随着工业规模的不断扩大,接入电力系统的冲击性负荷急剧增加,电能质量问题变得越来越严重,从而造成产品质量下降甚至生产过程中断。根据各国学者和电力部门统计,在电力系统的各种电能质量问题中,电压暂降的危害最大。目前,最有效的补偿装置是动态电压恢复器(DVR)。
传统的DVR在补偿电压暂降时,其所需能量由并联于所补偿电网的整流器提供,缺点是不能补偿深度电压暂降。因此有学者提出由储能装置来提供能量。常见的储能装置有:蓄电池、超级电容、超导储能装置以及飞轮储能装置。与其他几种储能方式相比,飞轮储能具有高储能量、长寿命、高效率、无污染等特性。因此在飞轮电池以及工业用UPS电源等领域得到广泛应用。飞轮储能是一高速旋转的飞轮质体作为机械能量储存的介质,利用电机和能量转换控制系统来控制能量的输入(储存能)和输出(释放能)。目前,产品化的飞轮储能单元最高指标通常为储能量2~5 kWh,功率250 kW,若要求更高功率、更大储能量则需采用飞轮储能单元并联运行来实现。文献对多台飞轮并联运行的控制策略进行了研究,提出了一种以飞轮可释放能量为比例分配各台飞轮储能装置输出功率的控制策略,此控制策略会导致各台并联飞轮的充放电次数不均匀。
针对以上不足,本文提出了一种基于飞轮储能的新型动态电压恢复器;详细分析了该系统的工作原理和各部分的控制策略;针对飞轮并联运行提出了一种新的放电控制策略;最后对系统进行了仿真验证。
1 电路拓扑
基于飞轮储能的DVR的拓扑结构如图l所示,其主要由DVR变换器、滤波器、旁路开关、串联变压器、变换器A、电感L和飞轮储能阵列(FESA)组成。
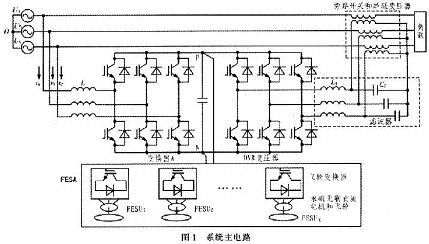
DVR变换器、滤波器、旁路开关和串联变压器一起组成串联型电压恢复器,变换器A和电感L构成PWM整流器,飞轮储能阵列由多台飞轮储能单元(FESU)并联组成,飞轮储能单元由飞轮变换器、永磁无刷直流电机和飞轮3部分组成。电网电压正常时,飞轮处于充电状态:在电网电压发生暂降时,DVR变换器经串联变压器向电网注入补偿电压,从而保证负载电压是额定电压。浅度电压暂降时能量由电网提供;深度电压暂降时能量由飞轮提供。
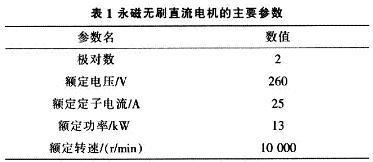
驱动电机采用三相永磁无刷直流电机,因其具有运行可靠、免维护、高效率以及调速性能好的特点,其主要参数如表l所示。
2 系统的控制策略
2.1飞轮充电控制
飞轮的充电控制采用双环控制结构,外环是转速环,内环是电流环。其中,速度调节器采用复合控制。在启动阶段,希望转速快速上升,而对控制精度要求相对较低,采用恒转矩限流启动;在调速阶段,采用恒功率充电模式,随着转速的升高,输入电流反比减小,可以减小不平衡磁拉力对转子稳定性的影响,恒功率充电以系统能承受的最大功率P*为加速度功率;当速度达到稳态时,希望有较高的稳态精度,采用PI控制。
2.2 飞轮放电控制
在飞轮放电过程中,电机运行于制动状态,随着转速的降低,电压也随之降低。为了得到恒定的直流母线电压,采用电机回馈制动的半桥调制方式。
各台并联飞轮属于同一规格,电气参数基本一致;前后两次电压暂降间隔足以让所有飞轮转速都上升到额定转速,故功率和储能量相等;为了减少系统损耗,每次放电时投入运行的飞轮个数应尽可能少。飞轮放电控制的关键点是如何计算放电的飞轮台数以及每台飞轮的输出电流指令值。
