摘要:介绍了研制的用于高密度母盘刻录系统的专用运动控制卡。该运动控制卡基于DSP中心处理器和CPLD逻辑处理器模块而设计,实现了母盘刻录运动控制的快速性和高精度,能够很好地满足母盘刻录机运动控制的需要。
关键词:DSP CPLD 母盘刻录 运动控制卡
随着电子技术的发展,采用计算机和运动控制卡构成主从式控制系统并由下位机——运动控制卡(MotionController)完成主要数学运算,已经成为当前先进运动控制技术的主流。运动控制卡采用高速数字信号处理器为核心处理器。由于DSP具有独立的数据存储器和指令存储器,使得在控制单元内,数据和指令可并行传输,大大提高了数据的处理速度,可以实现各种复杂的控制算法,因而得到了广泛应用。美国Delta Tau数字系统公司的PMAC运动控制卡和香港固高科技的GT-400运动控制卡分别为国内外商品化运动控制卡的顶尖之作(PMAC功能强大,适合于复杂运动控制)。奥地利B%26;amp;R工业自动化公司的新一代可编程计算机控制器PCC采用多任务机制构筑其应用软件的运行平台,这样应用程序的运行周期与程序长短无关,而是由操作系统的循环周期决定。由此它将应用程序的扫描周期同外部的控制周期区别开来,满足了真正实时控制的要求。
 高密度母盘刻录过程中有两个主运动。一个是母盘的高速回转运动,另一个是刻录光学头相对母盘圆心的直线直线微进给运动。母盘刻录机的运动控制系统的最主要任务就是通过对两个主运动的精密控制,使得聚焦光斑以恒定线速度沿着等线距的外展型阿基米德螺旋线轨迹运动。为实现高精度恒线速刻录,这两个主运动都必须不断调速,并且保证极高的精度。刻录机刻录时的道间距很小,只有400nm,刻录过程中要求高速8.75%26;#215;10 4次,而且主轴电机最高的运行速度为1500RPM。在这样的较高转速的情况下要进行如此频繁的变速,控制的难度很大,传统的控制方式很难满足要求。此外,商品化的运动控制卡由于其具有很强的通用性,也无法完全满足母盘记得录系统的需要。为此,需要研制用于高密度母盘刻录系统的专用运动控制卡。
高密度母盘刻录过程中有两个主运动。一个是母盘的高速回转运动,另一个是刻录光学头相对母盘圆心的直线直线微进给运动。母盘刻录机的运动控制系统的最主要任务就是通过对两个主运动的精密控制,使得聚焦光斑以恒定线速度沿着等线距的外展型阿基米德螺旋线轨迹运动。为实现高精度恒线速刻录,这两个主运动都必须不断调速,并且保证极高的精度。刻录机刻录时的道间距很小,只有400nm,刻录过程中要求高速8.75%26;#215;10 4次,而且主轴电机最高的运行速度为1500RPM。在这样的较高转速的情况下要进行如此频繁的变速,控制的难度很大,传统的控制方式很难满足要求。此外,商品化的运动控制卡由于其具有很强的通用性,也无法完全满足母盘记得录系统的需要。为此,需要研制用于高密度母盘刻录系统的专用运动控制卡。
 1 专用运动控制卡总体方案
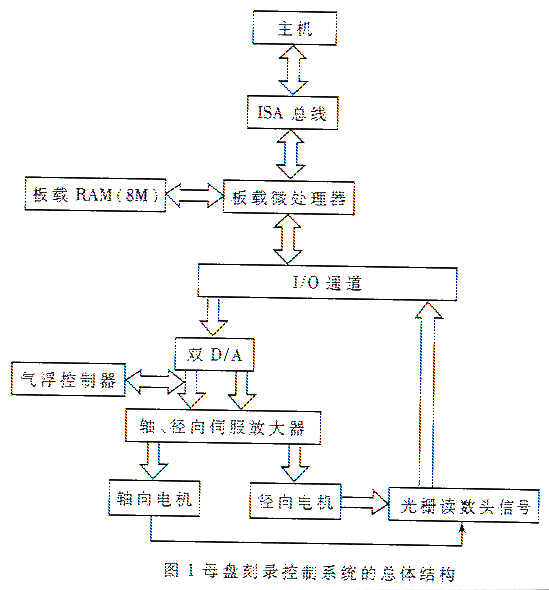
高密度母盘刻录机的运动控制系统采用工控机和运动控制卡构成的主从式控制系统,并由下位机——运动控制卡完成主要数学运算。工控机负责人机交互界面的管理和控制系统的实时监控等方面的工作,运动控制卡完成运动控制的所有细节(包括脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等)。母盘刻录控制系统的总体结构如图1所示。
基于DSP的中心处理器的设计是响应速度最快、符合最小化原理、稳定性最高的方案,同时也是最复杂、最难的方案。母盘刻录机专用运动控制卡的结构如图2所示。
