而被称之为体声波(BAW)的新一代创新MEMS技术正为这些问题提供了解决方案。体声波技术正被用于开发一类全新的固态MEMS陀螺仪,其不仅能很好满足低功率、小尺寸、低成本及高产量等要求,同时还提高了产品的总体性能。
陀螺仪技术的局限性
所有商用MEMS陀螺仪的基本原理均相同,即在旋转状态下同一结构的两个振动模态之间因科里奥利力发生的能量转移。指定旋转产生绝对加速度的基本运动学关系用于形成耦合微分方程,所得方程反过来又指定驱动振动模态和检测振动模态下的运动。对所得方程进行求解后,可以得到下述陀螺仪灵敏度(xSNS/Ω)与工作频率(ωDRV、ωSNS)、Q值(Q)及驱动模态位移振幅(xDRV)之间的关系表达式。
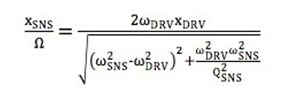
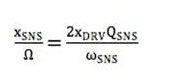
从这个方程式中可以明显看出,旋转灵敏度会随着驱动模态位移振幅的增加而增加。然而,由于功率限制增加,大驱动振幅主要依靠器件整体刚度(即工作频率)的减小来实现。因此,市面上销售的陀螺仪工作频率都在5kHz~50kHz之间。但这样的工作频率不仅限制了MEMS振动陀螺仪对振动和冲击的耐受性能,同时还造成其模态匹配优势难以发挥。该优势指的是旋转灵敏度对机械品质因数的依赖程度,如下列在两个工作频率相同(ωDRV = ωSNS)的特殊情况下的方程式所示[1]:
为了获得接近20~50k的机械放大,现有的MEMS陀螺仪必须在高真空条件下工作,以消除空气阻尼的影响。要达到这样的真空水平通常会耗费较高的成本,而且还必须实施复杂的大功耗力反馈操作来解决开环带宽限制(ωSNS/ 2QSNS)问题。
体声波陀螺仪技术简介
针对目前普遍存在的局限性,佐治亚理工学院集成MEMS(GT-IMEMS)实验室基于圆盘简并体声波模态开发了一种全新的MEMS振动陀螺仪。BAW陀螺仪依赖两种简并BAW模态(工作频率一般在1MHz~10MHz范围内)之间的能量转移来运行。
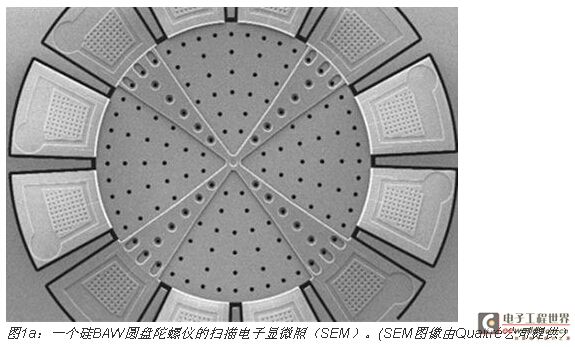
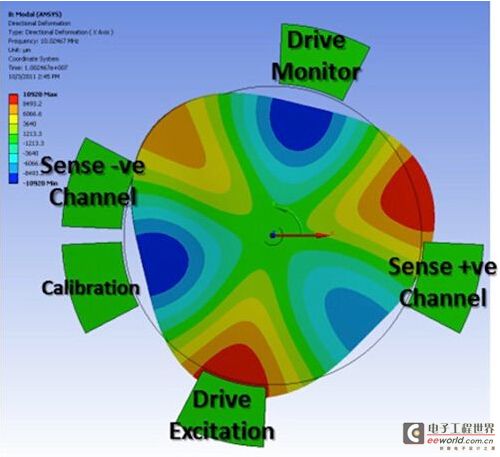
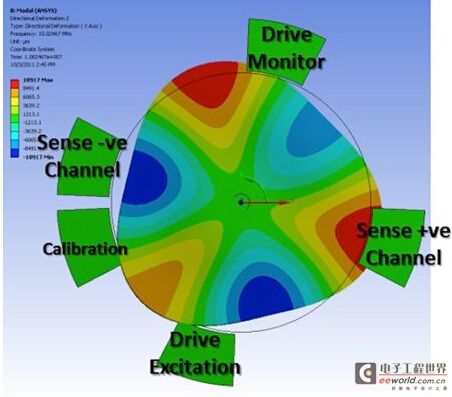
图1b:“n=3”面内简并BAW模态的可视化表示用于检测垂直于平面的旋转(图片由Qualtré公司提供)
刚度的增加使体声波陀螺仪在生产和现场运行过程中均不受静摩擦力的影响,从而消除了现有基于平移的振动音叉架构中关于良品率和可靠性一个重大问题。在更高的频率下工作可以进行高Q值模态匹配操作,从而实现出众的旋转灵敏度,同时无需大驱动位移振幅、高真空水平及力反馈架构。
图1a显示了一个在厚度为35μm的绝缘体上硅(SOI)衬底上实现的、直径为600 μm的声体波圆盘陀螺仪的SEM图像[1]。该器件利用一对简并面内“n=3”10MHz体声波模态,检测垂直于圆盘平面的旋转信号(如图1b所示)。
HARPSS:多功能、可扩展的制造平台
