stm32是支持对自身Flash(code区)进行读写的。所以,在某些需要掉电保存的场合,我们可以利用这一特性节省一个外部的Flash或者EEPROM,对数据进行保存。
但是,如果需要经常性的保存数据,就会对固定地址的Flash进行频繁的擦写,大大损耗Flash的寿命。在这种时候,就需要用到动态平衡的方法进行处理了。原理:
一、Flash擦写寿命
根据网上查阅的资料,单个NOR Flash地址的寿命,是受擦写次数的影响的。再具体一点,单个地址上的每个位,分别独立。比如0x08011000这个地址,共有8个bit,假设我一直令这个地址的数据循环为0x01与0x00。那么bit0位就会一直被擦写。循环几万次后bit0位就有可能损坏而不能擦写。但是bit0损坏并不影响其他位的功能,比如bit1位,还是能正常使用。
二、stm32读写NOR Flash
stm32读写自身Flash是半字的,也就是说一次读或者写都是两个字节的。所以下面的标志域也好,数据域也好,都是按照半字为单位进行统计的。
三、平衡方案

假设我们打算在0x08001000这个地址开始,利用数据域为Count个半字大小的空间,进行数据存储。将Flash分为3个区域。
1、初始化标志域
2、标志域
3、数据域
(1)初始化标志域:用来存储起始地址(Addr),以及数据域的半字的个数(Count)。且在初始化时进行判断,当起始地址或者数据域个数发生变化,重新进行初始化。
(2)标志域:标志域半字的个数 = 数据域半字个数除以16。每个标志域半字管理着16个数据半字。标志域半字里面的每一个bit,对应着数据的一个半字。比如标志域第一个半字为0x0001,代表着数据域的第一个半字已经被写过了。此时如果需要存储数据,应存储到数据域的第二个半字,且在存储完成后将标志域的第一个半字左移1位并+1,令其变为:0x0003。下一次,则应在数据域第三个半字进行存储数据,且存储完成后标志域变为:0x0007。
这么做的目的,是平衡利用标志域的每一个bit,使它们擦写次数一致。
(3)数据域:存储着我们想要掉电保存的数据。这个区域占用空间很大,每存储一次数据变换一次地址,直到整个数据域都被存储了一遍。
(4)标志域与数据域对应关系:第一个标志域半字对应着前16个数据域半字,第二个对应着接下来的16个。以此类推。
如起始地址为:0x08001000,那标志域的第一个半字地址为:0x08001006与0x08001007这两个字节(stm32读写半字)
这个地址的数据假设为0x0001,即:0000 0000 0000 0001,这里的bit0为1,对应着数据域第一个半字地址,且为1则
表示上次数据存储在第一个半字,bit1为0对应着数据域的第二个半字地址。以此类推bit15就对应着数据域第16个数据域
半字。第二个标志域半字,它的bit0就对应着数据域的第17个半字,bit1对应第18个。。。。。。
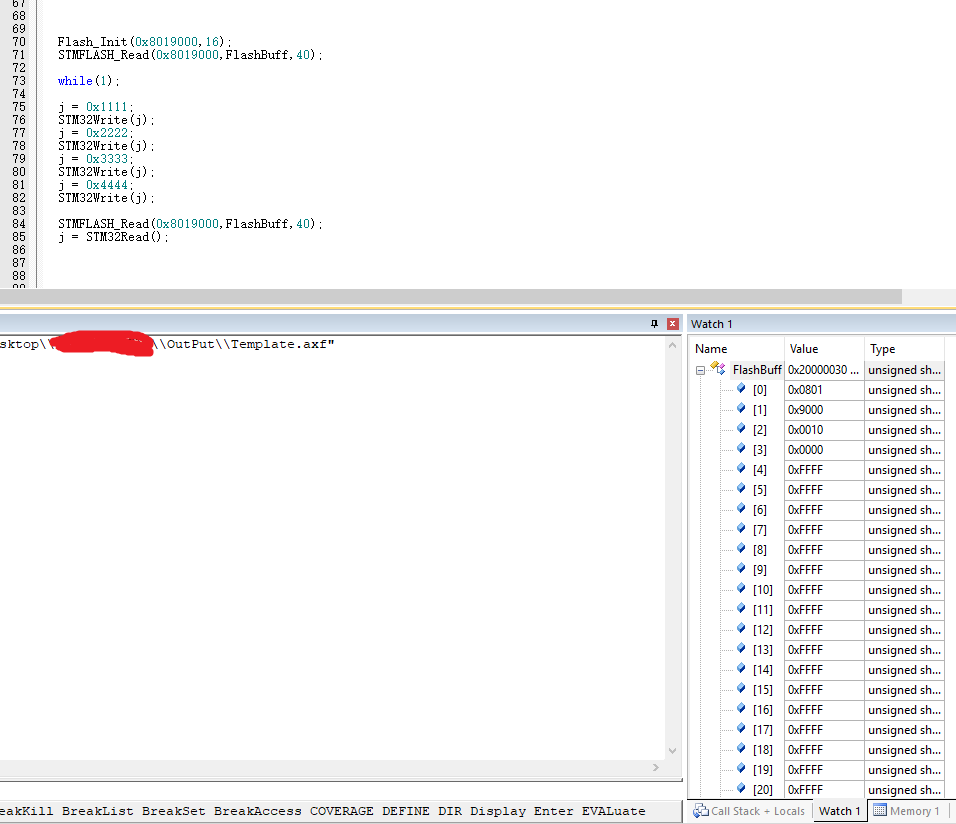
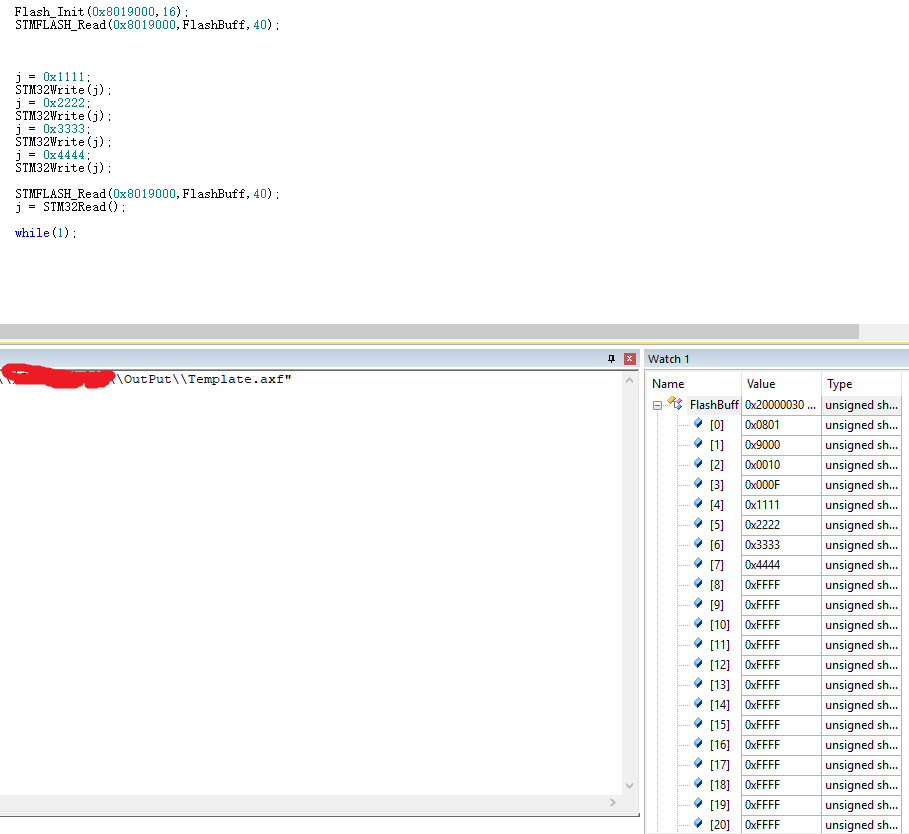
(5)假设从0x08018000这个地址开始,Count数量为16进行存储。存储了4次,第一次数据是0x1111,第二次是0x2222第三次0x3333,第四次0x4444,那么在Flash这些数据分布将如下:

四、程序流程
(1)初始化:
1、读取Flash上的Addr与Count,与当前输入的Addr与Count对比,不一致则进行初始化。
2、如果需要初始化,则将标志域所有半字清零,且将当前Addr与Count写进初始化标志域。
(2)写数据:
1、遍历标志域,判断是否存在不为0xffff的地址
2、若是标志域所有地址都为0xffff,则清零标志域,数据存储在数据域第一个半字地址
3、若是有标志域地址不为0xffff,则遍历出为0的最低位,然后将数据存储在对应的数据域半字地址。
(3)读数据
过程与写数据类似,目的在于读取出数据域中最晚存储的数据。
五、代码
/*****************************读写内部Flash部分代码***************************/