1 专用运动控制卡总体方案
高密度母盘刻录机的运动控制系统采用工控机和运动控制卡构成的主从式控制系统,并由下位机——运动控制卡完成主要数学运算。工控机负责人机交互界面的管理和控制系统的实时监控等方面的工作,运动控制卡完成运动控制的所有细节(包括脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等)。母盘刻录控制系统的总体结构如图1所示。
基于DSP的中心处理器的设计是响应速度最快、符合最小化原理、稳定性最高的方案,同时也是最复杂、最难的方案。母盘刻录机专用运动控制卡的结构如图2所示。
 整个运动控制卡系统包括:DSP单元、DSP外部存储器单元、DSP-DA输出控制单元、ISA总线接口单元、双口RAM构成的ISA消息协议栈单元、系统译码单元和光栅信号处理单元。
系统的中心由DSP完成控制和伺服功能;自举ROM存有DSP数据系统主程序及系统初始化信息;数据RAM用于存储DSP运行时的数据;CPLD为数据交换逻辑接口,负责控制信号的输出和光栅信号的输入与处理(四倍频、计数等)。该数控系统通过ISA总线接口与工控机连接,完成控制过程中控制指令与状态参数的传递。
2 具体模块设计
下面具体介绍一下专用运动控制卡的各个模块的设计。
2.1 核心DSP的设计
高密度母盘刻录机控制系统的工作是属于运算密集型的任务,因此采用DSP作为中心处理器是非常好的选择。由于控制系统要求的精度很高,运算量非常大,而且运算的动态范围很大,所以定点的DSP无法满足运算的要求,不但速度跟不上,而且还会产生定标不当的问题,导致运算精度丢失,或是出现溢出错误。另外考虑到系统兼容性问题,最终选择了TI公司的高精度浮点运算处理器TMS320C32作为下位机的中心处理器。它具有可变宽度的存储器接口、更快速的指令周期时间、可设置优先级的双通道DMA处理器、灵活的引导程序装入方式、可重新定位的中断向量表以及可选的边缘/电平触发中断方式等。
整个运动控制卡系统包括:DSP单元、DSP外部存储器单元、DSP-DA输出控制单元、ISA总线接口单元、双口RAM构成的ISA消息协议栈单元、系统译码单元和光栅信号处理单元。
系统的中心由DSP完成控制和伺服功能;自举ROM存有DSP数据系统主程序及系统初始化信息;数据RAM用于存储DSP运行时的数据;CPLD为数据交换逻辑接口,负责控制信号的输出和光栅信号的输入与处理(四倍频、计数等)。该数控系统通过ISA总线接口与工控机连接,完成控制过程中控制指令与状态参数的传递。
2 具体模块设计
下面具体介绍一下专用运动控制卡的各个模块的设计。
2.1 核心DSP的设计
高密度母盘刻录机控制系统的工作是属于运算密集型的任务,因此采用DSP作为中心处理器是非常好的选择。由于控制系统要求的精度很高,运算量非常大,而且运算的动态范围很大,所以定点的DSP无法满足运算的要求,不但速度跟不上,而且还会产生定标不当的问题,导致运算精度丢失,或是出现溢出错误。另外考虑到系统兼容性问题,最终选择了TI公司的高精度浮点运算处理器TMS320C32作为下位机的中心处理器。它具有可变宽度的存储器接口、更快速的指令周期时间、可设置优先级的双通道DMA处理器、灵活的引导程序装入方式、可重新定位的中断向量表以及可选的边缘/电平触发中断方式等。
 2.1.1 核心DSP存储器电路设计
TMS320C32不具有片内的存储器,所以存储器的连接十分重要。C32通过24位的地址总线、32位的数据总线和三组选通信号IOSTRB、STRB0、STRB1访问外部存储器。TMS320C32总共提供16M字的存储空间,每字32bit,这16M字空间包括程序存储器、数据存储器及I/O空间。
