智能车辆是一个集环境感知、规划决策、自动行驶等功能于一体的综合系统其集中应用了计算机、传感、信息、通讯、导航、人工智能及自动控制等技术是典型的高新技术综合体。本文设计的智能简易车辆系统就是此综合体的一种尝试。该系统使智能简易车辆在多种传感器的配合下实现了自动寻迹、平衡探测等功能,已基本实现了车辆的智能化。
1 智能简易车辆电路总体结构设计
文中简易智能车辆系统通过电动车跷跷板这一实验实现。采用AT89S52作为电动车跷跷板的控制核心,用红外传感器检测小车是否在制定轨道上运动,小车若偏离轨道,传感器便会发出一个信号送至单片机,使单片机控制步进电机的转动。同时通过角度传感器来识别小车是否到达平衡位置。
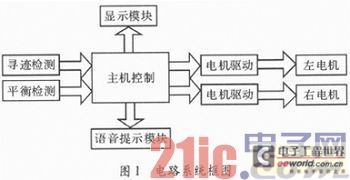
总体电路系统包括主机控制模块、平衡检测模块、寻轨检测模块、显示模块、电动驱动模块及语音提示模块6个部分。主机控制模块是该电路系统的核心,将平衡检测模块和寻迹模块检测到的信号进行运算处理,输出给电机驱动模块来控制左右电机,从而控制小车的前进及后退。同时,主控模块还会输出控制信号至显示模块以显示行距及时间,并控制语音提示模块适机发出提示音。电路系统框图如图1所示。
2 电硬件设计
2.1 主机控制模块
主机控制模块采用ATMEL公司生产的低电压、高性能8位单片机AT89S52,该单片机内含8 kB可反复擦写的只读存储器和256 Byte的随机数据存储器,其特点是高密度、非易失性存储、微功耗,系统稳定及可靠性高。此外,AT89S52技术成熟,价格低廉,参考资源丰富,且应用也较为广泛,再加之本系统能使该单片机资源得到充分的使用,故选择其作为智能小车电路的核心控制。
2.2 显示模块
显示模块使用16位字符型液晶(LED)显示。液晶显示屏具有低功耗、平面直角显示、可视面积大、画面效果好、分辨率高、抗干扰能力强的优点。并可直接使用单片机上I/O口,无需过多的外围器件便可实现多项功能。
2.3 电机及驱动模块
电机及驱动模块中的电机部分采用步进电机,该电机力矩大,精度高,只接收一个脉冲。就可转动一个固定的角度,因此利用晶体管组成的桥式驱动电路,单片机可较好地控制步进电机的速率、路程、转向等,可达到精密控制,且系统也较为稳定。此外由于系统对电机的精度及其灵敏度要求较高,而步进电机和该驱动电路的组合完全可达到这一要求,故采用步进电机和驱动电路。

驱动电路如图2所示。驱动模块是本设计的动力源,为此在信号线与主控板接口相连前,采用光耦器件PC817进行隔离,防止电路中大电流烧毁主控板器件;考虑到步进电机的输出力矩随工作频率下降较快,而低频时所需的电压又过低,若采用较高的电压有可能烧毁步进电机的驱动,为此要实现小车的精确控制对驱动则有一定的要求,需基本满足衡力矩输出。STA475A是一款电机驱动芯片,广泛应用于打印机及各种驱动控制板上,其NPN型的达林顿管。在此采用频率电压转换电路来补偿步进电机高频工作时所需的电压。V/F转换器件LM331的作用是将频率信号转化为电压信号,用此信号来控制大功率限流场效应管,保证驱动电流不会因频率过高而减小,以恒力矩输出,从而保证电动机的力矩能带动电动车顺利运行。
2.4 寻迹模块
自动寻迹是基于自动导引小车(Auto-Guided Vehicle,AGV)系统,实现小车自动识别路线,判断并自动规避障碍,以选择正确的行进路线。其采用与地面颜色有较大差别的线条作为引导,并使用传感器感知导引线和障碍判断。
实现机器人的视觉和接近觉功能有多种方式:(1)可使用CCD摄像头进行图像采集和识别方法,但不适用于小体积系统,且还涉及图像采集、图像识别等领域。(2)电容式接近传感器,基于检测对象表面靠近传感元件时的电容变化。(3)超声波传感器,根据波从发射到接收的传播过程中所受到的影响来检测物体的接近程度。(4)红外反射式光电传感器,其包括一个可发射红外光的固态发光二极管和一个用作接收器的固态光敏二极管。
系统的寻迹检测模块采用反射式红外传感器来检测跷跷板上的黑线,由于黑线可用黑笔直接在跷跷板轨道上画出,故可不考虑其质量对跷跷板的影响。红外传感器发射和接收均是不可见光,抗干扰能力强,灵敏度高,同时尺寸小、质量轻、外围电路简单,安装方便,因此用其作为近距离检测是较理想的。寻迹模块电路如图3所示,集成反射式光电传感器ST198的电压驱动为4.5~5 V。当发射二极管导通时,发出红外光线,使接收管的集电极和发射极间电阻变小,而比较器正向输入端电位被拉高,当红外光线照射到黑色线上时,反射光较少,接收管集电极和发射极间的电阻增大,则比较器正向输入端电位被拉低,单片机根据此信号控制电机的正反转动。[page]

