摘要:MCDC 2805型运动控制器是专为Faulhaber集团生产的直流微电机量身定作的。它由功能强大的16位微处理器和性能卓越的数字滤波器组成。文中介绍MCDC 2805的硬件结构、外型封装、RS-232串口的功能及RS-232串口的ASCII指令及其应用。
关键词:RS-232 运动控制器 电机编码分辨率 直流电机
MCDC 2805型运动控制器是专为Faulhober集团生产的直流微电机量身定作的。它由功能强大的16位微处理器和性能卓越的数字滤波器组成。主要功能包括速度控制、速度模式斜波、三角形、梯形等复杂复合运动运行模式及位置控制、附加控制模式等。所有滤波器参数均能通过RS-232串口设置,并保存在运行控制器内的EEPROM中,因此,MCDC 2805能根据实际需要完全独立工作。
1 MCDC 2805引脚功能及内部结构
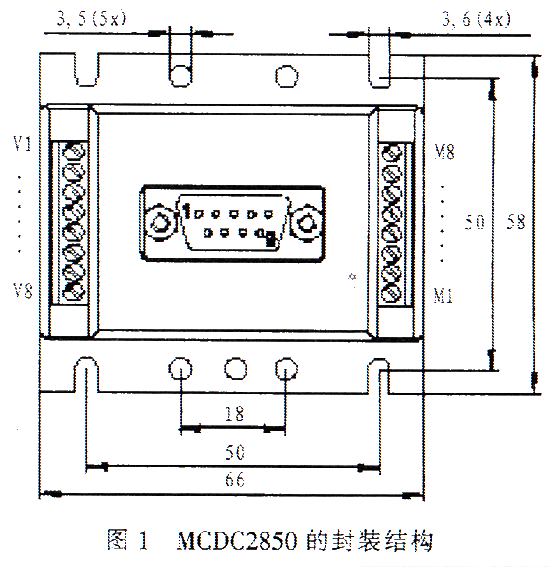
MCDC 2805的封装结构如图1所示。其中,左侧V1为RS-232 TXD(RS-232发送端);V2为RS-232RXD(RS-232接收端);V3为AnalogGND(模拟地);V4为FaultOutput(故障输出端);V5为AnalogInput(模拟输入端);V6为+24V(电源正极);V7为GND(地);V8为Input3(第三输入端)。中间是9针D型串口,其中2号是RS-232 RXD(RS-232接收端);3号是RS-232 TXD(RS-232发送端);5号是GND(地)。右侧M1为Input#5(第五输入端);M2为Input #4(第四输入端);M3为Channel A(编码器A通道);M4为Channel B(编码器B通道);M5为VCC(+5V)(系统提供+5V);M6为SignalGND(信号地);M7为Motor+(接电机正极);M8为Motor-(接电机负载)。其中,故障输出端V4也可通过设置来实现下述功能:数字信号输出端;限位开关输入端;转向控制输入端。而且,当V4设置成输入状态时,在输入信号连接到此端口前,使用REFIN和DIRIN指令进行设置,并用EEPSAV指令进行保存。
 2 MCDC 2805的二种控制模式
MCDC 2805可以用模拟方式或数字方式输入给定速度。
2.1 模拟速度控制模式
这种工作模式通过模拟输入端(V5)输入给定速度的电压信号,无需使用RS-232串口,但可以通过它来改变系统设置。通过电位计输入给定速度信号是比较简单的速度控制方式,如图2所示,模拟地(V3)与电源地(V7)不共地,RS-232串口可以使用。但是,由于信号输入部分采用差分放大输入方式,因此,若信号输入端(V5)处于悬空状态,将会产生约2V的电压,所以必须将输入端用小阻值电阻器跨接到模拟输入地端,或置于与模拟输入地(V3)相同的电平上。
由于TXD端电压变化,精度不是非常精确。因此,通常使用RS-232串口进行数字方式输入,可以得到更为精确的控制模式。
2.2 通过RS-232串口的数字方式输入
RS-232串口由TXD、RXD及电源地构成,可以用交叉的RS-232串口电缆将MCDC 2805型运动控制器与PC、SPS及IPC等设备连接。RS-232串口的功能包括设置系统及电机参数、在线数据分析、电机动转时的实时通讯。通过简易的ASCII码终端仿真程序来控制,在设置中,参数可以保存到EEPROM中,MCDC 2805型运动控制器加电后,即运行保存在EEPROM中的设置程序。(注:必须用“EEPSAV”指令保存到EEPROM中)
2.3 ASCII指令
通过一系列ASCII指令,可以方便的控制电机,而且即使在程序运行时,也能通过RS-232串口输入指令。
2 MCDC 2805的二种控制模式
MCDC 2805可以用模拟方式或数字方式输入给定速度。
2.1 模拟速度控制模式
这种工作模式通过模拟输入端(V5)输入给定速度的电压信号,无需使用RS-232串口,但可以通过它来改变系统设置。通过电位计输入给定速度信号是比较简单的速度控制方式,如图2所示,模拟地(V3)与电源地(V7)不共地,RS-232串口可以使用。但是,由于信号输入部分采用差分放大输入方式,因此,若信号输入端(V5)处于悬空状态,将会产生约2V的电压,所以必须将输入端用小阻值电阻器跨接到模拟输入地端,或置于与模拟输入地(V3)相同的电平上。
由于TXD端电压变化,精度不是非常精确。因此,通常使用RS-232串口进行数字方式输入,可以得到更为精确的控制模式。
