1 引言
测量转子速度的方法很多,但多数比较复杂。目前,测量转速的方法主要有四种:机械式、电磁式、光电式和激光式。机械式主要利用离心力原理,通过一个随轴转动的固定质量重锤带动自由轴套上下运动,根据不同转速对应不同轴套位置获得测量结果原理简单直接,不需额外电器设备,适用于精度要求不高、接触式的转速测量场合。电磁式系统由电磁传感器和安装在轴上的齿盘组成,主轴转动带动齿盘旋转,齿牙通过传感器时引起电路磁阻变化,经过放大整形后形成脉冲,通过脉冲得到转速值。由于受齿盘加工精度、齿牙最小分辨间隔、电路最大计数频率等限制,测量精度不能保证。光电式结构类似于电磁式结构,把旋转齿盘换作光电编码盘或黑白相间的反射条纹,把电磁传感器换作光电接收器,通过对反射回来的光脉冲信号计数得到测量结果。由于受条纹最小分辨间隔、电路最大计数频率等限制,测量精度不能保证,所测转速值和电磁式一样为两个计数脉冲间距的平均值。激光测速技术(LDV)是一种正在发展中的测速技术,通过激光多普勒效应获得转动体的瞬时角速度,理论上具有很高的瞬时转速测量精度,但目前实际产品精度不够高,并且价格昂贵,在实际使用上受到限制。通过改进已有的电磁式传感器,设计一种适于瞬时转速测量的新型传感器,在旋转机械瞬时状态分析中具有一定的实际意义。
本文以传统的电磁式系统为基础,研制一种使用红外辐射技术的新型转速测量仪,安装方便,对周围环境要求不高,可以很容易地完成转速的测量。具有较宽的动态测量范围,测量精度较高。
2 系统设计
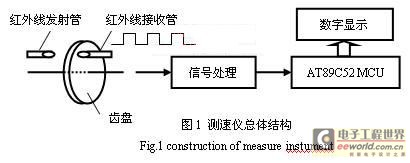
测速系统总体结构如图1所示,主要包括红外测速传感器(由红外发射与接收电路和齿盘组成)、信号处理电路、单片机以及数字显示部分。其工作过程如下:当齿盘旋转时,由于轮齿的遮挡,红外发射管与接收管之间的红外线光路时断时续,信号处理电路将此变化的光信号转换为电脉冲信号,一个脉冲信号即表示齿盘转过一个齿。单片机对脉冲进行计数,同时通过其内部的计时器对接收一定数目的脉冲计时,根据脉冲数目及所用时间就可计算出齿盘的转速,最后通过数字显示部分将转速显示出来。
2.1 系统硬件设计
根据红外测速的原理,系统的电路设计如图2所示。
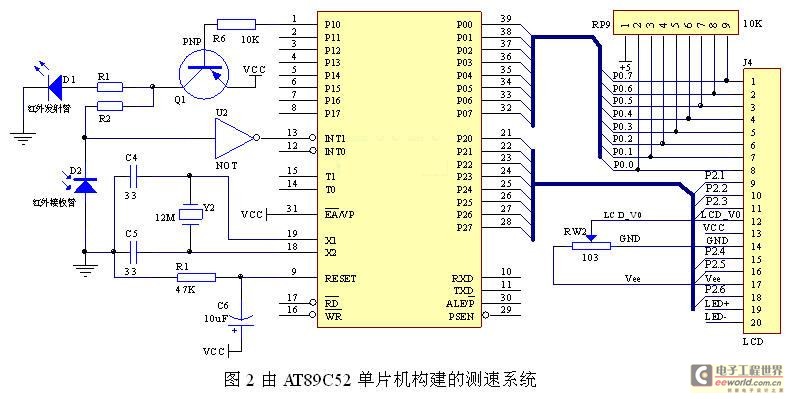
本系统采用AT89C52单片机,它是美国ATMEL公司生产的低电压,高性能CMOS8位单片机,片内含8KB的可反复擦写的Flash程序存储器和256B的随机数据存储器(RAM),器件采用ATMEL公司的高密度、非易失性存储技术生产,与标准MS-51指令系统及8052产品引脚兼容,片内置有8位中央处理器(CPU)。功能强大的AT89C52单片机适用于许多较为复杂的控制应用场合。
电路中选用红外光敏二极管作为受光器件,它与红外发光二极管一起组成一对红外发射接收管,红外光敏二极管在电路中处于反向工作状态。没有光照射时,光敏二极管处于截止状态,反向电阻很大,反向电流(暗电流)很小。随着光照的增强,光敏二极管处于导通状态,其反向电阻减小,反向电流(光电流)增大,其光电流与照度之间呈线性关系。
转速显示选用字符型液晶显示模块(LCM)JHD12864,可显示16×8或16×16点阵字符。其主控制驱动电路为HD44780,具有标准的接口特性,适配M6800系列和MCS-51系列MCU的操作时序;模块内部具有64个字节的自定义字符RAM,可自定义显示字符。该模块采用+5V电源供电,共有20个引脚,其与单片机的接口路如图2所示,其中可变电阻RW2用来调节显示器的对比度。
3.2 系统软件设计