基于MEMS的产品在演进过程中最重要的一方面,就是产品设计与生产设计之间的共生关系。就体声波MEMS而言,体声波传感器设计的性能优势通过利用高深宽比多晶与单晶硅结合(HARPSS)制造工艺的多功能性和可扩展性得以实现。实现体声波圆盘陀螺仪设计,要求制造平台无需采用昂贵的纳米光刻技术,即可将横向和垂向上的电容性气隙均缩减到亚微米范围。
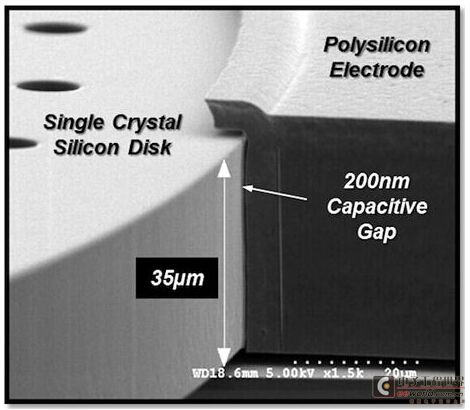
图2:由HARPSS工艺定义的体声波陀螺仪中电容性气隙SEM近景图片(SEM图像由Qualtré公司提供)。
HARPSS工艺能够形成几十微米厚且电容性气隙自对准的电隔离多晶与单晶硅微结构。这种高深宽比电容性气隙(如图2所示)显著提高了电容换能的效率,并且为振动硅微结构提供了有效的高频率界面。该结构可在电容式MEMS器件中产生最高的信噪比,同时获得出众的噪声密度,从而提高分辨率。集动态范围、偏置稳定性和抗振动性于一身的传感器
在运动检测中,许多应用会对较高和较低探测范围提出各种要求。高尔夫模拟器就是其中之一,它要求传感器不仅能够探测到发球挥杆等剧烈动作,同时还能捕捉到打球入洞或切击等细微动作。所谓动态范围是指最大可探测信号与最小可探测信号之比。
体声波陀螺仪的工作频率和构造使之最大拥有±5000°/s的动态范围和卓越的线性度(图3),因而设计人员可以基于单个传感器设计方案创建出一系列广泛的应用。这一特性对于游戏平台尤具吸引力,包括Wii遥控器等专用控制器或手机、平板电脑等频繁更新其设计的多用途消费类游戏平台。
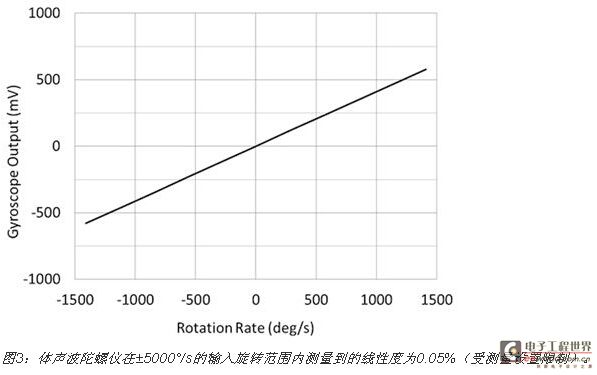
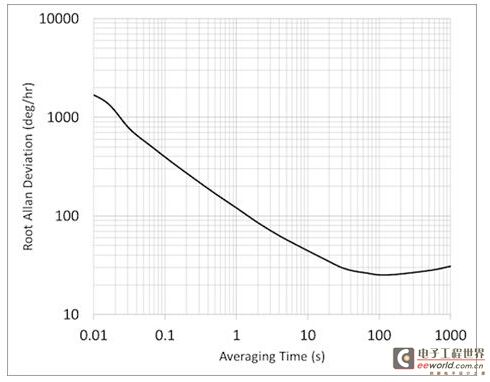
图4.体声波陀螺仪所测得的艾伦标准差曲线表明其偏置不稳定性为25°/h。
体声波陀螺仪工作频率范围在标准CMOS接口电路的闪烁噪声范围之外,这能使检测限制缩小。这将改进系统中的整体噪声,从而产生如图4所示的出众的偏置漂移性能,图中显示了所测到的某个典型体声波陀螺仪的艾伦标准差(root Allan deviation)曲线。
也许经过HARPSS制造工艺生产出来的体声波陀螺仪最突出的性能优势在于其抗随机振动和抗冲击性能。图5将其与当今消费类市场上常见的音叉架构陀螺仪做了对比。
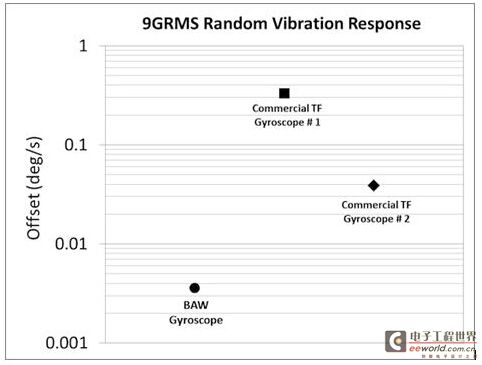
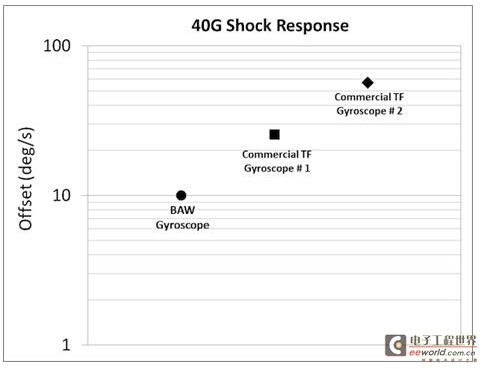
图5.随机振动和冲击测试中陀螺仪输出偏置漂移对比,显示了体声波技术相较现有音叉架构的优势。
未来:功率更低、集成度更高以及更多创新
消费者要求产品不仅便携而且可以随时使用。这些无线产品只能通过电池供电,迫使设计人员始终将满足性能需求、提高电池续航能力及减少尺寸/重量放在首位。功耗较小的器件在工程设计权衡中总是占据一定优势。体声波陀螺仪的高频率传感器设计结合其高Q值机械增益和较小的驱动模态位移(低于20nm),能够产生最小的每轴功率。功耗的降低意味着电池续航时间更长,同时消费者对于各个类型的可穿戴设备或电池供电的手持式设备的接受程度也会更高。
