摘要:MCDC 2805型运动控制器是专为Faulhaber集团生产的直流微电机量身定作的。它由功能强大的16位微处理器和性能卓越的数字滤波器组成。文中介绍MCDC 2805的硬件结构、外型封装、RS-232串口的功能及RS-232串口的ASCII指令及其应用。 关键词:RS-232 运动控制器 电机编码分辨率 直流电机 MCDC 2805型运动控制器是专为Faulhober集团生产的直流微电机量身定作的。它由功能强大的16位微处理器和性能卓越的数字滤波器组成。主要功能包括速度控制、速度模式斜波、三角形、梯形等复杂复合运动运行模式及位置控制、附加控制模式等。所有滤波器参数均能通过RS-232串口设置,并保存在运行控制器内的EEPROM中,因此,MCDC 2805能根据实际需要完全独立工作。 1 MCDC 2805引脚功能及内部结构 MCDC 2805的封装结构如图1所示。其中,左侧V1为RS-232 TXD(RS-232发送端);V2为RS-232RXD(RS-232接收端);V3为AnalogGND(模拟地);V4为FaultOutput(故障输出端);V5为AnalogInput(模拟输入端);V6为+24V(电源正极);V7为GND(地);V8为Input3(第三输入端)。中间是9针D型串口,其中2号是RS-232 RXD(RS-232接收端);3号是RS-232 TXD(RS-232发送端);5号是GND(地)。右侧M1为Input#5(第五输入端);M2为Input #4(第四输入端);M3为Channel A(编码器A通道);M4为Channel B(编码器B通道);M5为VCC(+5V)(系统提供+5V);M6为SignalGND(信号地);M7为Motor+(接电机正极);M8为Motor-(接电机负载)。其中,故障输出端V4也可通过设置来实现下述功能:数字信号输出端;限位开关输入端;转向控制输入端。而且,当V4设置成输入状态时,在输入信号连接到此端口前,使用REFIN和DIRIN指令进行设置,并用EEPSAV指令进行保存。 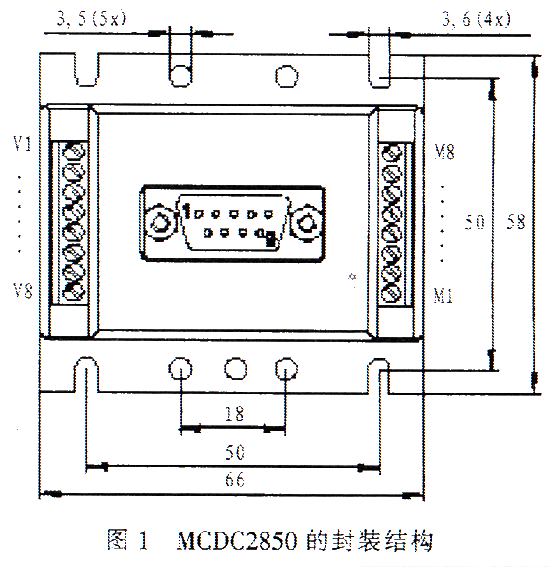 2 MCDC 2805的二种控制模式 MCDC 2805可以用模拟方式或数字方式输入给定速度。 2.1 模拟速度控制模式 这种工作模式通过模拟输入端(V5)输入给定速度的电压信号,无需使用RS-232串口,但可以通过它来改变系统设置。通过电位计输入给定速度信号是比较简单的速度控制方式,如图2所示,模拟地(V3)与电源地(V7)不共地,RS-232串口可以使用。但是,由于信号输入部分采用差分放大输入方式,因此,若信号输入端(V5)处于悬空状态,将会产生约2V的电压,所以必须将输入端用小阻值电阻器跨接到模拟输入地端,或置于与模拟输入地(V3)相同的电平上。 由于TXD端电压变化,精度不是非常精确。因此,通常使用RS-232串口进行数字方式输入,可以得到更为精确的控制模式。 2.2 通过RS-232串口的数字方式输入 RS-232串口由TXD、RXD及电源地构成,可以用交叉的RS-232串口电缆将MCDC 2805型运动控制器与PC、SPS及IPC等设备连接。RS-232串口的功能包括设置系统及电机参数、在线数据分析、电机动转时的实时通讯。通过简易的ASCII码终端仿真程序来控制,在设置中,参数可以保存到EEPROM中,MCDC 2805型运动控制器加电后,即运行保存在EEPROM中的设置程序。(注:必须用“EEPSAV”指令保存到EEPROM中) 2.3 ASCII指令 通过一系列ASCII指令,可以方便的控制电机,而且即使在程序运行时,也能通过RS-232串口输入指令。
2 MCDC 2805的二种控制模式 MCDC 2805可以用模拟方式或数字方式输入给定速度。 2.1 模拟速度控制模式 这种工作模式通过模拟输入端(V5)输入给定速度的电压信号,无需使用RS-232串口,但可以通过它来改变系统设置。通过电位计输入给定速度信号是比较简单的速度控制方式,如图2所示,模拟地(V3)与电源地(V7)不共地,RS-232串口可以使用。但是,由于信号输入部分采用差分放大输入方式,因此,若信号输入端(V5)处于悬空状态,将会产生约2V的电压,所以必须将输入端用小阻值电阻器跨接到模拟输入地端,或置于与模拟输入地(V3)相同的电平上。 由于TXD端电压变化,精度不是非常精确。因此,通常使用RS-232串口进行数字方式输入,可以得到更为精确的控制模式。 2.2 通过RS-232串口的数字方式输入 RS-232串口由TXD、RXD及电源地构成,可以用交叉的RS-232串口电缆将MCDC 2805型运动控制器与PC、SPS及IPC等设备连接。