3.2.1 计时方案的选择
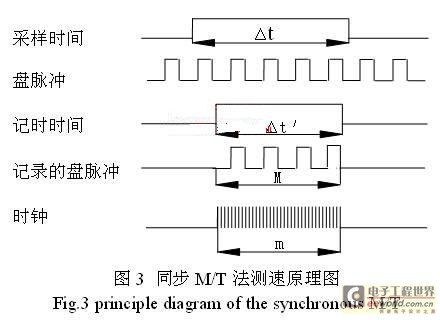
根据计时方案的不同,目前数字式转速测量装置的计时方法主要有M 法、T法和同步M/T法。M 法测速是在相等的时间间隔△t内读取脉冲数M,由M/△t计算出转速,速度越高在△t时间内计得的M 就越多,由±1个计数脉冲误差所引起的转速测量误差就越小,故该法适用于高速。T法测速是根据相邻两个脉冲时间间隔对应的时钟脉冲计数值m 来计算转速的,转速越慢或每转脉冲数越多,其计数值m就越多,计数器±l个计数脉冲所引起的误差就越小,故该法适用于低速。上述两种方法测量的绝对误差反比于速度采样时间T(Hp:时间间隔△t或计数值m),因此在稳态测量和实时性要求不高的场合,可取较大的T 以保证足够的测量精度。但在动态测量和实时控制系统中,往往对转速测量的实时性有较高的要求。因此,采样时间T不能随意取大,为了解决既要周期小,又要测速精度高的矛盾,可采用同步M/T法。这种方法的特点是不固定定时时间△t′,以记录到完整的盘脉冲为准,主要是设法使M 与△t′同步,从整数个盘脉冲开始计时,同样在整数个盘脉冲结束计时,记录到的是整数个盘脉冲,且与计时是“同步” 的。其原理如图3所示,在采样时间△t时间内实际计时时间△t′开始于第一盘脉冲的下降沿,终止于最后一个脉冲的下降沿,因而得到整数个盘脉冲,消除了M 法和T法中±1个脉冲引入的误差。鉴于几种方法的比较,在设计中采用同步M/T法设计本测速系统。
[page]
3.2.2 软件结构划分
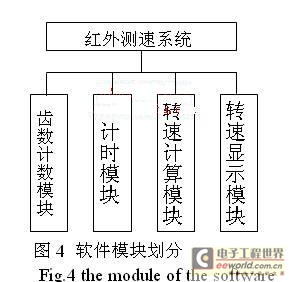
采用结构化软件设计的方法,使得设计简单,易于调试和移植,提高编程效率。采用结构化设计软件的方法将本系统软件划分为图4所示的4个模块:齿数计数模块、计时模块、转速计算模块和转速显示模块。其中最主要的是计时模块和转速计算模块。
(1) 计时模块
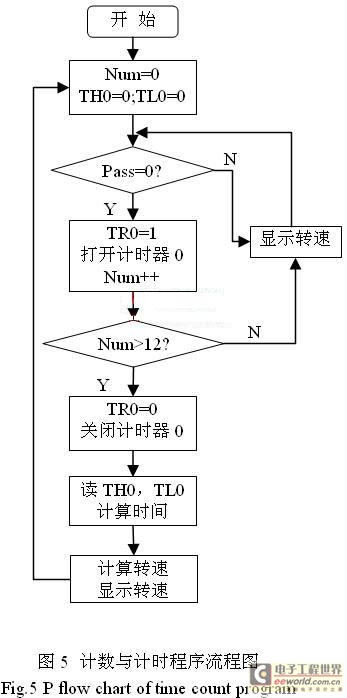
由图2可知当红外线发射管发射的红外线未被轮齿挡住时,接收管受红外线照射呈导通状态,经反相器输入到单片机中断端口的电压为高电平,不产生中断;而当红外线发射管发射的红外线被轮齿挡住时,接收管不受红外线照射则呈截止状态,经反相器输入到单片机中断端口的电压跳变为低电平。从而激活中断程序对脉冲进行计数。计数流程图如图5所示。由于计数需要与计时同步,所以需要在产生第一次红外光被挡住时(红外光被挡住时Pass=0,反之Pass=1),也即中断口电位由高变低时打开定时器。由于实验中的齿盘共有108个齿,为了提高测量的实时性,把108个齿分成9等份,当计数值(Num)为12时关闭定时器并读取定时器的计时值。
(2) 转速计算模块
由于系统采用同步M/T法测量转速,所以计算转速时,需要的参数有盘脉冲数和计时值。本系统中AT89C52单片机采用频率为12MHz的外接晶振,则每个机器周期为1us。单片机定时器的计数脉冲周期为一个机器周期,若定时器从零开时计数,关闭定时器时其计数值为m,则计时时间就是m微秒。计算转速部分程序如下。
m=TH0×256 //读出计数器的计数变量TH0,并将其左移8位
m=TH0+TL0 //获得时钟脉冲数
time=m //计算出计时时间
n=60*106/(9*time) //计算转速r/min
5 结束语
本文作者的创新点是以红外传感器代替了传统的电磁式传感器,系统的硬件电路简单,测量转速范围较宽,且具有较高的测量精度,对于低转速的测量也有相当高的精度。并充分利用了单片机的内部资源,有很高的性价比。可用于各行业转速的非接触式检测和控制中。