TMS320C32对外部存储器的访问必须经过选通信号引脚,三组选通信号IOSTRB、STRB0、STRB1分别对应存储器映像的不同位置。IOSTRB对应的存储器映像从810000h到82FFFFh,总共128K字,当访问这部分存储空间时,IOSTRB使能。STRB0对应两块不连续的存储器映像,分别是从1001h到7FFFFFh(共8.192M字)和从880000h到8FFFFFh(共512K字)。STRB1对应从900000h到FFFFFFh的7.168M字。
2.1.1 核心DSP存储器电路设计
TMS320C32不具有片内的存储器,所以存储器的连接十分重要。C32通过24位的地址总线、32位的数据总线和三组选通信号IOSTRB、STRB0、STRB1访问外部存储器。TMS320C32总共提供16M字的存储空间,每字32bit,这16M字空间包括程序存储器、数据存储器及I/O空间。
TMS320C32对外部存储器的访问必须经过选通信号引脚,三组选通信号IOSTRB、STRB0、STRB1分别对应存储器映像的不同位置。IOSTRB对应的存储器映像从810000h到82FFFFh,总共128K字,当访问这部分存储空间时,IOSTRB使能。STRB0对应两块不连续的存储器映像,分别是从1001h到7FFFFFh(共8.192M字)和从880000h到8FFFFFh(共512K字)。STRB1对应从900000h到FFFFFFh的7.168M字。
 2.1.2 核心DSP的BOOT LOADER设计
DSP有两种工作模式:微处理器方式(MP)和微计算机方式(MCBL)。微处理器方式(MP)不能自启动,必须由主机引导才能进入工作状态,也就是说必须由主机装入工作程序;微计算机方式(MCBL)具有自启动和程序自引导功能,这使得ATMS320C32的硬件系统设计极为方便。
TMS320C32芯片的引脚MCBL/MP用来选择工作方式,当该引脚为低电平时,工作于一般的微处理器方式;当该引脚为高电平时,则工作于微计算机方式。具体电路设计中的工作方式选择是通过一个巧妙的泻放电路来实现的,避免了使用复杂的逻辑器件,如图3所示。
2.1.3 核心DSP的中断设计
当TMS320C32工作在MCBL方式时,采用双矢量方案来响应中断请求,需在相应的中断矢量地址存放跳转指令,而不是直接存放中断服务程序的地址。对于TMS320C32来说,中断向量表是可以根据用户自己的需要重新定位的。其中,中断-陷阱向量表的表首指针为ITTP(the Interrupt-trap Table Pointer),由中断标志寄存器IF的31~16位组成。该指针左移8位(零位移入)即构成中断-陷阱向量表的表首基地址EA(ITTP),如图4所示。
图6
2.1.4 核心DSP的Reset设计
TMS320C3X的复位是通过在Reset引脚上置10个H1周期以上的低电平来实现的。通常情况下是加入专用的WatchDog复位电路。介在本系统中,巧妙地设计了复位脉冲发生器,省去了复杂的WatchDog电路,如图5所示。
可以算出RESET信号维持在COMS的低电平VIH=3.5V的时间约为0.05s>>10 TH 1(TH1=2.5%26;#215;10 -8s)。这样的RESET设计即可满足要求。
2.1.5 核心DSP与D/A转换器的设计
2.1.2 核心DSP的BOOT LOADER设计