RS-232串口的功能包括设置系统及电机参数、在线数据分析、电机动转时的实时通讯。通过简易的ASCII码终端仿真程序来控制,在设置中,参数可以保存到EEPROM中,MCDC 2805型运动控制器加电后,即运行保存在EEPROM中的设置程序。(注:必须用“EEPSAV”指令保存到EEPROM中) 2.3 ASCII指令 通过一系列ASCII指令,可以方便的控制电机,而且即使在程序运行时,也能通过RS-232串口输入指令。  3 应用举例 目的:(1)通电后电机运行到限位开关位置;(2)数字信号输入端(故障输出端已重新编程)脉冲上升沿使电机正转5转(如果逻辑电平为低电平,电机将停止);(3)如果逻辑电平仍为高电平,电机在旋转3转后将运行到0位置。 设置: SOR0 ——切换到通过RS-232口输入的速度控制工作模式 ENCRES2048 ——将编码器分辨率设置成512 LR0 ——无运动 M ——切换到位置控制工作模式 REFIN ——将故障输出端设置成输入端 HA1 HL1 HN1 ——模拟输入端为限位开关 CAHOSEQ ——保存复位程序 POHOSEQ1 ——激活通电复位程序 HOSP-200 ——设置复位速度(后退) HP1 ——限位开关上升沿有效 ENPROG ——通电激活程序 ANSW0 ——关闭异步响应功能 EEPSAV ——将设置保存到EEPROM 程序: A1 HP3 ——第二输入端(故障输出端)高电平有效 A2 JPF2 ——在第二输入端变低电平前执行连续循环 HP1 ——第二输入端(故障输出端)低电平有效 A3 JPF3 ——在第二输入端变高电平前执行连续循环一判断正边界 LR10240 NP M ——向前转5转 DELAY50 ——延时0.5秒后判断第二输入端 JPF1 ——第二输入端为低电平时返回到程序起始位 LA0 NP0 M ——第二输入端为高电平时运行到0位 JMP1 ——返回到程序起始位 备注:①编程工作完成后RS-232串口并非必要;②在数字输入端输入短脉冲信号将触发程序,而长脉冲将中断程序。 4 结束语 MCDC 2805型运行控制器的安装方便、集成度高、体积小巧、功能强大且拥有多种控制模式,应用范围极其广泛。使用Faulhober集团提供的多功能扩展板,仅仅通过一个RS-232串口就可以控制多个电机运行。
3 应用举例 目的:(1)通电后电机运行到限位开关位置;(2)数字信号输入端(故障输出端已重新编程)脉冲上升沿使电机正转5转(如果逻辑电平为低电平,电机将停止);(3)如果逻辑电平仍为高电平,电机在旋转3转后将运行到0位置。 设置: SOR0 ——切换到通过RS-232口输入的速度控制工作模式 ENCRES2048 ——将编码器分辨率设置成512 LR0 ——无运动 M ——切换到位置控制工作模式 REFIN ——将故障输出端设置成输入端 HA1 HL1 HN1 ——模拟输入端为限位开关 CAHOSEQ ——保存复位程序 POHOSEQ1 ——激活通电复位程序 HOSP-200 ——设置复位速度(后退) HP1 ——限位开关上升沿有效 ENPROG ——通电激活程序 ANSW0 ——关闭异步响应功能 EEPSAV ——将设置保存到EEPROM 程序: A1 HP3 ——第二输入端(故障输出端)高电平有效 A2 JPF2 ——在第二输入端变低电平前执行连续循环 HP1 ——第二输入端(故障输出端)低电平有效 A3 JPF3 ——在第二输入端变高电平前执行连续循环一判断正边界 LR10240 NP M ——向前转5转 DELAY50 ——延时0.5秒后判断第二输入端 JPF1 ——第二输入端为低电平时返回到程序起始位 LA0 NP0 M ——第二输入端为高电平时运行到0位 JMP1 ——返回到程序起始位 备注:①编程工作完成后RS-232串口并非必要;②在数字输入端输入短脉冲信号将触发程序,而长脉冲将中断程序。 4 结束语 MCDC 2805型运行控制器的安装方便、集成度高、体积小巧、功能强大且拥有多种控制模式,应用范围极其广泛。使用Faulhober集团提供的多功能扩展板,仅仅通过一个RS-232串口就可以控制多个电机运行。
编辑:冀凯 引用地址:MCDC 2805型直流电机运动控制器的原理及应用
