1 系统电路设计
1.1 系统方案
本驱动控制系统的电路框图如图1所示。
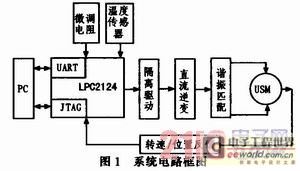
系统中LPC2124产生两路相位差为90°方波,两路方波经或非门后与原来的两路方波组成四路方波。四路方波经隔离驱动、直流逆变、谐振匹配后,就得到超声波电机工作所需的正弦交流信号。微调电阻主要用于电机调试时,调节输出PWM信号的频率,这可以缩短电机调试所消耗的时间。温度传感器用于检测电机所处的环境温度,这样,在对电机首次启动要求高的情况下,系统可以根据不同环境温度给电机提供不同的启动频率,有利于提高电机启动的稳定性。电机转子上的凹或凸齿对着霍尔传感器时,霍尔传感器输出的电流大小不一样。经过电路处理后,将电流变化转换成方波信号,利用方波信号实现电机转速、位置的检测。为了方便电路系统的调试和程序的下载,系统设置了JTAG和UART口。其中JTAG主要用于调试工作,当然也可以用于程序下载。而UART口则既可以将各种数据发送到电脑主机,又可用于程序的下载和Fl-ash的擦除。
1.2 控制芯片
超声波电机驱动控制系统的控制芯片是LPC2114,其内核为ARM7TDMI。LPC2124处理器是ARM通用32位微处理器家族的成员之一。LPC2124采用LQFP64封装,CPU操作电压1.8V,内部集成256 kB片内Flash程序存储区、16 kB静态RAM,拥有4路10位ADC、2个32位定时器、6路PWM输出、两个低功耗模式、46个GPIO及9个外部中断等。另外内置倍频锁相环(PLL),可实现最大为60 MHz的CPU操作率。同时LPC2124支持片上调试、断点,方便系统软、硬件的调试。
1.3 关键电路
1.3.1 隔离驱动、推挽、谐振匹配电路
隔离驱动、推挽、谐振匹配电路如图2所示。

LPC2124产生两路相位差为90°方波PWM—S和PWM—C,两路方波分别经74HC02D或非门后形成两路相应的反相方波,与原来的两路方波组成相位依次相差90°四路方波。四路方波经MAX4427隔离驱动放大后,利用4个MOS管(IRFR320)与两个中间抽头的变压器组成的推挽电路,将四路方波信号转换成两路相位差为90°的交流方波信号。由于超声波电机工作需要的是正弦交流信号,且超声波电机属容性负载,所以用串联电感的方式进行谐振匹配。[page]
1.3.2 温度采集模块
由于超声波电机的谐振频率除与电机结构密切相关外,与电机工作环境也很相关,而温度是其中非常重要的一个因素。因此本系统中加入了温度传感器,来检测环境温度,用于研究温度因素对电机启动的影响。温度传感器芯片选用了LM75芯片,其中SDA和SDL与LPC2124的SDA和SDL相连,且需接上拉电阻。LM75是I2C接口的温度传感器,测量温度范围为-55~125℃,LM75已经把当前温度转换为数字值,LPC2124可以直接读出使用。LM75上电后即可正常工作,无需发送命令去设置或初始化启动。电路系统中将LM75芯片的A0~A2引脚接地,所以其从机地址为0X90,在LPC212A采用主模式I2C的数据接收模式时,LM75从机被读的地址为0X91。LM75内部有4个寄存器,这4个寄存器是通过I2C扩展地址进行访问的,它们的扩展地址为0X00、0X01、0X02、0X03。温度值的寄存器地址为0X00,这是一个16位的只读寄存器,其温度值只使用了D15~D7位表示,低7位数据无效。在读温度寄存器时,连续读出两字节数据,而不用担心LM75内部自动增加子地址。其中D15位为0时表示正温度,为1时表示负温度。D14~D7为8位温度值,最低有效位等于0.5℃。所以当温度为正时,温度T=(D14-D7)/2;当温度为负时,需要对(D14~D7)取补码,所以温度T=(-(D14-D7)+1)/2。
1. 3. 3 转速、位置检测模块
转速和位置检测电路如图3所示。目前在超声波电机转速或位置方面的研究中,由于光电编码器精度高等原因,所以采用对多的方法就是利用光电编码器来检测转速或位置。但如果在震动剧烈等相对恶劣环境下,光电编码器一般就不可靠了,所以本文采用霍尔传感器ATS642 LSH结合安装在电机转子上的凹凸齿轮来检测转速或位置。ATS642LSH输出的是电流信号,其在电机每转过一个齿轮时,输出的电流发生变化,输出电流的典型值是高为14 mA,低为7 mA。利用一个100 Ω的电阻(图3中R12),将电流转换为电压信号。此时,高电平为1.4 V,低电平为0.7 V,与1 V的参考电压比较,即可将电压信号转换为方波信号。将该方波信号连接到LPC2124,控制器就可以利用方波信号的频率和个数,推算出电机的转速和位置状况。

