近几年来,随着电力电子技术的飞速发展,永磁无刷直流电机的本体及其相关控制技术得到迅猛的发展。永磁无刷直流电机有着噪音低、效率高、控制简单、功率密度高等诸多优点,因此在交通、航空、航天、军工、伺服控制以及家电领域得到广泛应用。
对方波型无刷直流电机的控制方式主要有H_PWM_L_0N调制方式、H_ON_L_PWM调制方式、H-PWMLPWM调制方式等。
本文介绍如何用80C196MH来实现H_WM_L_0N调制方式,并在上管进行PWM调制时,对应下管进行互补PWM调制,改进了电机减速停机性能,从而更好地对电机转速进行控制。Intel80C196MH是专门为电机高速控制所设计,它是由CHMOS电路构成,功耗低,并具有省电的工作方式,所以也适合集成于各种电路中长期使用,可靠性极高。
l 系统组成
典型的永磁无刷直流电机控制系统如图1所示。它由电机本体、逆变器、位置传感器、控制器组成。?
在本文中,变频器采用了富十公司R系列IPM模块。IPM模块内含驱动电路和保护电路。控制芯片80C196MH发出的6路PWM控制信号经过光耦TIP52l与驱动电路隔离。lPM保护信号经光耦连至80C196MH的EXTINT功率驱动保护中断引脚,该引脚检测到低电平后,80C196MH控制器立刻将所有WG输出脚(PWM)设置为高电平,关断所有的IGBT。
对于方波型无刷直流电机,一般采用120°控制方式。脉宽120°的电机和传统正弦波电机相比,具有整流电压脉动小,转矩脉动小的优点。
2 调制方式
本文所采取的PWM调制方式基本属于H_PWM_L_ON调制方式,即上桥臂PWM调制,下桥臂恒通;为了适应电机制动过程的需要,在该PWM调制策略的基础之上,加了互补调制策略,即当上桥臂开关管进行PWM凋制时,则对应同一桥臂的下桥臂开关管处于与七桥臂开关管互补调制的状态。这意味着,当上桥臂开关管开通时,下桥臂开关管处于关断状态,而当上桥臂开关管关断时,下桥臂开关管处于开通状态。触发脉冲分配的原理如图2所示(低电平有效,T表示节拍)。?
采用这种调制方式,电机在减速和制动过程中有一定的优势,下面以减速过程为例来进行分析。在急剧减速阶段,因为随着触发脉冲宽度的减小,输出电压平均值立即下降,但是,由于系统的机械惯性大于电磁惯性,在电源输出电压下降瞬间,转速并未下降,因此,造成电机绕组反电动势电压高于电源电压,从而使电机处于再生发电状态,能量回馈到直流电源,所产生的电磁转矩作为制动转矩使转速下降。随着转速下降,电枢反电动势也下降,再生发电状态消失。
设以电流从A相流到C相为例分析。A相上桥臂调制(S1),C相下桥臂恒通(S2),同时,S4和S1处于互补调制状态,如图3(a)所示。因为电机处于急剧减速状态,所以电源输出到电机的平均电压UAC要低于电机绕组反电动势平均值eAC表示A、C两相绕组端子之间的反电动势,可以看作一个电压源),如图3(b)所示。在一个开关周期内的DoT阶段(Do=1一D,D为占空比,T为开关周期),开关管S1关断,S4开通,由于绕组呈现感性,相电流方向iA不变,此时电流通过S2、D4续流。到该电流衰减到零时,由于平均反电动势eAC高于平均直流电压UAC,对于直流电源来说,电机相当于一个直流电压源,则在反电动势作用下,相电流iA反向,因为此时S4处于开通状态,所以该再生电流通过S4和D2被引入电机绕组,而直流母线电流为零。该再生电流对此时处于正转的电机来说,为制动转矩。在DT阶段,S1开通,S4关断;因为S4关断导致再生电流立即改变流通途径,通过D1、D2反向流过直流母线开始衰减,此时S1,开通但没有电流流过。当该电流衰减至零时,S1、S2中开始流过电流并逐渐上升,一直持续到S1关断为止。
?
从以上分析过程看出,这种互补调制方式将改变减速过程中绕组电流的流向,使电机绕组产生较大的制动力矩,有利于更快地减速,此时直流电流变为负值,对直流端电容充电。本系统采用不控整流所得到的直流电压为电机供电,因此无法将能量回馈到电网,需要一个途径将反馈到直流侧的能量释放。为此在电路中并联了一个由开关器件控制导通的功率电阻,当直流侧的电压达到一定的值时,部分能量就通过电阻以热能的形式消耗掉。电阻发热释放能量的方式是一种迫不得已的手段。这种方法适用于不经常制动和减速的情况,如果电机需频繁制动和减速,可以考虑使用能量可回馈的变流电路。
3 调制方式的软件实现
80C196MH内部自带EPA和WC功能模块。WG波形发生器需要用到如下几个寄存器:WG_COUNT(加/减时基寄存器)、G_RELOAD(重装载寄存器,决定PWM的载波频率)、WG_COM_Px(相比较寄存器,决定PWM的占空比)、WG_CON(WG控制寄存器)和WG_OUT(输出控制缓冲寄存器)。其中WG_CON设置WC的方式(如占空比的装载方式),WG_OUT用来选择6个输出引脚上的输出信号(高电平、低电平或PWM)。
当PWM的占空比最大(100%)时,其输出电压平均值最大,占空比最小(0%)时,其输出的电压为O。因此,AMP数据与占空比是成正比的。在程序中,占空比的值存储在寄存器AMPLUDE中。占空比(AMPLITUDE)_WG_OMP/WG_RELOAD,考虑到表格数据以及规格化(100%_0FFFFH),故有:
?![]()
式中:WG_COMP为装入相比较寄存器的值;
AMP为由查表得到的电流幅值;
WG_RELOAD为载波周期(本系统采用边缘对准PWM方式3)。
AMP×WG_RELOAD得到32位的乘积,只取其高位字,就实现了除以216的操作。
利用80C196MH的EPA和WG功能模块,根据换相顺序确定输出6路PWM信号和电平信号。增加了互补策略的H_PWM_L_ON调制方式的波形输出时序如表1所列。
?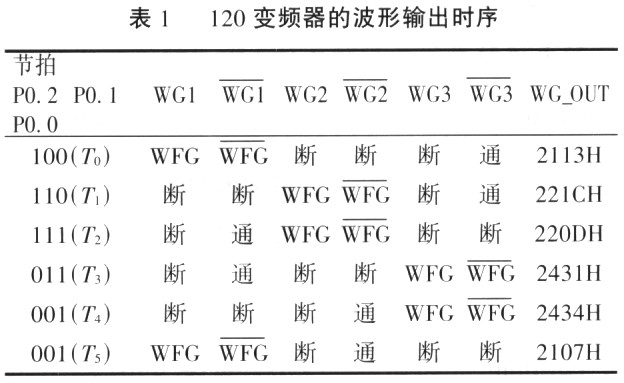
表中:WG1和WG1(P6.0和P6.1)表示相1信号;
WG2和WG2(P6.2和P6.3)表示相2信号;
WG3和WG3(P6.4和P6.5)表示相3信号;
WFG表示引脚上出现PWM波形。
PO 2、PO.1、PO.O用来表示位置信号在程序节拍号由电机传送给单片机的位置信号来表示。在本系统中,位置信号传给单片机的PO.2、PO.l、PO.O。根据位置信号的改变来改变WG_OUT寄存器的输出,从而进行换相。
根据前面给出的波形输出时序,图4给出了换相子程序的流程图。在本系统中,占空比的设置在波形发生器中断服务程序中完成的,因此,在这里只需要设置WG_OUT来改变波形发生器的输出值。

