当前国内机器人发展迅猛,尤其是工业机器人领域。但在机器人的反应速度、精度上,国内外产品还是存在一定差距的,那么关键点是在哪呢?



关键字:机器人 伺服电机
编辑:杜红卫 引用地址:如何提升机器人伺服电机的响应性能

关键在于机器人的核心零部件——伺服电机。机器人在运行过程中,是通过伺服电机的驱动实现多自由度的运动的。如果对机器人运行的动作速度、精度要求高的话,实际就是要求伺服电机的响应速度、控制精度要足够高。

而在机器人实际运行时,往往伺服电机是处于各种加减速、正反转状态,那就对伺服电机的短时过载能力、惯量适应范围、频率响应带宽、转速/扭矩响应时间提出了很高的要求。
其中一个非常重要的指标就是频率响应带宽,它决定了该伺服系统对指令的响应速度快慢,是机器人设计者的重要关注指标。

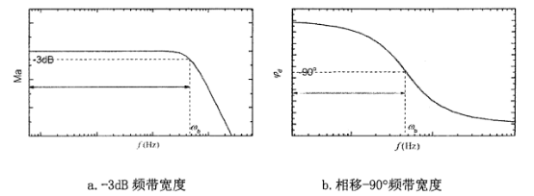
伺服电机频率响应带宽的定义:伺服系统能响应的最大正弦波频率就是该伺服系统的频率响应带宽。用专业一些的语言描述,就是幅频响应衰减到-3dB时的频率(-3dB带宽),或者相频响应滞后90度时的频率。
更具体一点,像机械部标准《交流伺服驱动器通用技术条件》(JB T 10184-2000)中规定了伺服驱动器带宽的测试方法:驱动器输入正弦波转速指令,其幅值为额定转速指令值的0.01倍,频率由1Hz逐渐升高,记录电动机对应的转速曲线,随着指令正弦频率的提高,电动机转速的波形曲线对指令正弦波曲线的相位滞后逐渐增大,而幅值逐渐减小。相位滞后增大至90度时的频率作为伺服系统90度相移的频带宽度;幅值减小至低频时0.707倍的频率作为伺服系统-3dB频带宽度。

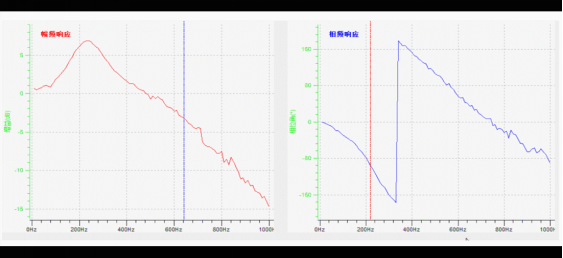
频率响应带宽国标测试结果
可以说,频率响应带宽越快,伺服系统就可以对变化更快的指令实现及时响应,即使工业机器人的动作再复杂,也能及时响应,驱动机器人的每一个关节位置控制到位。
而影响频率响应带宽的因素有很多,像伺服驱动器或者控制系统参数、传动链的刚度或精度、传动间隙、负载惯量等都会对伺服系统的响应带宽产生影响。过去业内很多研究者由于缺乏测试装备,故只能通过加实际负载的测试来判断伺服系统及机器人的响应性能,属于定性分析,无法定量分析。因此国内的伺服系统目前在响应速度一块仍需加强,像一般的伺服电机,响应带宽最高只能做到几百Hz左右,比较优质的能做到1kHz;而国外的产品,如日系的安川、三菱、松下等,却在多年以前已突破2kHz的关卡。

