引言
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速和停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,以及步进电机只有周期性的误差而无累积误差等特点,使得在速度和位置等控制领域用步进电机来控制变得非常简单。
较常用的步进电机包括反应式步进电机、永磁式步进电机、混合式步进电机和单相式步进电机等。其中反应式步进电机的转子磁路由软磁材料制成,定字上有多相励磁绕组,利用磁导的变化产生转矩。
目前步进电机已广泛运用在需高定位精度、高分解能以及高响应性、信赖性等灵活控制性高的机械系统中,从生产过程中要求自动化、省人力、效率高的机器中,很容易发现步进电机的踪迹;尤其在重视速度和位置控制,需要精确操作各项指令动作的灵活控制性场合中,步进电机用的最多。但其步矩角较大,一般为1.5°-3°,并产生较大的跳动。尤其在低速情况下,系统的平稳性较差,往往满足不了某些高精密定位、精密加工等方面的要求,实现细分驱动是减小步距角,提高步进分辨率,增强电机运行平稳性的一种行之有效的方法。
1 步进电机细分驱动原理
步进电机细分驱动的工作原理是:在每次输入脉冲时,不是将绕组电流全部通入或切除,而是只改变相应绕组中额定的部分。电机转子的每步运动也只有步距角的一部分,这里绕组电流不是方波,而是阶梯波,电流分成多少个台阶,转子就以同样的个数转过一个步距角,这样将1个步距角细分成若干步的驱动方法称为"细分驱动"。
细分驱动的特点是:
在不改变电机结构参数的情况下,能使步距角减小;
能使步进电机运行平稳,提高匀速性,并能减弱或消除振荡。
可见,要实现细分,就需要将输入步进电机绕组的矩形电流波改变成阶梯性细分电流波,即设法使输入电机绕组的电流以若干个等幅、等宽度阶梯上升到额定值,并以同样的阶梯从额定值下降为零,如图1所示。
 |
本文采用新电元公司的步进电机驱动芯片MTD2009J实现上述细分控制系统。
2 MTD2009J特点
MTD2009J是日本新电元工业公司生产的一种双极性、定电流两相步进电机驱动IC。由于它把功放电路和控制电路都集成到一个芯片上,因此只需少许的外围元件,就能构成定电流驱动电路,并且该芯片还具有微步驱动功能,通过切换电流衰减速度可以实现低振动、低噪声的电机驱动。
2.1 特性
MTD2009J具有如下特性:
IC内部有双H桥;
IC内部有续流、回馈二极管;
与TTL、CMOS电平兼容,可直接接至CPU和门阵列等;
PWM定电流斩波功能;
内部电路具有噪声消除功能,无须外加滤波器;
具有电流衰减速度切换功能;
具有换向时防止上下桥臂直通功能;
可同时驱动两个两相步进电机。
2.2 MTD2009J细分方法及驱动波形
使用MTD2009J驱动两相步进电机可以明显地减少步进电机的振动和噪声,MTD2009J对每个相位都有一个独立的参考电压端。步进电机细分的控制是通过参考电压端电压的变化来实现的。图2为MTD2009J的相位变化、相位使能控制以及步进电机电流与参考电压之间变化的波形图。
 |
通过MTD2009J可对步进电机实现非常理想的控制效果,尤其MTD2009J可以实现同时对两个两相步进电机的控制,使它在监控产品以及对速度和位置控制需要精确操作的领域得到了广泛应用。
3 在智能一体化球型摄像机中的应用
智能一体化球型摄像机(简称快球)是集高清晰度彩色摄像机、万向变速云台、解码器、变焦镜头和防护罩等部件及功能于一体的监控产品,它最大限度地减少了系统部件的连接,提高了系统的可靠性;同时也便于安装和维护,具有外形美观,轻巧灵便,操作简单等优点。