2.2 通过RS-232串口的数字方式输入
RS-232串口由TXD、RXD及电源地构成,可以用交叉的RS-232串口电缆将MCDC 2805型运动控制器与PC、SPS及IPC等设备连接。RS-232串口的功能包括设置系统及电机参数、在线数据分析、电机动转时的实时通讯。通过简易的ASCII码终端仿真程序来控制,在设置中,参数可以保存到EEPROM中,MCDC 2805型运动控制器加电后,即运行保存在EEPROM中的设置程序。(注:必须用“EEPSAV”指令保存到EEPROM中)
2.3 ASCII指令
通过一系列ASCII指令,可以方便的控制电机,而且即使在程序运行时,也能通过RS-232串口输入指令。
 3 应用举例
目的:(1)通电后电机运行到限位开关位置;(2)数字信号输入端(故障输出端已重新编程)脉冲上升沿使电机正转5转(如果逻辑电平为低电平,电机将停止);(3)如果逻辑电平仍为高电平,电机在旋转3转后将运行到0位置。
设置:
SOR0 ——切换到通过RS-232口输入的速度控制工作模式
ENCRES2048 ——将编码器分辨率设置成512
LR0 ——无运动
M ——切换到位置控制工作模式
REFIN ——将故障输出端设置成输入端
HA1 HL1 HN1 ——模拟输入端为限位开关
CAHOSEQ ——保存复位程序
POHOSEQ1 ——激活通电复位程序
HOSP-200 ——设置复位速度(后退)
HP1 ——限位开关上升沿有效
ENPROG ——通电激活程序
ANSW0 ——关闭异步响应功能
EEPSAV ——将设置保存到EEPROM
程序:
A1
HP3 ——第二输入端(故障输出端)高电平有效
A2
JPF2 ——在第二输入端变低电平前执行连续循环
HP1 ——第二输入端(故障输出端)低电平有效
A3
JPF3 ——在第二输入端变高电平前执行连续循环一判断正边界
LR10240
NP
M ——向前转5转
DELAY50 ——延时0.5秒后判断第二输入端
JPF1 ——第二输入端为低电平时返回到程序起始位
LA0
NP0
M ——第二输入端为高电平时运行到0位
JMP1 ——返回到程序起始位
备注:①编程工作完成后RS-232串口并非必要;②在数字输入端输入短脉冲信号将触发程序,而长脉冲将中断程序。
4 结束语
MCDC 2805型运行控制器的安装方便、集成度高、体积小巧、功能强大且拥有多种控制模式,应用范围极其广泛。使用Faulhober集团提供的多功能扩展板,仅仅通过一个RS-232串口就可以控制多个电机运行。
3 应用举例
目的:(1)通电后电机运行到限位开关位置;(2)数字信号输入端(故障输出端已重新编程)脉冲上升沿使电机正转5转(如果逻辑电平为低电平,电机将停止);(3)如果逻辑电平仍为高电平,电机在旋转3转后将运行到0位置。
设置:
SOR0 ——切换到通过RS-232口输入的速度控制工作模式
ENCRES2048 ——将编码器分辨率设置成512
LR0 ——无运动
M ——切换到位置控制工作模式
REFIN ——将故障输出端设置成输入端
HA1 HL1 HN1 ——模拟输入端为限位开关
CAHOSEQ ——保存复位程序
POHOSEQ1 ——激活通电复位程序
HOSP-200 ——设置复位速度(后退)
HP1 ——限位开关上升沿有效
ENPROG ——通电激活程序
ANSW0 ——关闭异步响应功能
EEPSAV ——将设置保存到EEPROM
程序:
A1
HP3 ——第二输入端(故障输出端)高电平有效
A2
JPF2 ——在第二输入端变低电平前执行连续循环
HP1 ——第二输入端(故障输出端)低电平有效
A3
JPF3 ——在第二输入端变高电平前执行连续循环一判断正边界
LR10240
NP
M ——向前转5转
DELAY50 ——延时0.5秒后判断第二输入端
JPF1 ——第二输入端为低电平时返回到程序起始位
LA0
NP0
M ——第二输入端为高电平时运行到0位
JMP1 ——返回到程序起始位
备注:①编程工作完成后RS-232串口并非必要;②在数字输入端输入短脉冲信号将触发程序,而长脉冲将中断程序。
4 结束语
MCDC 2805型运行控制器的安装方便、集成度高、体积小巧、功能强大且拥有多种控制模式,应用范围极其广泛。使用Faulhober集团提供的多功能扩展板,仅仅通过一个RS-232串口就可以控制多个电机运行。
引用地址:MCDC 2805型直流电机运动控制器的原理及应用
2 MCDC 2805的二种控制模式
MCDC 2805可以用模拟方式或数字方式输入给定速度。