针对机器人及伺服电机行业的用户需求,致远电子推出MPT混合型电机测试系统,面向伺服电机行业应用,可独家提供频率响应带宽、转速/扭矩控制响应等伺服电机前沿测试功能,满足国内外用户对于伺服电机产品的功能研究和产品研发需要,为中国的“智能制造”目标提供枪炮弹药。
上一篇:Diodes公司高压单极霍尔效应开关为3V至28V操作而优化
下一篇:如何发现企业电网污染
推荐阅读最新更新时间:2023-10-12 22:56
机器人的创新 灵感来自大自然
随着工业机器人产品应用场景的扩展,对末端的要求也越来越多样化,尤其是协作机器人的兴起,我们需要不同类型的夹具来完成各不同物件的拾放。通常,工业机器人抓取物体的材料、形态都是各式各样的,所以行业需要适配不同的夹抓才能满足任务的要求。
目前,末端工具有气动、电动和的方式,前两种比较常见于轻量版的工业机器人,具有环保、节能等特点,广泛应用于不同场景的自动化任务中。而末端执行器制造商也有很多,例如德国雄克、 丹麦OnRobot、德国SCHmalz、德国Festo和美国ATI等知名品牌,这些领先企业通过不断创新推出了功能强大、适用于各种工业机器人产品的夹抓。
最近,协作机器人末端工具领域的领导厂商OnRobot宣布,公司将
[机器人]
全球近日超20亿融资,移动机器人市场依旧火热

斯坦德机器人完成数亿元人民币 Pre-C 轮融资 1月4日,斯坦德机器人宣布近期完成数亿元人民币Pre-C轮融资,本轮融资由博华资本领投、蔚来资本跟投,老股东奇绩创坛、源码资本等继续加投。资金将主要用于AMR新品研发、行业深耕、人才引入和全球市场的拓展。 斯坦德机器人曾在2017年6月获数千万人民币Pre-A融资,由合创资本领投,青橙资本和要弘创投跟投。2018年10月获数千万元人民币的A轮融资,投资方为国科嘉和。2020年5月获奇绩创坛战略投资。2020年7月,完成由光速中国和源码资本联合领投的1亿元人民币B轮融资。 千巡科技完成数千万元的 Pre-A 轮融资 近期,千巡科技(深圳)有限公司宣布完成
[机器人]