智能一体化球型摄像机的一项重要技术指标是转速指标,它首先要求要有较宽的速度范围;其次,要求在恒速时要有较好的平稳性,尤其是在低速时,变速时要有较好的过渡性和较高的准确性;再者智能化一体化球型摄像机有预置点的功能,即设置预置点时的水平、垂直及镜头的位置在调用预置点时必须准确地定位。此智能化一体化球型摄像机的水平速度为0.05-250(°)/s,垂直速度为0.05-200(°)/s,多级变速,360度无限位旋转,180度自动翻转,每周细化为三百万步,运转平稳,抖动小,速度范围智能匹配摄像机焦距,人性化操作,手感优异。
对于以上技术指标,此快球采用了当今处于领先地位的Philips公司的32位ARM LPC21388作为中央处理器,MTD2009J作为水平和垂直步进电机的驱动芯片,步进电机采用了两相混合式步进电机,步距角为0.9°,采用TI公司的TLC5620数/模转换芯片作为MTD2009J每相参考电压的输入,它可将参考电压分为0-255份,为了提高快球的平稳性和准确性,对每一步进行了4096的细分,使此快球达到了极其优越的控制特性,参考电路如图3所示。
 |
由于步进电机按运行频率工作时,启动和停止各需要一个缓慢升频和降频的过程,因此启动时,可在启动频率之下启动步进电机,然后逐渐上升到运行频率;停止时,先将频率逐渐降低到启动频率以下才能停止,特别是负载转动惯性较大时,该现象很明显以致严重地影响到细分步进转角的非线性和均匀旋转的控制。另外由于步进电机的矩频特性不理想,电磁转矩随输入控制脉冲频率的升高而减小,在速度较高或加速度较大时,步进电机在脉冲转换时很容易引起失步,使得步进电机的动态性能变差,因此所控制的机械部件运动精度很低。为了克服以上缺点,本系统采用每个细分点对应于一个电流值。当细分数相当大时(例如本系统分成4096个点)电机绕组的电流信号就逼近模拟连续信号,这样可以极大地提高步进电机的分辨率和运行稳定性,为了缩短系统的运行时间,采用查表方式,即将每个细分点对应的电流值以表格的形式存储,运行时直接调用表格中的数据,从而提高了运行速度。
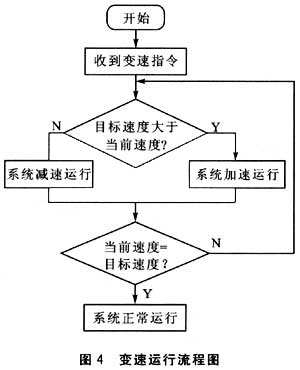
在运行控制方法采用了两级速度比较运行的方法。系统中存在两级速度:当前速度和目标速度。因为此系统是变速系统,在速度改变时要求系统必须平稳地过渡,此方法是:当系统收到变速指令时,首先将目标速度与当前速度相比较,并确定两速度之间的范围,以确定加速度的大小,若目标速度高于当前速度,则系统以较大的加速度加速运行,当接近目标速度时,系统减小加速度的值。逐渐靠近目标速度,直至相等,并以目标速度运行,直到再次收到变速指令。
图4为变速运行流程图。
 |
系统水平方向细分驱动运行函数如下: 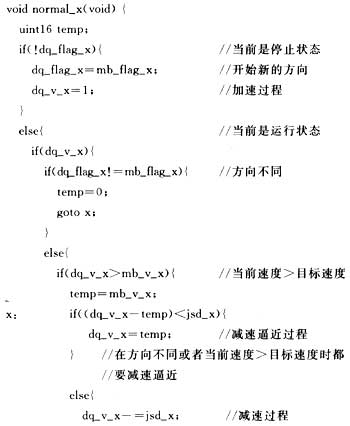

本系统在智能化一体化球型摄像机中取得了非常理想的效果。当摄像机镜头以220X变倍时,摄像机位置发生改变,图像没有任何抖动,预置点的调用也相当快速、准确,在整个安防行业获得了非常好的评价,并远销海外,取得了很好的经济效益和社会效益。
结语
本系统能满足大多数中小微型步进电机的可变细分控制、较高细分步距角精度及平滑运行等要求,具有体积小、细分精度高、运行功耗低、可靠性高以及可维护性强等特点。
系统软件功能丰富,通用性强,从而使控制系统更加灵活。
上一篇:智能卡的边频攻击分析及安全防范措施
下一篇:MAX125在电能质量监控系统中的应用
推荐阅读最新更新时间:2024-03-30 21:21

 高频电路设计与制作 (市川裕一,青木胜,卓圣鹏 著)
高频电路设计与制作 (市川裕一,青木胜,卓圣鹏 著) Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号