关键字:红外线 单片机 转速测量仪
引用地址:一种基于单片机的转速测量仪研究及设计
测量转子速度的方法很多,但多数比较复杂。目前,测量转速的方法主要有四种:机械式、电磁式、光电式和激光式。机械式主要利用离心力原理,通过一个随轴转动的固定质量重锤带动自由轴套上下运动,根据不同转速对应不同轴套位置获得测量结果原理简单直接,不需额外电器设备,适用于精度要求不高、接触式的转速测量场合。电磁式系统由电磁传感器和安装在轴上的齿盘组成,主轴转动带动齿盘旋转,齿牙通过传感器时引起电路磁阻变化,经过放大整形后形成脉冲,通过脉冲得到转速值。由于受齿盘加工精度、齿牙最小分辨间隔、电路最大计数频率等限制,测量精度不能保证。光电式结构类似于电磁式结构,把旋转齿盘换作光电编码盘或黑白相间的反射条纹,把电磁传感器换作光电接收器,通过对反射回来的光脉冲信号计数得到测量结果。由于受条纹最小分辨间隔、电路最大计数频率等限制,测量精度不能保证,所测转速值和电磁式一样为两个计数脉冲间距的平均值。激光测速技术(LDV)是一种正在发展中的测速技术,通过激光多普勒效应获得转动体的瞬时角速度,理论上具有很高的瞬时转速测量精度,但目前实际产品精度不够高,并且价格昂贵,在实际使用上受到限制。通过改进已有的电磁式传感器,设计一种适于瞬时转速测量的新型传感器,在旋转机械瞬时状态分析中具有一定的实际意义。
本文以传统的电磁式系统为基础,研制一种使用红外辐射技术的新型转速测量仪,安装方便,对周围环境要求不高,可以很容易地完成转速的测量。具有较宽的动态测量范围,测量精度较高。
2 系统设计
测速系统总体结构如图1所示,主要包括红外测速传感器(由红外发射与接收电路和齿盘组成)、信号处理电路、单片机以及数字显示部分。其工作过程如下:当齿盘旋转时,由于轮齿的遮挡,红外发射管与接收管之间的红外线光路时断时续,信号处理电路将此变化的光信号转换为电脉冲信号,一个脉冲信号即表示齿盘转过一个齿。单片机对脉冲进行计数,同时通过其内部的计时器对接收一定数目的脉冲计时,根据脉冲数目及所用时间就可计算出齿盘的转速,最后通过数字显示部分将转速显示出来。
2.1 系统硬件设计
根据红外测速的原理,系统的电路设计如图2所示。
本系统采用AT89C52单片机,它是美国ATMEL公司生产的低电压,高性能CMOS8位单片机,片内含8KB的可反复擦写的Flash程序存储器和256B的随机数据存储器(RAM),器件采用ATMEL公司的高密度、非易失性存储技术生产,与标准MS-51指令系统及8052产品引脚兼容,片内置有8位中央处理器(CPU)。功能强大的AT89C52单片机适用于许多较为复杂的控制应用场合。
电路中选用红外光敏二极管作为受光器件,它与红外发光二极管一起组成一对红外发射接收管,红外光敏二极管在电路中处于反向工作状态。没有光照射时,光敏二极管处于截止状态,反向电阻很大,反向电流(暗电流)很小。随着光照的增强,光敏二极管处于导通状态,其反向电阻减小,反向电流(光电流)增大,其光电流与照度之间呈线性关系。
转速显示选用字符型液晶显示模块(LCM)JHD12864,可显示16×8或16×16点阵字符。其主控制驱动电路为HD44780,具有标准的接口特性,适配M6800系列和MCS-51系列MCU的操作时序;模块内部具有64个字节的自定义字符RAM,可自定义显示字符。该模块采用+5V电源供电,共有20个引脚,其与单片机的接口路如图2所示,其中可变电阻RW2用来调节显示器的对比度。
3.2 系统软件设计
3.2.1 计时方案的选择