#include "bsp_stm32flash.h"
//代码转自原子stm32战舰开发板
//读半字
u16 STMFLASH_ReadHalfWord(u32 faddr)
{
return *(vu16*)faddr;
}
//写16位数据,不校验
void STMFLASH_Write_NoCheck(u32 WriteAddr,u16 *pBuffer,u16 NumToWrite)
{
u16 i;
for(i=0;i { FLASH_ProgramHalfWord(WriteAddr,pBuffer[i]); WriteAddr+=2;//地址增加 2. } } #define STM_SECTOR_SIZE 1024 //字节 u16 STMFLASH_BUF[STM_SECTOR_SIZE/2];//最多是2K字节 //1, 该地址必须是用户代码区以外的地址。 //2, 该地址必须是 2 的倍数。 void STMFLASH_Write(u32 WriteAddr,u16 *pBuffer,u16 NumToWrite) { u32 secpos; //扇区地址 u16 secoff; //扇区内偏移地址(16位字计算) u16 secremain; //扇区内剩余地址(16位字计算) u16 i; u32 offaddr; //去掉0X08000000后的地址 if(WriteAddr FLASH_Unlock(); //解锁 offaddr=WriteAddr-STM32_FLASH_BASE; //实际偏移地址. secpos=offaddr/STM_SECTOR_SIZE; //扇区地址 0~127 for STM32F103RBT6 secoff=(offaddr%STM_SECTOR_SIZE)/2; //在扇区内的偏移(2个字节为基本单位.) secremain=STM_SECTOR_SIZE/2-secoff; //扇区剩余空间大小 if(NumToWrite<=secremain)secremain=NumToWrite;//不大于该扇区范围 while(1) { STMFLASH_Read(secpos*STM_SECTOR_SIZE+STM32_FLASH_BASE,STMFLASH_BUF,STM_SECTOR_SIZE/2);//读出整个扇区的内容 for(i=0;i { if(STMFLASH_BUF[secoff+i]!=0XFFFF)break;//需要擦除 } if(i { FLASH_ErasePage(secpos*STM_SECTOR_SIZE+STM32_FLASH_BASE);//擦除这个扇区 for(i=0;i { STMFLASH_BUF[i+secoff]=pBuffer[i]; } STMFLASH_Write_NoCheck(secpos*STM_SECTOR_SIZE+STM32_FLASH_BASE,STMFLASH_BUF,STM_SECTOR_SIZE/2);//写入整个扇区 }else STMFLASH_Write_NoCheck(WriteAddr,pBuffer,secremain);//写已经擦除了的,直接写入扇区剩余区间. if(NumToWrite==secremain)break;//写入结束了 else//写入未结束 { secpos++; //扇区地址增1 secoff=0; //偏移位置为0 pBuffer+=secremain; //指针偏移 WriteAddr+=secremain; //写地址偏移 NumToWrite-=secremain; //字节(16位)数递减 if(NumToWrite>(STM_SECTOR_SIZE/2))secremain=STM_SECTOR_SIZE/2;//下一个扇区还是写不完 else secremain=NumToWrite;//下一个扇区可以写完了 } }; FLASH_Lock();//上锁 } //从指定地址开始读出指定长度的数据 //ReadAddr:起始地址 //pBuffer:数据指针 //NumToWrite:半字(16位)数 