速传感器,其输出信号精度为0.01mv/g,并在加速度传感器后端设计了电荷放大电路。
图5
2.2 电荷放大器设计
电荷放大器是输出电压正比于输入电荷的一种放大器,通常用来放大压电传感器产生 的电荷量。电荷放大器与压电传感器的连接电路如图2所示。
图中,Cf为反馈电容,Rf为反馈电阻。并联反馈电阻的目的是避免电容上不断累积直流电荷而造成运放输出饱和。在理想运放条件下,输入电流I等于反馈电流。经分析可得,电荷放大器输出电压仅取决于输入电荷Q及反馈电路参数Cf,即:
Vo≈-[(A0Q)/(1+A0)Cf]≈Q/Cf
这里,反馈电容必须采用高质量电容,否则会由于电容漏电引起误差。
由以上讨论可知,作为核心器件的运算放大器,其输入阻抗应高于10 12ΩD707。为保证足够高的灵敏度又不影响电荷放大器的低频特性,实际电路中取Cf=2000pF,Rf=10M佟A硗猓苊夂蠹队跋焱北阌诘鹘冢诘绾煞糯笃骱蠖嗽黾恿艘患妒淙胱杩菇细摺⒃鲆婵傻鞯姆聪喾糯笃鳎缤 3所示。
图6
2.3 积分电路设计
本系统中采用放大器实现有源模拟积分器。理想模拟积分器如图4所示。这只是一种理想化的电路,而实际应用中积分电路前后级都有运放器件,电路每次上电后电容两端积累的电荷不能迅速放掉,一旦上电,冲击电压幅值较大,电容两端的电压即会维持在较高幅度,对积分器的初始状态影响较大。且其响应带宽很窄,在低频段的漂移现象也比较显著。因此,在电容两端并联阻值较大的反馈电阻,以提高积分运算之间设置反相放大器,校正输入信号极性并调节积分输出的信号幅度。一次积分实际电路如图5所示,二次积分与一次积分具有相似的电路结构。
2.4 功放放大器设计
根据系统仿真计算结果,要求控制系统对作动器的输出能力为:最大电压Umax=13.5V,最大电流Imax=2.0A。因此,要求功放的输出峰值功率为40W。本文选用OPA541作为功率放大器的主要器件,该芯片可以连续输出5A的电流,常用作电动机、音频放大器的功率输出级。功放部分的电路如图6所示。
实际使用时,由于OPA541芯片的工作温度不能超过150℃,且该器件本身的散热部分和芯片的负电源相连,因此应格外注意外加散热器和芯片负电源之间的绝缘措施,以免引起不良后果。另外,为避免加电时功放输出冲击电压引起执行装置跳动产生的不利影响,功放输出经10~15秒延时后接通为宜。
3 实验测试结果
3.1 振动实验
振运实现采用正弦扫描实验,在基础振动频率为50Hz以上、加速度恒为5g的条件下,正弦扫频实验结果如图7所示。图中折线部分为基础激励加速度,曲线值为控制后的加速度。实验过程中,硬盘工作正常。
3.2 冲击实验
在最大冲击加速度为30g条件下的冲击实验曲线如图8所示,实验采用持续时间为9ms的半正弦波。其中,实验图的上半部分为冲击信号图线,下半部分为冲击信号与控制后检测到的加速度图线的合成图。
可以看出,图形上端的基础冲击加速度最大值为31g,而下降经过控制之后的最大加速度为-3.83g,控制效果比较理想,隔冲率达到12.7%。实验后硬盘可正常读/写,未受到损坏。
将模拟主动控制技术用于微型盘的冲击振动外加固,原理简单、方法可行。实验结果表明,该系统可兼顾冲击与振动控制,具有较大的位移响应范围和较宽的频率响应范围,控制效果明显优于被动隔振。由于实验效果与仿真结果尚有一定偏差,在今后的实验中应该注意提高微型盘差,在今后的实验中应该注意提高微型盘与上顶板之间的连接刚度。实验证实,通过设置粘弹性阻尼垫的方法确定可以改善控制效果。
上一篇:基于LPC2104的智能灯光控制器设计
下一篇:数字化舞台布光灯具控制器的设计
- 热门资源推荐
- 热门放大器推荐
 模拟集成电路设计与仿真
模拟集成电路设计与仿真 UA747EHCQM
UA747EHCQM










 京公网安备 11010802033920号
京公网安备 11010802033920号