DSP有两种工作模式:微处理器方式(MP)和微计算机方式(MCBL)。微处理器方式(MP)不能自启动,必须由主机引导才能进入工作状态,也就是说必须由主机装入工作程序;微计算机方式(MCBL)具有自启动和程序自引导功能,这使得ATMS320C32的硬件系统设计极为方便。
TMS320C32芯片的引脚MCBL/MP用来选择工作方式,当该引脚为低电平时,工作于一般的微处理器方式;当该引脚为高电平时,则工作于微计算机方式。具体电路设计中的工作方式选择是通过一个巧妙的泻放电路来实现的,避免了使用复杂的逻辑器件,如图3所示。
2.1.3 核心DSP的中断设计
当TMS320C32工作在MCBL方式时,采用双矢量方案来响应中断请求,需在相应的中断矢量地址存放跳转指令,而不是直接存放中断服务程序的地址。对于TMS320C32来说,中断向量表是可以根据用户自己的需要重新定位的。其中,中断-陷阱向量表的表首指针为ITTP(the Interrupt-trap Table Pointer),由中断标志寄存器IF的31~16位组成。该指针左移8位(零位移入)即构成中断-陷阱向量表的表首基地址EA(ITTP),如图4所示。
图6
2.1.4 核心DSP的Reset设计
TMS320C3X的复位是通过在Reset引脚上置10个H1周期以上的低电平来实现的。通常情况下是加入专用的WatchDog复位电路。介在本系统中,巧妙地设计了复位脉冲发生器,省去了复杂的WatchDog电路,如图5所示。
可以算出RESET信号维持在COMS的低电平VIH=3.5V的时间约为0.05s>>10 TH 1(TH1=2.5%26;#215;10 -8s)。这样的RESET设计即可满足要求。
2.1.5 核心DSP与D/A转换器的设计
 由于系统要求的寻址定位的精度很高,作为最后一环的D/A转换器一定要有高精度和高速的特性,否则前面由DSP计算出来的高精度、高速的寻址定位指令码会在进行D/A转换时丢失精度,甚至会由于转换速度不够而丢失指令,成为系统的瓶颈,影响整个系统的性能。因此选择了ADI公司的高性能AD669芯片作为D/A转换器。该转换器为16位字长,可以实现2光轨精度的变速、定位。而且该转换器为双缓存结构,这种特殊的结构可以保证在DSP的控制下,轴、径向的变速、寻址同时完成,不会发生迟滞。
DSP要同时控制气浮主轴和径向进给两方面的输出,需采用特殊连接方式,如图6所示。D/A转换器选通端通过译码器(ADDRESS DECODE)与DSP的控制端相连,DSP操纵D/A转换器需要经过三条指令。DSP先通过第一条译码器转换数据写入DA1的一级缓存,再用第二条译码器将转换数据写入DA2的一级缓存。接着DSP输出第三条指令,译码器给出LDAC高电平,启动气浮主轴和径向进给两个方面的D/A转换器同时将数据从一级缓存打入到二级缓存,并开始转换;同时给出模拟控制量,控制外部的放大器和执行环节工作。
2.2 光栅信号处理
专用的运动控制器系统中除了核心的处理单元DSP以及与其相关的ROM和RAM存储器之外,最为关键的就是数字逻辑的通道,主要是光栅信号处理器。
光栅信号处理器采用CPLD的MAX7192作为承载器件。MAX7192仅有7ns的固定延迟时间,可以保证光栅和DSP的高速信号的匹配。
由于系统要求的寻址定位的精度很高,作为最后一环的D/A转换器一定要有高精度和高速的特性,否则前面由DSP计算出来的高精度、高速的寻址定位指令码会在进行D/A转换时丢失精度,甚至会由于转换速度不够而丢失指令,成为系统的瓶颈,影响整个系统的性能。因此选择了ADI公司的高性能AD669芯片作为D/A转换器。该转换器为16位字长,可以实现2光轨精度的变速、定位。而且该转换器为双缓存结构,这种特殊的结构可以保证在DSP的控制下,轴、径向的变速、寻址同时完成,不会发生迟滞。