根据计时方案的不同,目前数字式转速测量装置的计时方法主要有M 法、T法和同步M/T法。M 法测速是在相等的时间间隔△t内读取脉冲数M,由M/△t计算出转速,速度越高在△t时间内计得的M 就越多,由±1个计数脉冲误差所引起的转速测量误差就越小,故该法适用于高速。T法测速是根据相邻两个脉冲时间间隔对应的时钟脉冲计数值m 来计算转速的,转速越慢或每转脉冲数越多,其计数值m就越多,计数器±l个计数脉冲所引起的误差就越小,故该法适用于低速。上述两种方法测量的绝对误差反比于速度采样时间T(Hp:时间间隔△t或计数值m),因此在稳态测量和实时性要求不高的场合,可取较大的T 以保证足够的测量精度。但在动态测量和实时控制系统中,往往对转速测量的实时性有较高的要求。因此,采样时间T不能随意取大,为了解决既要周期小,又要测速精度高的矛盾,可采用同步M/T法。这种方法的特点是不固定定时时间△t′,以记录到完整的盘脉冲为准,主要是设法使M 与△t′同步,从整数个盘脉冲开始计时,同样在整数个盘脉冲结束计时,记录到的是整数个盘脉冲,且与计时是“同步” 的。其原理如图3所示,在采样时间△t时间内实际计时时间△t′开始于第一盘脉冲的下降沿,终止于最后一个脉冲的下降沿,因而得到整数个盘脉冲,消除了M 法和T法中±1个脉冲引入的误差。鉴于几种方法的比较,在设计中采用同步M/T法设计本测速系统。
[page]
3.2.2 软件结构划分
采用结构化软件设计的方法,使得设计简单,易于调试和移植,提高编程效率。采用结构化设计软件的方法将本系统软件划分为图4所示的4个模块:齿数计数模块、计时模块、转速计算模块和转速显示模块。其中最主要的是计时模块和转速计算模块。
(1) 计时模块
由图2可知当红外线发射管发射的红外线未被轮齿挡住时,接收管受红外线照射呈导通状态,经反相器输入到单片机中断端口的电压为高电平,不产生中断;而当红外线发射管发射的红外线被轮齿挡住时,接收管不受红外线照射则呈截止状态,经反相器输入到单片机中断端口的电压跳变为低电平。从而激活中断程序对脉冲进行计数。计数流程图如图5所示。由于计数需要与计时同步,所以需要在产生第一次红外光被挡住时(红外光被挡住时Pass=0,反之Pass=1),也即中断口电位由高变低时打开定时器。由于实验中的齿盘共有108个齿,为了提高测量的实时性,把108个齿分成9等份,当计数值(Num)为12时关闭定时器并读取定时器的计时值。
(2) 转速计算模块
由于系统采用同步M/T法测量转速,所以计算转速时,需要的参数有盘脉冲数和计时值。本系统中AT89C52单片机采用频率为12MHz的外接晶振,则每个机器周期为1us。单片机定时器的计数脉冲周期为一个机器周期,若定时器从零开时计数,关闭定时器时其计数值为m,则计时时间就是m微秒。计算转速部分程序如下。
m=TH0×256 //读出计数器的计数变量TH0,并将其左移8位
m=TH0+TL0 //获得时钟脉冲数
time=m //计算出计时时间
n=60*106/(9*time) //计算转速r/min
5 结束语
本文作者的创新点是以红外传感器代替了传统的电磁式传感器,系统的硬件电路简单,测量转速范围较宽,且具有较高的测量精度,对于低转速的测量也有相当高的精度。并充分利用了单片机的内部资源,有很高的性价比。可用于各行业转速的非接触式检测和控制中。
上一篇:一种基于单片机的高精度测温装置的设计
下一篇:一种基于单片机的汽车电磁阀质量测试电源的设计
推荐阅读最新更新时间:2024-03-16 13:53
基于C8051F410单片机实现双频固定式阅读器的应用方案