void STMFLASH_Read(u32 ReadAddr,u16 *pBuffer,u16 NumToRead) { u16 i; for(i=0;i { pBuffer[i]=STMFLASH_ReadHalfWord(ReadAddr);//读取2个字节. ReadAddr+=2;//偏移2个字节. } } /*******************头文件******************/ #ifndef __bsp_stm32flash_H #define __bsp_stm32flash_H #include "stm32f10x.h" #define STM32_FLASH_SIZE 256 //所选STM32的FLASH容量大小(单位为K) //FLASH起始地址 #define STM32_FLASH_BASE 0x08000000 //STM32 FLASH的起始地址 u16 STMFLASH_ReadHalfWord(u32 faddr); //读出半字 void STMFLASH_WriteLenByte(u32 WriteAddr,u32 DataToWrite,u16 Len); //指定地址开始写入指定长度的数据 u32 STMFLASH_ReadLenByte(u32 ReadAddr,u16 Len); //指定地址开始读取指定长度数据 void STMFLASH_Write(u32 WriteAddr,u16 *pBuffer,u16 NumToWrite); //从指定地址开始写入指定长度的数据 void STMFLASH_Read(u32 ReadAddr,u16 *pBuffer,u16 NumToRead); //从指定地址开始读出指定长度的数据 #endif /*************************平衡方案代码*********************/ //Flash管理 typedef struct { u32 Addr; //数据存储起始地址,注意不要超过Flash的最大范围 u16 Count; //数据域的半字数,应为16的倍数 }Flash_Man; Flash_Man F_S; //Addr: 数据存储起始地址,注意不要超过Flash的最大范围 //Count:数据域的半字数,应为16的倍数 //返回值:0 初始化成功 1 初始化失败 u8 Flash_Init(u32 Addr,u16 Count) { u16 i; u16 temp[3] = {0,0,0}; u32 addr_temp = 0; F_S.Count = Count; F_S.Addr = Addr; /*******读取初始化标志块数据并比较,判断是否已初始化*******/ STMFLASH_Read(Addr,temp,3); addr_temp = (temp[0]<<16) + temp[1]; if(temp[2] == Count && addr_temp == Addr) { return 1; } if( (Count%16) != 0 || Count == 0) return 2; //排除错误的Count值 /*********************标志域清0***********************/ temp[0] = 0; for(i=0;i { STMFLASH_Write(F_S.Addr+6+i*2,temp,1); } /*************将Addr与Count写入初始化标志块****************/ temp[0] = Addr>>16; temp[1] = Addr&0x0000ffff; temp[2] = Count; STMFLASH_Write(F_S.Addr,temp,3); return 0; } void STM32Write(u16 pdat) { u16 temp = 0; u16 i,j; u16 buff; u32 Add_Flag=F_S.Addr+6,DataAddr; for(i=0;i { STMFLASH_Read(Add_Flag+i*2,&buff,1); //读取标志域数据到缓冲区 if(buff!