DSP要同时控制气浮主轴和径向进给两方面的输出,需采用特殊连接方式,如图6所示。D/A转换器选通端通过译码器(ADDRESS DECODE)与DSP的控制端相连,DSP操纵D/A转换器需要经过三条指令。DSP先通过第一条译码器转换数据写入DA1的一级缓存,再用第二条译码器将转换数据写入DA2的一级缓存。接着DSP输出第三条指令,译码器给出LDAC高电平,启动气浮主轴和径向进给两个方面的D/A转换器同时将数据从一级缓存打入到二级缓存,并开始转换;同时给出模拟控制量,控制外部的放大器和执行环节工作。
2.2 光栅信号处理
专用的运动控制器系统中除了核心的处理单元DSP以及与其相关的ROM和RAM存储器之外,最为关键的就是数字逻辑的通道,主要是光栅信号处理器。
光栅信号处理器采用CPLD的MAX7192作为承载器件。MAX7192仅有7ns的固定延迟时间,可以保证光栅和DSP的高速信号的匹配。
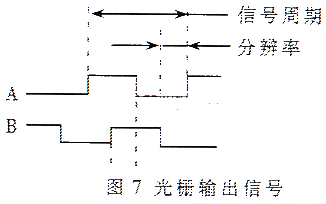
 工作台定位检测装置采用Renishaw公司的增量式圆光栅RGR-A和经光栅RLD10。圆光栅RGR-A用于测量回转工作台的转角,线光栅RLD10用于测量进给工作台的进给距离。测量光栅的输出信号经100细分,成为脉冲当量为50nm的RS422标准数字信号。
由于光栅的输出信号是相差90%26;#176;相位的数字信号,如图7所示,因此可以对光栅输出信号进行四倍频,以提高定位精度,同时完成判向。可以将光栅的四倍频电路与判向电路设计的一个整体,利用CPLD实现光栅接口电路的芯片化设计,包括光栅信号倍频、判向及可逆计数据。
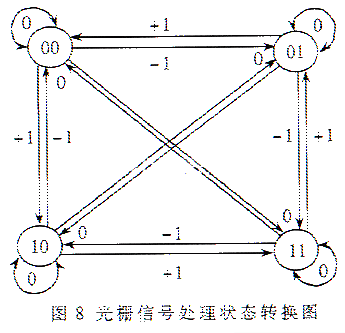
当正转时,光栅输出的A相信号超前B相信号90%26;#176;,则在一个周期内,AB两相信号共有四次相对变化:00→10→11→01→00;当反转时,光栅输出的A相信号滞后B相信号90%26;#176;,则在一个周期内,AB两相信号也有四次相对化:00→01→11→10→00。信号相对变化一次,可逆计数器就实现一次加(减)计数。从而实现了正反转情况下的四倍频计数。考虑到误操作下计数器应不作计数,因而得到光栅信号处理模块的状态转换图,如图8所示。
3 专用运动控制卡实物图
将设计的专用运动控制卡用于高密度母盘刻录机的控制系统中。通过实验发现,该控制卡能够较好地满足母盘刻录系统的要求,具有较高的精度。运动控制卡的实现图如图9所示。
工作台定位检测装置采用Renishaw公司的增量式圆光栅RGR-A和经光栅RLD10。圆光栅RGR-A用于测量回转工作台的转角,线光栅RLD10用于测量进给工作台的进给距离。测量光栅的输出信号经100细分,成为脉冲当量为50nm的RS422标准数字信号。
由于光栅的输出信号是相差90%26;#176;相位的数字信号,如图7所示,因此可以对光栅输出信号进行四倍频,以提高定位精度,同时完成判向。可以将光栅的四倍频电路与判向电路设计的一个整体,利用CPLD实现光栅接口电路的芯片化设计,包括光栅信号倍频、判向及可逆计数据。
当正转时,光栅输出的A相信号超前B相信号90%26;#176;,则在一个周期内,AB两相信号共有四次相对变化:00→10→11→01→00;当反转时,光栅输出的A相信号滞后B相信号90%26;#176;,则在一个周期内,AB两相信号也有四次相对化:00→01→11→10→00。信号相对变化一次,可逆计数器就实现一次加(减)计数。从而实现了正反转情况下的四倍频计数。考虑到误操作下计数器应不作计数,因而得到光栅信号处理模块的状态转换图,如图8所示。