各台飞轮的充放电次数为:T1≥T2≥…,≥TN,则放电控制策略如下:
1)按照充放电次数由少到多依次给各台飞轮排序,如充放电次数相同,则转速高者序列号小。
2)根据式(1)确定进入放电状态的飞轮台数m。
![]()
式中,Pmaxi为i台飞轮的最大输出功率;P*是需要输出的功率指令值。
3)当P*![]() ,FESUm的输出电流指令值为
,FESUm的输出电流指令值为![]() 。
。
随着能量的释放,飞轮转速下降,故储能量和输出功率随之减小,当原有投入放电的飞轮不能满足负载需求时,投入放电的飞轮台数以及各台飞轮的输出电流指令值需重新计算。
将之前进入放电状态的飞轮的序列号都增加1,然后返回1)重新计算。当电网电压恢复正常时,投入放电状态的飞轮的充放电次数都增加1。由上述分析可得飞轮放电的控制框图如图2所示。
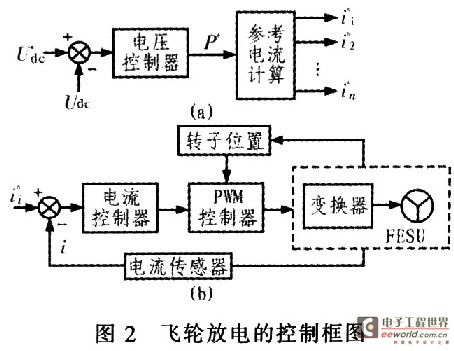
2.3 DVR变换器的控制
补偿电压的输出需同时实现两个目标:高动态响应速度和高稳定精度。前馈控制可以显著提高系统的动态响应速度,缩短补偿电压发出的时间。反馈控制可以提高系统的稳定裕度。因此,采用由前馈控制、电压瞬时值和滤波电容电流瞬时值反馈控制构成的复合控制策略。
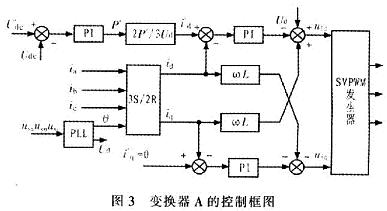
2.4 变换器A的控制
变换器A的控制目的是控制直流母线电压恒定的同时,实现交流侧输入电流的正弦化且与电网电压同相位。
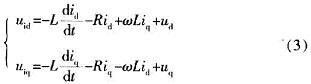
变换器在abe三相静止坐标系下的方程为:
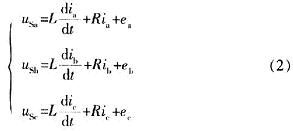
式中,L为与电网相连的滤波电感的电感值,将功率开关管损耗等效电阻同滤波电感等效电阻合并为R,usa、usb、usc为电网三相电压,ia、ib、ic为变换器交流侧三相电流,ea、eb、ec为变换器输出的三相电压。
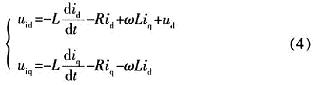
通过坐标变换将该数学模型转换至同步旋转坐标系中,变换器在同步旋转坐标系下的数学模型为:
式中,ud、uq为三相电网电压在同步旋转坐标系下的投影;id、iq为变换器交流侧三相电流在同步旋转坐标系下的投影。
选取同步旋转坐标系的d轴与电网a相电压矢量重合,则uq=O,式(3)可进一步简化为:
这说明当电网电压稳定时,控制了变换器d轴电流即控制了输入的有功功率;控制了变换器q轴电流即控制了输入的无功功率。若要实现单位功率因数控制,即输入的无功功率为零,只要令变换器q轴电流设定值![]() 即可。
即可。
由式(4)可知,该数学模型存在交叉耦合项,因而给控制器设计造成一定难度。为此,采用前馈解耦控制策略,当电流调节器采用PI控制器时,则uid和uiq的控制方程如下:
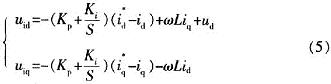
式中,Kp、Ki为电流内环比例系数和积分系数;![]() 为电流指令值。
为电流指令值。
将式(5)代人式(4),并化简得:
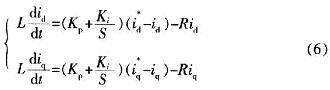
式(6)实现了电流内环的解耦控制。由上述分析可得变换器A的控制框图如图3所示。
[page]
3 仿真结果