=0xffff) break; //判断是否存在未被写入的数据块 } if(i==F_S.Count/16) //遍历完不能找到空闲的标志位 { for(i=0;i { STMFLASH_Write(Add_Flag+i*2,&temp,1); //标志域清0 } temp = 1; STMFLASH_Write(Add_Flag,&temp,1); //标志域第一个地址块第一个位设为已写状态 STMFLASH_Write(Add_Flag+F_S.Count/16*2,&pdat,1); //在数据域第一个地址块写入数据 } else //遍历完找到空闲的标志位 { temp = (buff<<1) + 1; //标志位进位 for(j=0;j<16;j++) //找到空闲标志位的空闲bit { if(buff&0x0001) buff>>=1; else break; } DataAddr = Add_Flag + F_S.Count/16*2 + i*16*2 + j*2; //计算数据应被写入的地址 STMFLASH_Write(Add_Flag+i*2,&temp,1); //写入标志位 STMFLASH_Write(DataAddr,&pdat,1); //写入数据 } } u16 STM32Read(void) { u16 temp = 0; u16 i,j; u16 buff; u32 Add_Flag=F_S.Addr+6,DataAddr; for(i=0;i { STMFLASH_Read(Add_Flag+i*2,&buff,1); //读取标志域数据到缓冲区 if(buff!=0xffff) break; //判断是否存在未被写入的数据块 } if(i==F_S.Count/16) //遍历完不能找到空闲的标志位 { STMFLASH_Read(Add_Flag + F_S.Count/8 + F_S.Count*2 - 2,&temp,1); } else //遍历完找到空闲的标志位 { for(j=0;j<16;j++) //找到空闲标志位的空闲bit { if(buff&0x0001) buff>>=1; else break; } DataAddr = Add_Flag + F_S.Count/8 + i*16*2 + j*2 -2; //计算数据应被读取的地址 STMFLASH_Read(DataAddr,&temp,1); //读取数据 } return temp; } 初始化: 执行完毕: 六、补充 1、代码并没有实现所有功能,例如数据校验。当某个地址擦写失效,应该跳过并将数据存储在下一地址。这里只是简单的实现了动态的平衡存储。一个bit管理2个字节的数据,所以效率约为 16/17 = 94%,这里忽略了初始化标志域的空间。 2、STM32F1 NOR Flash的擦写是支持page擦除的,如果将数据存储在某个page,然后page还有其他的数据。那么擦除 的时候是会将其他数据也擦除的。虽然程序有缓存page数据功能不会丢失数据,但建议单独用一个page进行数据的存储。且其他系列,如F2系列只支持sector擦除,F2 Flash的后面几个sector容量高达128KB,不利于我们进行数据管理。这种情况应用其他方案。如前面一个sector(16KB)存储数据,程序存在后面的sector。这里涉及IAP,不祥述。 3、还有其他的功能,比如说同时存储或读取多个数据,并没有延伸。有需要的可以自己研究研究
上一篇:STM32HAL----USB模拟串口(VCP)
下一篇:STM32----ADC进行信号(跳变沿、PWM)的捕获
推荐阅读最新更新时间:2024-03-16 16:07

 ESP32-C6 系列芯片手册
ESP32-C6 系列芯片手册 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题












 京公网安备 11010802033920号
京公网安备 11010802033920号