3 专用运动控制卡实物图
将设计的专用运动控制卡用于高密度母盘刻录机的控制系统中。通过实验发现,该控制卡能够较好地满足母盘刻录系统的要求,具有较高的精度。运动控制卡的实现图如图9所示。
 本文设计了用于高密度母盘刻录系统的专用运动控制卡。该运动控制卡基于DSP中心处理器和CPLD逻辑处理器模块,实现了母盘刻录运动控制的快速性和高精度,能够很好地满足母盘刻录机运动控制的需要。
本文设计了用于高密度母盘刻录系统的专用运动控制卡。该运动控制卡基于DSP中心处理器和CPLD逻辑处理器模块,实现了母盘刻录运动控制的快速性和高精度,能够很好地满足母盘刻录机运动控制的需要。
引用地址:用于高密度母盘刻录系统的专用运动控制卡的研究
高密度母盘刻录过程中有两个主运动。一个是母盘的高速回转运动,另一个是刻录光学头相对母盘圆心的直线直线微进给运动。母盘刻录机的运动控制系统的最主要任务就是通过对两个主运动的精密控制,使得聚焦光斑以恒定线速度沿着等线距的外展型阿基米德螺旋线轨迹运动。为实现高精度恒线速刻录,这两个主运动都必须不断调速,并且保证极高的精度。刻录机刻录时的道间距很小,只有400nm,刻录过程中要求高速8.75%26;#215;10 4次,而且主轴电机最高的运行速度为1500RPM。在这样的较高转速的情况下要进行如此频繁的变速,控制的难度很大,传统的控制方式很难满足要求。此外,商品化的运动控制卡由于其具有很强的通用性,也无法完全满足母盘记得录系统的需要。为此,需要研制用于高密度母盘刻录系统的专用运动控制卡。
1 专用运动控制卡总体方案
高密度母盘刻录机的运动控制系统采用工控机和运动控制卡构成的主从式控制系统,并由下位机——运动控制卡完成主要数学运算。工控机负责人机交互界面的管理和控制系统的实时监控等方面的工作,运动控制卡完成运动控制的所有细节(包括脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等)。母盘刻录控制系统的总体结构如图1所示。
基于DSP的中心处理器的设计是响应速度最快、符合最小化原理、稳定性最高的方案,同时也是最复杂、最难的方案。母盘刻录机专用运动控制卡的结构如图2所示。
整个运动控制卡系统包括:DSP单元、DSP外部存储器单元、DSP-DA输出控制单元、ISA总线接口单元、双口RAM构成的ISA消息协议栈单元、系统译码单元和光栅信号处理单元。
系统的中心由DSP完成控制和伺服功能;自举ROM存有DSP数据系统主程序及系统初始化信息;数据RAM用于存储DSP运行时的数据;CPLD为数据交换逻辑接口,负责控制信号的输出和光栅信号的输入与处理(四倍频、计数等)。该数控系统通过ISA总线接口与工控机连接,完成控制过程中控制指令与状态参数的传递。
2 具体模块设计
下面具体介绍一下专用运动控制卡的各个模块的设计。
2.1 核心DSP的设计
高密度母盘刻录机控制系统的工作是属于运算密集型的任务,因此采用DSP作为中心处理器是非常好的选择。由于控制系统要求的精度很高,运算量非常大,而且运算的动态范围很大,所以定点的DSP无法满足运算的要求,不但速度跟不上,而且还会产生定标不当的问题,导致运算精度丢失,或是出现溢出错误。另外考虑到系统兼容性问题,最终选择了TI公司的高精度浮点运算处理器TMS320C32作为下位机的中心处理器。它具有可变宽度的存储器接口、更快速的指令周期时间、可设置优先级的双通道DMA处理器、灵活的引导程序装入方式、可重新定位的中断向量表以及可选的边缘/电平触发中断方式等。