K5机器人的建立是为了利用传感器和人工智能软件来弥补不足
未来的警察五英尺高,重约400磅。别担心,并不是你想的那样。Knightscope表示,这是一个完全自主的数据安全机器,其目的是利用现代信息技术加强安全和执法。K5并不是一个持枪的机器人警察。根据美国的人口普查,该国有3.25亿人,但负责保护和服务的当地、州及联邦警察却只有70万名,对于完成这项任务,并没有足够的眼睛和耳朵,K5机器人的建立是为了利用和人工智能来弥补不足。
4月13日发表了一篇文章,讲述了银行和零售商在网上监视诈骗犯的软件工具。行为生物识别技术是一个数据科学领域,它追踪我们在与交互时如何打字、点击和滑动,超越了密码和等静态指标,因为它不易被察觉,用户永远不会知道数据正在被收集。
中国正在把这一
[机器人]
详细介绍焊接机器人的工作原理
焊接机器人是一种,它可以执行焊接任务而不需要人类操作。它的,主要可以分为以下几个步骤:
1. 任务规划:
焊接任务规划是指如何将焊接任务分解成一系列的子任务,并为机器人规划执行路径,以实现高效的自动化焊接。机器人需要先了解焊接任务的要求,这包括焊接位置、焊接方式、焊接速度等。任务规划过程中还需要考虑机器人的姿态、动作规划、合理分配运动范围等。
这一过程通常可以分为以下步骤:
1.任务分解和定义:首先需要对焊接任务进行分解和定义,包括焊接工件的几何形状、焊缝位置、金属材料、焊接方法等信息。
2.机器人路径规划:根据任务定义,需要对路径进行规划,包括将机器人移动到焊接位置的路径设计、焊接头的
[机器人]
ABB换帅,少壮派盯上中国工业机器人?
据ABB中国相关负责人透露,已72岁高龄的ABB集团董事长冯恩博将不再参与2015年4月年度股东大会的董事会竞选,ABB集团董事会已经一致提名傅赛(Peter Voser)接替冯恩博担任董事长,这届董事会的其他成员届时也将竞选连任。
瑞士巨头在21世纪最初几年遭遇亏损困境,傅赛在2002年至2004年10月担任ABB集团首席财务官,是当时帮助ABB集团扭亏为盈、重塑市场定位并且开启长期盈利增长之旅的关键人物。
冯恩博从2007年5月开始担任ABB集团董事长,任期之内ABB集团销售收入从2006年的230亿美元增长到2013年的420亿美元,净收益也实现了翻番;冯恩博在任期之内也奠定了ABB集团在高压直流断路器、低压断路
[嵌入式]
这是要瞬间变身的节奏,全球1/4机器人都被中国买走
根据美国《华尔街日报》在近期的报道显示,目前全球的工厂的众多工作岗位是由中国人来做,而中国逐渐开始将这些工作交由机器人负责。据国际机器人学联合会(International Federation of Robotics)的数据,预计到2016年年底,中国安装的工业机器人数量将居世界首位。
加快普及速度 中国工业机器人将迎来井喷发展
中国工业机器人将迎来井喷发展(图片来自Spiceworks)
华盛顿信息科技与创新基金会(Information Technology And Innovation Foundation)经济研究分析师纳赫尔(Adams Nager)称,中国正在把依赖手工劳动的行业的生产转至国外
[嵌入式]
MulitCuber 999机器人首个破解9x9x9魔方
配备 Galaxy S4 、由 首席工程师 Gilday 和安全系统工程师 Dobson 共同设计的 Cubestormer III 机器人在英国 Big Bang 博览会上以 3.253 秒的成绩打破了机器人破解魔方的 5.27 秒的世界纪录!
[机器人]
内蒙古首例利用智能定位机器人手术成功实施
昨日,在内蒙古自治区肿瘤医院微创介入科手术室,一位子宫内膜癌患者成功接受了放射性粒子植入治疗手术,手术的主刀医生是内蒙古自治区肿瘤医院微创介入科主任冯铁虹,但这次的手术多了个“助手”智能定位机器人。据悉,这是智能定位机器人落户内蒙古自治区肿瘤医院做的第一台手术,该院也成为自治区首家装备智能定位机器人的医院。 CT扫描寻找病灶、数据输入智能定位机器人、智能定位机器人给出穿刺目标、机器人引导手术、植入放射性粒子……一个小时不到就圆满地完成了手术。记者了解到,智能机器人定位系统有效地避免了二维视野的单眼视觉图像没有深度感的缺陷,使医生可以在手术中定位更精确,操作更灵活。 “精准穿刺是手术成功的关键,智能机器人定位系统能够完成精准的三维定
[机器人]
 滑模变结构控制理论及应用 (陈智梅)
滑模变结构控制理论及应用 (陈智梅) 硬件架构艺术:数字电路的设计方法与技术
硬件架构艺术:数字电路的设计方法与技术
小广播
热门活动
换一批
更多


Vishay线上图书馆
- 选型-汽车级表面贴装和通孔超快整流器
- 你知道吗?DC-LINK电容在高湿条件下具有高度稳定性
- microBUCK和microBRICK直流/直流稳压器解决方案
- SOP-4小型封装光伏MOSFET驱动器VOMDA1271
- 使用薄膜、大功率、背接触式电阻的优势
- SQJQ140E车规级N沟道40V MOSFET

最新电源管理文章
- 英飞凌推出符合ASIL-D标准的新型汽车制动系统和电动助力转向系统三相栅极驱动器 IC
- 南芯科技推出80V升降压转换器,持续深耕工业储能市场
- 法雷奥与罗姆联合开发新一代功率电子领域
- 贸泽电子开售能为电动汽车牵引逆变器提供可扩展性能的 英飞凌HybridPACK Drive G2模块
- Vishay推出采用eSMP®系列SMF(DO-219AB)封装的全新1 A和2 A Gen 7 1200 V FRED Pt®超快恢复整流器
- Littelfuse推出高性能超级结X4-Class 200V功率MOSFET
- 恩智浦发布首个超宽带无线电池管理系统解决方案
- 非常见问题解答第223期:如何在没有软启动方程的情况下测量和确定软启动时序?
- Vicor高性能电源模块助力低空航空电子设备和 EVTOL的发展






更多热门文章
更多每日新闻
更多往期活动
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号