对于更看重性能和鲁棒性的工业和汽车应用来说,体声波陀螺仪体现了抗振动性、低噪声和线性度的完美结合。在汽车领域,防侧翻等关键安全应用正成为主流,同时在先进驾驶员辅助系统(ADAS)中利用陀螺仪控制进行雷达定位等新应用也逐渐普及。例如,在工业生产领域,陀螺仪正在逐步成为机器人自适应位置控制系统的关键组成部分。这些应用需具备良好的性能和鲁棒性,而体声波技术在这两方面颇具优势。
当旋转与其他形式的惯性感应相结合时,更多采用体声波MEMS技术的动态应用可以从中受益。个人或无人驾驶汽车导向系统要求配备惯性测量单元(IMU),即囊括了加速计、陀螺仪、压力传感器及磁力计等元件的组合器件。HARPSS处理技术常常被称为MEMS的“CMOS”,它能将高性能三轴微陀螺仪与三轴微加速计,甚至还有三轴磁强计集成在同一衬底上,从而使IMU等器件拥有非常好的性能/尺寸/成本比。体声波陀螺仪可以在接近大气的条件下保持高Q值操作,因而不会限制同一平台上的压力传感器和加速计等器件的性能。
除了导航功能外,IMU还具有6~9自由度的感应功能,因而可为医疗影像设备、外科手术器械及先进修复术等应用提供超精细分辨率。此外,IMU也可以用于精度要求可能较低且近期之内没有可用或实际解决方案的应用上。更具说服力的例子包括智能高尔夫球杆、网球拍及棒球棒等能跟踪和记录运动员挥拍/杆过程中的每个动作,从而有利于用户完善球技。加速计会测量加速度、振动及挥动平面,而陀螺仪则会测量用户在挥拍/杆过程中手的内转或扭转动作。每种运动通常都会有自己的应用,每秒最高能够从传感器处记录到1000个数据点,并向用户准确展示他们击球的力度、速度和角度。甚至还有3D模型能够展示整个挥拍/杆过程,从而分析出用户的错误之处。每种运动都有专门针对相应需求定制的应用,它能记录运动或练习过程中收集的数据,并通过蓝牙将数据发送到智能手机或个人电脑上加以分析。
结论
采用当前尺寸的体声波陀螺仪的独特之处在于,其在提供低噪声性能和大动态范围及卓越线性度的同时,还具有卓越的抗温度和机械冲击/振动影响的能力,而且功耗也较低。该器件及其他基于HARPSS制造工艺的创新设计方案为系统提高集成度、减少尺寸、降低成本及降低复杂度提供了良好平台。体声波陀螺仪将会帮助设计工程师打造出此前无法实现的新产品,从而帮助他们在产品设计中实现创新,做到与众不同。
上一篇:射频/微波PCB的信号注入方法
下一篇:基于STM32的语音导览系统的设计
推荐阅读最新更新时间:2023-10-12 22:53

 机电一体化技术 (刘宏新主编)
机电一体化技术 (刘宏新主编) 模拟集成电路设计与仿真
模拟集成电路设计与仿真
Vishay线上图书馆
- 选型-汽车级表面贴装和通孔超快整流器
- 你知道吗?DC-LINK电容在高湿条件下具有高度稳定性
- microBUCK和microBRICK直流/直流稳压器解决方案
- SOP-4小型封装光伏MOSFET驱动器VOMDA1271
- 使用薄膜、大功率、背接触式电阻的优势
- SQJQ140E车规级N沟道40V MOSFET











 京公网安备 11010802033920号
京公网安备 11010802033920号