随着现代工业的发展,越来越多的工业系统、社会和经济系统己不再局限于单变量系统,而是结构复杂,模型不确定的多变量系统。传统控制方法虽然在很大程度上能满足工业系统的控制要求,但对一些具有强耦合性、不确定性、非线性、信息不完全性和大滞后性等特征的工业控制系统,传统控制方法对其无法得到满意的控制效果所以多变量系统控制的研究越来越受到重视。而要对多变量系统进行控制,尤其是实施一些先进控制算法,如预测控制、内模控制等都是基于模型的,所以系统的模型是实施多变量控制的前提条件。
1 模型辨识方法

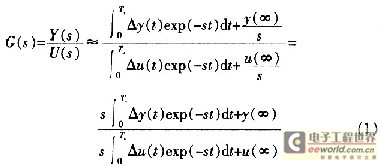
图1是一个典型的二变量控制系统框图。从图1看出,模型的辨识就是辨识出G11(s)、G21(s)、G12(s)、G22(s)这4个传递函数。这里采用基于频域的阶跃响应方法进行辨识。对于PID控制系统,其控制器输出u和过程输出y之间的传递函数G(s)表示为:
将其离散化后用jω代替s变为

对于过程频率响应,取ωi的范围为[-π,0]能够充分体现系统频率特性,为了获得更精确结果,把π分成M个区间。计算ωi值
![]()
其对应的相位角
![]()
由于控制过程中大部分系统可以用二阶加滞后模型代替,所以设模型传递函数为
从而得出传递函数模型参数。
对于图1中的典型系统,当系统稳定后,断开u1、u2,给u2加入阶跃信号,记录下y1、y2的值,然后代入式(2)~式(12)辨识出G11(s),G21(s)。同理,u2加入阶跃信号,令u1=O,辨识出G12(s),G22(s),从而系统的传递函数矩阵求出

2 滞后环节近似
由于得出的模型含有滞后环节,而滞后环节不能够直接解耦,所以比较各种近似方法,通常近似方法为:一阶pade近似、二阶对称pade近似、二阶非对称Pade近似。文献对其多次进行实验发现一阶Pade逼近在初始时刻有波动,但在滞后较大的情况下逼近效果较好,这是因为Pade逼近引入零点的原因,二阶对称Pade逼近效果最差,而且二阶对称Pade逼近除了在初始时刻有波动还产生了超调量。二阶非对称Pade逼近调节时间较短,且无明显的超调量,但是波动较大。因此采用移位处理和二阶泰勒级数展开即全极点近似法

通过仿真验证发现全极点型近似方法由于避免引入零点,所以误差最小,其要比Pade逼近调节时间短,而且没有超调量,即能更好的获得阶跃响应特性。
3 解耦控制
多输入多输出系统内部结构复杂,存在有一定程度的耦合作用,对于这种存在耦合的对象,工业过程控制要求系统能够安全稳定地运行,又有较好的调节性能,能以较小的误差跟踪设定值的变化,并使稳态误差为零。为了达到高质量的控制性能,必须进行解耦设计。如何把它们间的耦合作用去掉变成独立的单变量系统进行控制是解决多变量控制的一种重要的方法,去掉耦合的过程就是解耦。其中常用的解耦方法有对角矩阵法、逆Nyquist曲线法和特征曲线法。其中对角矩阵法在过程控制领域中起到很大作用。

式(15)是一个多变量系统传递函数矩阵,对角矩阵解耦就是将耦合对象传递函数矩阵变成一个对角形矩阵的形式即式(16)所示,除主对角线上的元素外,其他元素均为零。这样输入U(s)与输出Y(s)就成为一一对应关系,以达到便于控制的目的。

假设为了使传递函数矩阵转变为对角阵,在U(s)的输出端加入一个n×n的矩阵D(s)
由于采用上文所提的方法辨识出的模型是奇异矩阵的几率很小,以二输入二输出系统为例,假设G(s)为一个非奇异方阵,则有逆矩阵存在。针对PID控制器的解耦控制系统框图如图2所示。

加入解耦控制器后系统转化为

对于式(20)可以利用单变量的控制方法对其进行控制。
4 解耦系统仿真
应用MATLAB软件对解耦控制进行仿真验证。假设传递函数矩阵为

首先采用全极点近似使其转化为线性系统,采用全极点近似后式(21)变为

以式(21)中G11,G22为例进行全极点近似,其仿真结果如图3所示。

从上面的仿真结果看出近似前后输出曲线基本一致,说明全极点近似方法能够很好体现原系统的性能。
为了求的解耦矩阵,对式(22)取逆并且与![]() 相乘求的D(s)
相乘求的D(s)

得到解耦矩阵后,通过仿真分析解耦后系统间的耦合程度,从输入端u1、u2分别加入阶跃信号后解耦前后系统输出曲线如图4所示。从图中可以看出,解耦后两个回路之间的耦合程度大大降低,有效减少了回路间的干扰,控制系统的性能得到大大提高。

5 结论
通过理论和仿真实验证明,采用频域辨识和对角矩阵解耦的控制方法取得很好效果,为系统能够长期稳定的运行提供保证。
上一篇:基于PT2262/PT2272的一对多双向信息传输的多功能控制系统
下一篇:Agent技术在装备维修人员保障决策模型中的应用
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 8601401IA
8601401IA










 京公网安备 11010802033920号
京公网安备 11010802033920号