2.1.1 核心DSP存储器电路设计
TMS320C32不具有片内的存储器,所以存储器的连接十分重要。C32通过24位的地址总线、32位的数据总线和三组选通信号IOSTRB、STRB0、STRB1访问外部存储器。TMS320C32总共提供16M字的存储空间,每字32bit,这16M字空间包括程序存储器、数据存储器及I/O空间。
TMS320C32对外部存储器的访问必须经过选通信号引脚,三组选通信号IOSTRB、STRB0、STRB1分别对应存储器映像的不同位置。IOSTRB对应的存储器映像从810000h到82FFFFh,总共128K字,当访问这部分存储空间时,IOSTRB使能。STRB0对应两块不连续的存储器映像,分别是从1001h到7FFFFFh(共8.192M字)和从880000h到8FFFFFh(共512K字)。STRB1对应从900000h到FFFFFFh的7.168M字。
2.1.2 核心DSP的BOOT LOADER设计
DSP有两种工作模式:微处理器方式(MP)和微计算机方式(MCBL)。微处理器方式(MP)不能自启动,必须由主机引导才能进入工作状态,也就是说必须由主机装入工作程序;微计算机方式(MCBL)具有自启动和程序自引导功能,这使得ATMS320C32的硬件系统设计极为方便。
TMS320C32芯片的引脚MCBL/MP用来选择工作方式,当该引脚为低电平时,工作于一般的微处理器方式;当该引脚为高电平时,则工作于微计算机方式。具体电路设计中的工作方式选择是通过一个巧妙的泻放电路来实现的,避免了使用复杂的逻辑器件,如图3所示。
2.1.3 核心DSP的中断设计
当TMS320C32工作在MCBL方式时,采用双矢量方案来响应中断请求,需在相应的中断矢量地址存放跳转指令,而不是直接存放中断服务程序的地址。对于TMS320C32来说,中断向量表是可以根据用户自己的需要重新定位的。其中,中断-陷阱向量表的表首指针为ITTP(the Interrupt-trap Table Pointer),由中断标志寄存器IF的31~16位组成。该指针左移8位(零位移入)即构成中断-陷阱向量表的表首基地址EA(ITTP),如图4所示。
图6
2.1.4 核心DSP的Reset设计
TMS320C3X的复位是通过在Reset引脚上置10个H1周期以上的低电平来实现的。通常情况下是加入专用的WatchDog复位电路。介在本系统中,巧妙地设计了复位脉冲发生器,省去了复杂的WatchDog电路,如图5所示。
可以算出RESET信号维持在COMS的低电平VIH=3.5V的时间约为0.05s>>10 TH 1(TH1=2.5%26;#215;10 -8s)。这样的RESET设计即可满足要求。
2.1.5 核心DSP与D/A转换器的设计
由于系统要求的寻址定位的精度很高,作为最后一环的D/A转换器一定要有高精度和高速的特性,否则前面由DSP计算出来的高精度、高速的寻址定位指令码会在进行D/A转换时丢失精度,甚至会由于转换速度不够而丢失指令,成为系统的瓶颈,影响整个系统的性能。因此选择了ADI公司的高性能AD669芯片作为D/A转换器。该转换器为16位字长,可以实现2光轨精度的变速、定位。而且该转换器为双缓存结构,这种特殊的结构可以保证在DSP的控制下,轴、径向的变速、寻址同时完成,不会发生迟滞。