2.1 模拟速度控制模式
这种工作模式通过模拟输入端(V5)输入给定速度的电压信号,无需使用RS-232串口,但可以通过它来改变系统设置。通过电位计输入给定速度信号是比较简单的速度控制方式,如图2所示,模拟地(V3)与电源地(V7)不共地,RS-232串口可以使用。但是,由于信号输入部分采用差分放大输入方式,因此,若信号输入端(V5)处于悬空状态,将会产生约2V的电压,所以必须将输入端用小阻值电阻器跨接到模拟输入地端,或置于与模拟输入地(V3)相同的电平上。
由于TXD端电压变化,精度不是非常精确。因此,通常使用RS-232串口进行数字方式输入,可以得到更为精确的控制模式。
2.2 通过RS-232串口的数字方式输入
RS-232串口由TXD、RXD及电源地构成,可以用交叉的RS-232串口电缆将MCDC 2805型运动控制器与PC、SPS及IPC等设备连接。RS-232串口的功能包括设置系统及电机参数、在线数据分析、电机动转时的实时通讯。通过简易的ASCII码终端仿真程序来控制,在设置中,参数可以保存到EEPROM中,MCDC 2805型运动控制器加电后,即运行保存在EEPROM中的设置程序。(注:必须用“EEPSAV”指令保存到EEPROM中)
2.3 ASCII指令
通过一系列ASCII指令,可以方便的控制电机,而且即使在程序运行时,也能通过RS-232串口输入指令。
3 应用举例
目的:(1)通电后电机运行到限位开关位置;(2)数字信号输入端(故障输出端已重新编程)脉冲上升沿使电机正转5转(如果逻辑电平为低电平,电机将停止);(3)如果逻辑电平仍为高电平,电机在旋转3转后将运行到0位置。
设置:
SOR0 ——切换到通过RS-232口输入的速度控制工作模式
ENCRES2048 ——将编码器分辨率设置成512
LR0 ——无运动
M ——切换到位置控制工作模式
REFIN ——将故障输出端设置成输入端
HA1 HL1 HN1 ——模拟输入端为限位开关
CAHOSEQ ——保存复位程序
POHOSEQ1 ——激活通电复位程序
HOSP-200 ——设置复位速度(后退)
HP1 ——限位开关上升沿有效
ENPROG ——通电激活程序
ANSW0 ——关闭异步响应功能
EEPSAV ——将设置保存到EEPROM
程序:
A1
HP3 ——第二输入端(故障输出端)高电平有效
A2
JPF2 ——在第二输入端变低电平前执行连续循环
HP1 ——第二输入端(故障输出端)低电平有效
A3
JPF3 ——在第二输入端变高电平前执行连续循环一判断正边界
LR10240
NP
M ——向前转5转
DELAY50 ——延时0.5秒后判断第二输入端
JPF1 ——第二输入端为低电平时返回到程序起始位
LA0
NP0
M ——第二输入端为高电平时运行到0位
JMP1 ——返回到程序起始位
备注:①编程工作完成后RS-232串口并非必要;②在数字输入端输入短脉冲信号将触发程序,而长脉冲将中断程序。
4 结束语
MCDC 2805型运行控制器的安装方便、集成度高、体积小巧、功能强大且拥有多种控制模式,应用范围极其广泛。使用Faulhober集团提供的多功能扩展板,仅仅通过一个RS-232串口就可以控制多个电机运行。
上一篇:双口RAM通讯在电机控制中的应用
下一篇:新型永磁同步电机控制芯片IRMCK203及其应用
- 热门资源推荐
- 热门放大器推荐
 OPA344NA/250
OPA344NA/250
小广播
热门活动
换一批
更多

最新工业控制文章
更多精选电路图






更多热门文章
更多每日新闻
- Allegro MicroSystems 在 2024 年德国慕尼黑电子展上推出先进的磁性和电感式位置感测解决方案
- 左手车钥匙,右手活体检测雷达,UWB上车势在必行!
- 狂飙十年,国产CIS挤上牌桌
- 神盾短刀电池+雷神EM-i超级电混,吉利新能源甩出了两张“王炸”
- 浅谈功能安全之故障(fault),错误(error),失效(failure)
- 智能汽车2.0周期,这几大核心产业链迎来重大机会!
- 美日研发新型电池,宁德时代面临挑战?中国新能源电池产业如何应对?
- Rambus推出业界首款HBM 4控制器IP:背后有哪些技术细节?
- 村田推出高精度汽车用6轴惯性传感器
- 福特获得预充电报警专利 有助于节约成本和应对紧急情况
更多往期活动
11月17日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号