2.5 平衡检测模块
平衡检测模块电路如图4所示。采用ADI公司出品的双轴加速度传感器ADXL202,该产品成本低、功耗小,且内部敏感元件和后续电路相集成。ADXL202传感器外围电路简单,同时输出为数字信号,抗干扰强、灵敏度高、易于用单片机控制,故选择该传感器作为本系统的平衡检测模块。

3 软件设计
根据各系统模块的选择,充分利用单片机AT89S52的资源,对单片机系统资源作如下分配:P1口控制步进电机,P0口和P2.5、P2.6、P2.7控制液晶显示,P2.1~P2.4连接红外检测模块,P3.2连接角度检测模快,P2.0、P3.7接转换开关,如图5所示。

当系统开始运行时,单片机首先读取电动机的初始角度,然后从P2.1~P2.4口读取当前红外传感器检测到的信号,判断小车是否在轨道上,然后校正小车方向,单片机从P1.0~P1.7口发脉冲控制电机的转动,使小车前进。在小车运动中,角度传感器将检测到的信号送入单片机,单片机判断小车是否到达平衡位置。当到达平衡位置后,角度传感器水平较正,小车停止5 s后继续向前进。而当到达轨道终点后,倒车返回原点,软件流程如图6所示。

4 结束语
经多次测试,该系统运行除机械部分不易控制外,电路与运行部分均较为稳定,简易车辆能自动完成在跷跷板上的前进和后退动作。设计还增加了对整个系统的保护功能,如利用V/F技术辅助电机的控制,确保电机能为小车负载提供足够的力矩。此外系统中还加入了语音提示、人性化显示等功能,使系统更加智能化、人性化。同时各电路模块也均有过流保护,消抖等辅助电路,使整个系统更加安全稳定。
上一篇:单片机设计的扩展键盘如何提高系统处理效率
下一篇:单片机设计:多路数据通信设计方案
推荐阅读最新更新时间:2024-03-16 13:40

 控制系统设计指南 (埃利斯)
控制系统设计指南 (埃利斯) 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题








- Discover mmWave 走进 TI 毫米波雷达世界 快速获得设计技能
- 【EEWORLD第四十二届】2012年09月社区明星人物揭晓!
- Microchip最新SAM 以及 PIC32单片机软件开发平台-- MPLAB® Harmony V3介绍 ”
- 三人行必有我师——EEworld网友原创教程隆重登场!
- 有奖直播|大唐恩智浦半导体 | 电池管理芯片方案设计和注意事项
- EEWORLD下载中心热力上线,岂能无礼!
- USB Tybe-C 知识大考问
- 【抢楼有礼】TI TMS320F28377S 入门经验大搜集!
- 来英飞凌旗舰店,探寻秋日好物!
- 2020-2021年安森美和安富利物联网创新设计大赛




 京公网安备 11010802033920号
京公网安备 11010802033920号