随着当前物流行业的快速发展。作为物流主要运输方式的集装箱运输.其运输效率及货运安全性日益受到人们关注。近几年来,随着RFID技术的发展和推广,将RFID技术用于集装箱信息识别.实现集装箱运输的智能化已经成为各集装箱厂家竞相开发的目标。RFID技术是一种利用射频通信方法实现的非接触式、快速、实时和准确的采集与处理信息的自动射频识别技术。目前集装箱运输上对RFlD技术的应用仅仅限于利用阅读器射频信道识别电子标签内集装箱信息.并有实现其运输安全上的保证。本文设计了一种基于C8051F410单片机的双频固定式阅读器。该阅读器与智能集装箱安全设备及路标设备配合实用.不仅能快速识别集装箱信息,而且能监测集装箱内货物的安全。一旦集装箱被非法打开
[单片机]

PIC单片机的 程序存储器,数据存储器,EEPROM区别
PIC的程序存储器是FLASH存储器,主要存储程序代码,掉电不丢失。 数据存储器是SRAM,主要存储一些程序的变量,掉电丢失。 EEPROM一般存储程序中的重要数据,掉电也不丢失。 区别: FLASH: 只能块擦除(叫块擦除更准确吧,原文是BLOCK),举例说明:比如你用的FLASH的BLOCK是512个字节(不同的FLASH大小不同),那么只有擦除过(所有位写 1 )的BLOCK才能重新写入,意思就是只能从 1 写到 0 ,如果要从 0 改到 1 必须整块擦除,而且擦除时的速度相对写入和读出要慢很多。FLASH主要用于程序存储。 EEPROM; 可以单字节操作,没有块擦除的要求。相对FLASH更为灵
[单片机]
MCU内核架构发展历史及主流内核IP的发展情况
网报道(文/程文智、李宁远)目前,已经渗透到我们生活的各个领域,几乎很难找到有哪个领域没有MCU的踪迹。不论是家用电器、仪器仪表、智能手机、平板电脑、键盘鼠标、仪器仪表、或者是金融系统、医疗设备、通信、汽车、航空航天等领域都有MCU的身影。 这一点从MCU的出货量上也可以明显看出来,据IC Insights统计,全球MCU产品出货量从2015年的221亿颗,增长至2020年的361亿颗,2021年甚至可达到395亿颗。市场规模也在这两年的缺货涨价的行情中快速增长,2020年的市场规模为197亿美元,2021年增长了11%达到了215亿美元,预计今年还会继续增长。 国内MCU市场经过三十多年的发展,不论是市场,还是产品技术也都得到了很
[机器人]
单片机内部密码破解方法
1 引言 单片机(Microcontroller)一般都有内部ROM/EEPROM/FLASH供用户存放程序。为了防止未经授权访问或拷贝单片机的机内程序,大部分单片机都带有加密锁定位或者加密字节,以保护片内程序。如果在编程时加密锁定位被使能(锁定),就无法用普通编程器直接读取单片机内的程序,这就是所谓拷贝保护或者说锁定功能。事实上,这样的保护措施很脆弱,很容易被破解。单片机攻击者借助专用设备或者自制设备,利用单片机芯片设计上的漏洞或软件缺陷,通过多种技术手段,就可以从芯片中提取关键信息,获取单片机内程序。因此,作为电子产品的设计工程师非常有必要了解当前单片机攻击的最新技术,做到知己知彼,心中有数,才能有效防止自己花费大量
[单片机]
MSP430单片机在电力系统操作电源中的应用