2 PWM的控制
LPC2124的脉宽调制器建立在PWM专用的标准定时器之上,通过匹配寄存器及一些控制电路来实现PWM的输出。脉宽调制器共有7个匹配寄存器,可实现6路单边沿控制PWM输出或3路双边沿控制PWM输出,或两者的混合输出。
由于不能同时产生四路依次相差90°的PWM信号,所以只输出两路方波信号,经或非门反相产生另外两路信号。通过PWM240UT函数(如下)设置LPC2124的PWM相关控制寄存器后,P31、P33(PWM2、PWM4)输出两路方波信号。
利用LPC2124内置的10位逐次逼近式A/D转换器,调节微调电阻改变输入的电压值,来调节输出的PWM频率。由于是10位A/D,所以频率线性调节范围(f,f+1 023δ),其中f为输出的最低频率,δ为调频精度。f和δ根据电机情况设定相应的值。本课题中,电机谐振频率为33.67 kHz,设置的最低频率f为30 kHz,δ为10Hz,频率调节范围为30 000~40 230 Hz。
[page]
3 试验情况
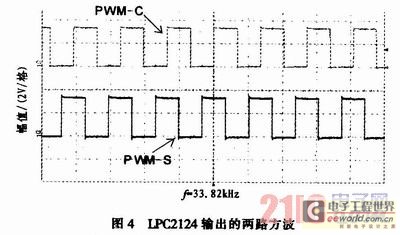
调节微调电阻,改变电机工作频率,使电机处于所需的运行状态,图4是LPC2124输出的PWM信号,频率为33.82kHz。
两路方波变四路后,经MOS驱动器MAX4427将方波电压幅值提升到10 V(供电电源为10 V),再经过1:4的抽头变压器后,将四路直流方波逆变成峰峰值为80 V的交流方波,如图5所示。由图5中可以看出,交流方波有明显的毛刺,且电压幅值明显不足以驱动电机,所以在接入属容性负载的电机之前,串联一个电感来实现滤波及谐振升压,谐振匹配后的正弦交流信号如图6所示。

霍尔传感器采集的转速、位置控制信号经电路处理后形成的方波信号如图7所示。试验用的电机转子上共有32个齿,从图7中可以看出,在500 ms内电机共转过了15个齿,所以电机的转速在56转每分左右。

4 结束语
利用LPC2124内置的脉宽调制器产生所需的PWM信号,替代传统的分离器件,有助于驱动电路的集成化、小型化。结合传统的推挽电路实现直流逆变和功率放大,驱动超声波电机工作。设置适当的最低频率f和调频精度δ,调节微调电阻,方便电机的调试工作。温度传感器LM75检测环境温度,LPC2124根据环境温度值计算并设置电机首次启动的初始频率,可有效消除电机启动时因温度因素带来的频率漂移,提高电机启动的可靠性和稳定性。
上一篇:设计基于LPC2000的次级启动加载程序用于代码升级
下一篇:基于LPC2214和uC/OS-II的音频处理方案及电路说明
推荐阅读最新更新时间:2024-03-16 13:06

 汽车维修基础训练丛书:教你认识汽车电子控制器
汽车维修基础训练丛书:教你认识汽车电子控制器 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题








- AMD推出第二代Versal Premium系列产品:首款PCIe 6.0和CXL 3.1的SoC FPGA
- 红帽宣布达成收购Neural Magic的最终协议
- 5G网速比4G快但感知差!邬贺铨:6G标准制定应重视用户需求
- SEMI报告:2024年第三季度全球硅晶圆出货量增长6%
- OpenAI呼吁建立“北美人工智能联盟” 好与中国竞争
- 传OpenAI即将推出新款智能体 能为用户自动执行任务
- 尼得科智动率先推出两轮车用电动离合器ECU
- ASML在2024 年投资者日会议上就市场机遇提供最新看法
- AMD将裁员4%,以在人工智能芯片领域争取更强的市场地位
- Arm:以高效计算平台为核心,内外协力共筑可持续未来




 京公网安备 11010802033920号
京公网安备 11010802033920号