DSP要同时控制气浮主轴和径向进给两方面的输出,需采用特殊连接方式,如图6所示。D/A转换器选通端通过译码器(ADDRESS DECODE)与DSP的控制端相连,DSP操纵D/A转换器需要经过三条指令。DSP先通过第一条译码器转换数据写入DA1的一级缓存,再用第二条译码器将转换数据写入DA2的一级缓存。接着DSP输出第三条指令,译码器给出LDAC高电平,启动气浮主轴和径向进给两个方面的D/A转换器同时将数据从一级缓存打入到二级缓存,并开始转换;同时给出模拟控制量,控制外部的放大器和执行环节工作。
2.2 光栅信号处理
专用的运动控制器系统中除了核心的处理单元DSP以及与其相关的ROM和RAM存储器之外,最为关键的就是数字逻辑的通道,主要是光栅信号处理器。
光栅信号处理器采用CPLD的MAX7192作为承载器件。MAX7192仅有7ns的固定延迟时间,可以保证光栅和DSP的高速信号的匹配。
工作台定位检测装置采用Renishaw公司的增量式圆光栅RGR-A和经光栅RLD10。圆光栅RGR-A用于测量回转工作台的转角,线光栅RLD10用于测量进给工作台的进给距离。测量光栅的输出信号经100细分,成为脉冲当量为50nm的RS422标准数字信号。
由于光栅的输出信号是相差90%26;#176;相位的数字信号,如图7所示,因此可以对光栅输出信号进行四倍频,以提高定位精度,同时完成判向。可以将光栅的四倍频电路与判向电路设计的一个整体,利用CPLD实现光栅接口电路的芯片化设计,包括光栅信号倍频、判向及可逆计数据。
当正转时,光栅输出的A相信号超前B相信号90%26;#176;,则在一个周期内,AB两相信号共有四次相对变化:00→10→11→01→00;当反转时,光栅输出的A相信号滞后B相信号90%26;#176;,则在一个周期内,AB两相信号也有四次相对化:00→01→11→10→00。信号相对变化一次,可逆计数器就实现一次加(减)计数。从而实现了正反转情况下的四倍频计数。考虑到误操作下计数器应不作计数,因而得到光栅信号处理模块的状态转换图,如图8所示。
3 专用运动控制卡实物图
将设计的专用运动控制卡用于高密度母盘刻录机的控制系统中。通过实验发现,该控制卡能够较好地满足母盘刻录系统的要求,具有较高的精度。运动控制卡的实现图如图9所示。
本文设计了用于高密度母盘刻录系统的专用运动控制卡。该运动控制卡基于DSP中心处理器和CPLD逻辑处理器模块,实现了母盘刻录运动控制的快速性和高精度,能够很好地满足母盘刻录机运动控制的需要。
上一篇:基于LabVIEW的多路仪器温度测控系统
下一篇:一种远程控制系统的设计与实现
 控制之美(卷1)——控制理论从传递函数到状态空间
控制之美(卷1)——控制理论从传递函数到状态空间 HA2-5152/883
HA2-5152/883
小广播
热门活动
换一批
更多

最新应用文章
更多精选电路图






更多热门文章
更多每日新闻
- Allegro MicroSystems 在 2024 年德国慕尼黑电子展上推出先进的磁性和电感式位置感测解决方案
- 左手车钥匙,右手活体检测雷达,UWB上车势在必行!
- 狂飙十年,国产CIS挤上牌桌
- 神盾短刀电池+雷神EM-i超级电混,吉利新能源甩出了两张“王炸”
- 浅谈功能安全之故障(fault),错误(error),失效(failure)
- 智能汽车2.0周期,这几大核心产业链迎来重大机会!
- 美日研发新型电池,宁德时代面临挑战?中国新能源电池产业如何应对?
- Rambus推出业界首款HBM 4控制器IP:背后有哪些技术细节?
- 村田推出高精度汽车用6轴惯性传感器
- 福特获得预充电报警专利 有助于节约成本和应对紧急情况
更多往期活动
11月16日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号