随着 电力 系统现代自动化水平的提高以及高频 开关 电源 结构的日趋复杂,促使人们采用新的 控制 手段来迅速反映模块变化,以大幅度提高 开关 电源 模块稳定运行水平.在整个 控制 系统中,要求处理采样数据及采用的算法也越来越多.传统的微处理器如MSC51系列等 单片机 由于内部集成资源相对少、外围 电路 复杂、系统抗干扰能力差、不擅长数据处理的缺点以逐渐不能满足高科技水平的需要. MSP430系列单片机是美国德州仪器(TI)1996年开始推向市场的一种16位超低功耗的混合信号处理器. 由于其超低功耗、强大的处理能力、高性能 模拟 技术及丰富的片上外围模块、系统工作稳定、方便高效的开发环境得到广大用户的高度评价。本文采用MSP43
[电源管理]
单片机小白学习之路(二十七)---EEPROM-IIC总线理解(二)
目标:EEPROM-IIC总线理解(二) 在实际的应用中,保存在单片机RAM中的数据,掉电后数据就丢失了,保存在单片机的FLASH中的数据,又不能随意改变,也就是不能用它来记录变化的数值。但是在某些场合,我们又确实需要记录下某些数据,而它们还时常需要改变或更新,掉电之后数据还不能丢失,比如我们的家用电表度数,我们的电视机里边的频道记忆,一般都是使用EEPROM来保存数据,特点就是掉电后不丢失。我们板子上使用的这个器件是24C02,是一个容量大小是2Kbit位,也就是256个字节的EEPROM。一般情况下,EEPROM拥有30万到100万次的寿命,也就是它可以反复写入30-100万次,而读取次数是无限的。 24C02是一个基于I
[单片机]
单片机PIC16LF874在电容测量模块中的应用
电容式传感器已广泛应用于工业、医学、军事等领城。但目前大部分电容测量方法集成化水平低、精度低,因而对电容特别是对微小电容的精确测量始终是一个很重要的内容。振荡法电路结构简单、抗干扰能力差,板间内电容影响测量结果;电桥法利用电桥平衡原理测量电容,测量结果受桥臂电容性能影响较大。本文用到美国MICmChip公司PICl6LF874单片机,该单片机采用RISC精简指令集、哈佛总线结构、流水线指令方式,具有抗干扰能力强、功耗低、高性能、价格低等特性。 1 PIC16LF874单片机 PIC16系列单片机采用精简指令集(Reduced InSTructiON Set Computer,RISC)结构,突破了传统单片机对PC
[单片机]
采用AT89S52单片机实现机载电气盒测试仪的设计与用途介绍
1 引言 AT89S52是一种低功耗、高性能CMOS8位微控制器,具有8K 在系统可编程Flash 存储器。AT89S52使用Atmel 公司高密度非易失性存储器技术制造,与工业80C51 产品指令和引脚完全兼容。片上Flash允许程序存储器在系统可编程,亦适于常规编程器。在单芯片上,AT89S52拥有灵巧的8 位CPU 和在系统可编程Flash,使得AT89S52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。AT89S52具有以下标准功能: 8k字节Flash,256字节RAM,32 位I/O 口线,看门狗定时器,2 个数据指针,三个16 位定时器/计数器,一个6向量2级中断结构,全双工串行口,片内晶振及时钟电路。另外,
[单片机]
 单片机创新实践应用.
单片机创新实践应用. 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用
小广播
热门活动
换一批
更多
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章

更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
11月13日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号