4 实验结论
根据以上的控制策略,制作了一台永磁直流无刷电机的样机,并将它应用于工业缝纫机。图5是实验过程中得到的母线电流波形。如图5中所示,在电机正常工作时,母线上会产生负电流,这是由下管的换向引起的。在实际应用中,可以采用换向延迟的方法来改善正常工作时母线电流的波形。

?
图6是停机过程母线电流波形,在电机停机过程中,由于电机处于再生制动状态,直流母线的平均电流为负值,电机作发电机运行,获得了较大的制动力矩,从而使电机能够快速地停机。
上一篇:单片机与TA8435的步进电机细分控制
下一篇:基于LIN总线的车用无刷直流电机控制器设计
推荐阅读最新更新时间:2024-03-30 21:22

 高频电路设计与制作 (市川裕一,青木胜,卓圣鹏 著)
高频电路设计与制作 (市川裕一,青木胜,卓圣鹏 著) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用





- CGD和Qorvo将共同革新电机控制解决方案
- 是德科技 FieldFox 手持式分析仪配合 VDI 扩频模块,实现毫米波分析功能
- 贸泽开售可精确测量CO2水平的 英飞凌PASCO2V15 XENSIV PAS CO2 5V传感器
- 玩法进阶,浩亭让您的PCB板端连接达到新高度!
- 长城汽车研发新篇章:固态电池技术引领未来
- 纳芯微提供全场景GaN驱动IC解决方案
- 解读华为固态电池新专利,2030 叫板宁德时代?
- 让纯电/插混车抓狂?中企推全球首款-40℃可放电增混电池,不怕冷
- 智驾域控知多少:中低端车型加速上车,行泊一体方案占主体
- Foresight推出六款先进立体传感器套件 彻底改变工业和汽车3D感知




 京公网安备 11010802033920号
京公网安备 11010802033920号