2 MCDC 2805的二种控制模式 MCDC 2805可以用模拟方式或数字方式输入给定速度。 2.1 模拟速度控制模式 这种工作模式通过模拟输入端(V5)输入给定速度的电压信号,无需使用RS-232串口,但可以通过它来改变系统设置。通过电位计输入给定速度信号是比较简单的速度控制方式,如图2所示,模拟地(V3)与电源地(V7)不共地,RS-232串口可以使用。但是,由于信号输入部分采用差分放大输入方式,因此,若信号输入端(V5)处于悬空状态,将会产生约2V的电压,所以必须将输入端用小阻值电阻器跨接到模拟输入地端,或置于与模拟输入地(V3)相同的电平上。 由于TXD端电压变化,精度不是非常精确。因此,通常使用RS-232串口进行数字方式输入,可以得到更为精确的控制模式。 2.2 通过RS-232串口的数字方式输入 RS-232串口由TXD、RXD及电源地构成,可以用交叉的RS-232串口电缆将MCDC 2805型运动控制器与PC、SPS及IPC等设备连接。RS-232串口的功能包括设置系统及电机参数、在线数据分析、电机动转时的实时通讯。通过简易的ASCII码终端仿真程序来控制,在设置中,参数可以保存到EEPROM中,MCDC 2805型运动控制器加电后,即运行保存在EEPROM中的设置程序。(注:必须用“EEPSAV”指令保存到EEPROM中) 2.3 ASCII指令 通过一系列ASCII指令,可以方便的控制电机,而且即使在程序运行时,也能通过RS-232串口输入指令。 3 应用举例 目的:(1)通电后电机运行到限位开关位置;(2)数字信号输入端(故障输出端已重新编程)脉冲上升沿使电机正转5转(如果逻辑电平为低电平,电机将停止);(3)如果逻辑电平仍为高电平,电机在旋转3转后将运行到0位置。 设置: SOR0 ——切换到通过RS-232口输入的速度控制工作模式 ENCRES2048 ——将编码器分辨率设置成512 LR0 ——无运动 M ——切换到位置控制工作模式 REFIN ——将故障输出端设置成输入端 HA1 HL1 HN1 ——模拟输入端为限位开关 CAHOSEQ ——保存复位程序 POHOSEQ1 ——激活通电复位程序 HOSP-200 ——设置复位速度(后退) HP1 ——限位开关上升沿有效 ENPROG ——通电激活程序 ANSW0 ——关闭异步响应功能 EEPSAV ——将设置保存到EEPROM 程序: A1 HP3 ——第二输入端(故障输出端)高电平有效 A2 JPF2 ——在第二输入端变低电平前执行连续循环 HP1 ——第二输入端(故障输出端)低电平有效 A3 JPF3 ——在第二输入端变高电平前执行连续循环一判断正边界 LR10240 NP M ——向前转5转 DELAY50 ——延时0.5秒后判断第二输入端 JPF1 ——第二输入端为低电平时返回到程序起始位 LA0 NP0 M ——第二输入端为高电平时运行到0位 JMP1 ——返回到程序起始位 备注:①编程工作完成后RS-232串口并非必要;②在数字输入端输入短脉冲信号将触发程序,而长脉冲将中断程序。 4 结束语 MCDC 2805型运行控制器的安装方便、集成度高、体积小巧、功能强大且拥有多种控制模式,应用范围极其广泛。使用Faulhober集团提供的多功能扩展板,仅仅通过一个RS-232串口就可以控制多个电机运行。
上一篇:抗电磁干扰的PWM风扇控制器
下一篇:电源监控器IMP809/810及其应用
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 LT1011ACJG
LT1011ACJG
小广播
热门活动
换一批
更多


Vishay线上图书馆
- 选型-汽车级表面贴装和通孔超快整流器
- 你知道吗?DC-LINK电容在高湿条件下具有高度稳定性
- microBUCK和microBRICK直流/直流稳压器解决方案
- SOP-4小型封装光伏MOSFET驱动器VOMDA1271
- 使用薄膜、大功率、背接触式电阻的优势
- SQJQ140E车规级N沟道40V MOSFET

最新电源管理文章
更多精选电路图






更多热门文章
更多每日新闻
- 宁德时代巧克力换电生态大会将举行,什么是“巧克力换电”?1.5分钟换电能实现吗?
- 新型生物材料与高端医疗器械广东研究院、远诺技术转移中心加入面向初创企业的 MathWorks
- S5PV210 Linux字符驱动之PWM蜂鸣器驱动
- 尼得科机床新增可实现高效加工的高速主轴产品线
- Gartner发布2025年影响基础设施和运营的重要趋势
- 智谱清言英特尔酷睿Ultra专享版发布,离线模型玩转AIPC
- Bourns推出全新高效能、超紧凑型气体放电管 (GDT) 浪涌保护解决方案
- S5PV210之UBOOT-2011.06启动过程解析
- 六个理由告诉您为什么应该将模拟无线麦克风更换为数字无线麦克风
- S5PV210启动过程分析
更多往期活动
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号