针对提出的拓扑结构和控制策略,利用Matlab/Simulink进行仿真研究。系统主要参数如表2所示。其中,FESA由2台FESU并联组成。
3.1 飞轮充电状态
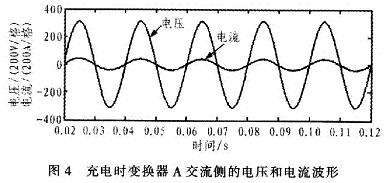
图4是飞轮充电时变换器A交流侧的电压和电流波形,由图4中可以看出电流与电压同相,实现了电流对电压功率因数控制。图5是飞轮充电过程中,电机A相电流波形。相电流波形为方波,在换相过程中,相电流有一定的波动。
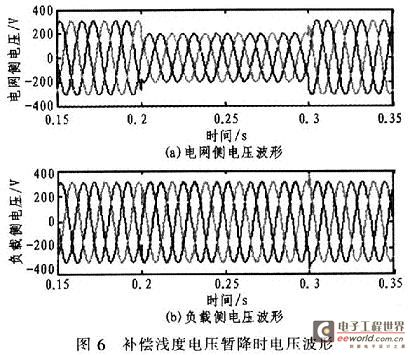
3.2 浅度电压暂降补偿状态
在浅度电压暂降补偿状态时,能量由变换器A提供。图6给出了电压暂降时的动态补偿波形,由图6可以看出系统补偿动态响应速度快,同时具有良好的稳定性和跟踪性能。
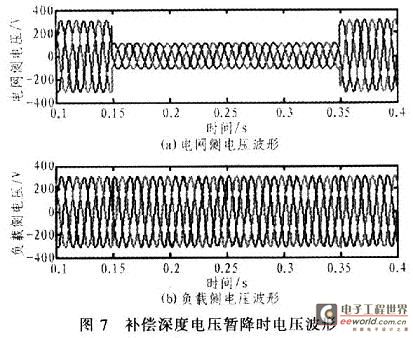
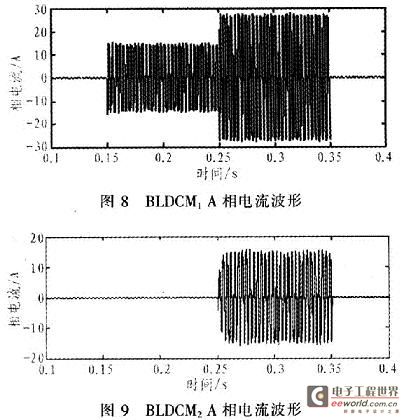
3.3 深度电压暂降补偿状态
在深度电压暂降补偿状态时,能量由飞轮提供。图7给出了动态补偿波形。图8和图9是飞轮放电过程中,电机的相电流波形。在O.15~O.25 s之间,BLDCMl处于放电状态;在O.25 s时负载突增,两台飞轮都进入放电状态。
4 结论
为了克服传统动态电压恢复器和飞轮储能单元的缺点,提出了一种基于飞轮储能阵列的新型DVR,其可对深度电压暂降进行补偿;对飞轮储能阵列运行于放电状态的控制策略进行了研究,提出了一种新型的放电控制策略。利用Matlab/Simulink对所提出系统进行了仿真分析,仿真结果表明所提出拓扑结构及控制策略的正确性和有效性。
上一篇:基于DS2770的非稳压电源脉冲充电器
下一篇:开关电源中RC缓冲电路的设计
推荐阅读最新更新时间:2023-10-18 14:59

 发电厂电气部分 第五版 (苗世洪)
发电厂电气部分 第五版 (苗世洪) Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用
Vishay线上图书馆
- 选型-汽车级表面贴装和通孔超快整流器
- 你知道吗?DC-LINK电容在高湿条件下具有高度稳定性
- microBUCK和microBRICK直流/直流稳压器解决方案
- SOP-4小型封装光伏MOSFET驱动器VOMDA1271
- 使用薄膜、大功率、背接触式电阻的优势
- SQJQ140E车规级N沟道40V MOSFET







- 【有奖知识问答】光电子,点亮梦想!
- 【EEWORLD第七届社区明星人物】9月明星人物
- 有奖直播|堵车路上听什么?新世代车载音频系统及软件定义汽车
- 闯关赢优惠券,蝴蝶粉最低可29元体验NUCLEO-L452RE
- “玄铁杯”第三届RISC-V应用创新大赛—国产高性能RISC-V Linux开发板LicheePi 4A报名专场,万元奖金,邀您奔赴开源设计盛宴
- 西门子|加速数字化转型电子产品,智能制造解决方案
- 下载泰克高速接口标准电子书,参与翻盖有礼,惊喜多多!
- 阅读TI DLP ® 博文,带你走进不一样的视野!
- 下载喽:PCIe要了解的10件事和识别协议的BSX系列BERTScope误码率测试仪技术资料
- TI DLP 有奖创意征集




 京公网安备 11010802033920号
京公网安备 11010802033920号