摘要:简要介绍RTX51 TINY的基本情况和使用方法;详细分析这个内核的任务管理和内存管理的运行机制,并给出其主要代码流程图。
关键词:单片机 实时操作系统的RTX51
1 RTX51简介
1.1 RTX51 TINY特性
RTX51是KEIL公司开发的用于8051系列单片机的多任务实时操作系统。它有两个版本,RTX51 FULL和RTX51 TINY。
RTX51 TINY是RTX51 FULL的子集,仅支持按时间片循环任务调度,支持任务间信号传递,最大16个任务,可以并行地利用中断。具有以下等待操作:超时、另一个任务或中断的信号。但它不能进行信息处理,不支持存储区的分配和释放,不支持占先式调度。RTX51 TINY一个很小的内核,完全集成在KEIL C51编译器中。更重要的是,它仅占用800字节左右的程序存储空间,可以在没有外放数据存储器的8051系统中运行,但应用程序仍然可以访问外部存储器。RTX51 TINY下文简称为内核。
1.2 RTX51 TINY的使用
内核完全集成在KEIL C51编译器中,
 以系统函数调用的方式运行,因此可以很容易地使用KEIL C51语言编写和编译一个多任务程序,并嵌入到实际应用系统中。内核提供以下函数供应用程序引用:
①char os_create_task(task_id);
②char os_delete_task(task_id);
③char os_send_signal(task_id);
④char isr_send_signal(task_id);
⑤char os_clear_signal(task_id);
⑥char os_running_task_id(void);
⑦char os_wait(event_sel,ticks,dummy)。
各函数的函数原型和具体意义。
2 RTX51 TINY内核分析
2.1 任务状态
RTX51 TINY的用户任务具有以下几个状态。
*RUNNING:任务处于运行中,同一时间只有一个任务可以处于“RUNNING”状态。
*READY:任务正在等待运行,在当前运行的任务时间片完成之后,RTX51 TINY运行下一个处于“READY”状态的任务。
*WAITING:任务等待一个事件。如果所等待的事件发生的话,任务进入“READY”状态。
*DELETED:任务不处于执行队列。
*TIME OUT:任务由于时间片用完而处于“TIME OUT”状态,并等待再次运行。该状态写“READY”状态相似,但由于是内部操作过程使一个循环任务被切换而被冠以标记。
图1所示为任务状态转换图。
以系统函数调用的方式运行,因此可以很容易地使用KEIL C51语言编写和编译一个多任务程序,并嵌入到实际应用系统中。内核提供以下函数供应用程序引用:
①char os_create_task(task_id);
②char os_delete_task(task_id);
③char os_send_signal(task_id);
④char isr_send_signal(task_id);
⑤char os_clear_signal(task_id);
⑥char os_running_task_id(void);
⑦char os_wait(event_sel,ticks,dummy)。
各函数的函数原型和具体意义。
2 RTX51 TINY内核分析
2.1 任务状态
RTX51 TINY的用户任务具有以下几个状态。
*RUNNING:任务处于运行中,同一时间只有一个任务可以处于“RUNNING”状态。
*READY:任务正在等待运行,在当前运行的任务时间片完成之后,RTX51 TINY运行下一个处于“READY”状态的任务。
*WAITING:任务等待一个事件。如果所等待的事件发生的话,任务进入“READY”状态。
*DELETED:任务不处于执行队列。
*TIME OUT:任务由于时间片用完而处于“TIME OUT”状态,并等待再次运行。该状态写“READY”状态相似,但由于是内部操作过程使一个循环任务被切换而被冠以标记。
图1所示为任务状态转换图。
 2.2 同步机制
为了能保证任务在执行次序上的协调,必须采用同步机制。内核用以下事件进行任务间的通信和同步。
①SIGNAL:用于任务之间通信的位,可以用系统函数置位或清除。如果一个任务调用os_wait函数等待SIGNAL而SIGNAL未置位,则该任务被挂起直到SIGNAL置位,才返回到READY状态,并可被再次执行。
②TIMEOUT:由os_wait函数开始的时间延时,其持续时间可由定时节拍数确定。带 有TIMEOUT值调用os_wait函数的任务将被挂起,直到延时结束,才返回到READY状态,并可被再次执行。
③INTERVAL:由os_wait函数开始的时间间隔,其间隔时间可由定时节拍数确定。带有INTERVAL值调用os_wait函数的任务将被挂起,直到间隔时间结束,然后返回到READY状态,并可被再次执行。与TIMEOUT不同的是,任务的节拍计数器不复位。
2.3 调度规则
RTX51 TINY使用8051内部定时器T0来产生定时节拍,各任务只在各自分配的定时节拍数(时间片)内执行。当时间片用完后,切换至下一任务运行,因此,各任务是并发执行的。
调度规则如下:如果
,且特定事件还没有发生,②任务执行比循环切换所规定的时间长,则运行任务被中断;如果①没有其它任务正在运行,②任务处于“READY”或“TIMEOUT”状态下等待运行,则另一个任务开始。
2.4 任务控制块
为了能描述和控制任务的运行,内核为每个任务定义了称作任务控制块的数据结构,主要包括三项内容:
①ENTRY[task_id]:task_id任务的代码入口地址,位于CODE空间,2字节为一个单位。
②STKP[taskid]:taskid任务所使用堆栈栈底位置,
2.2 同步机制
为了能保证任务在执行次序上的协调,必须采用同步机制。内核用以下事件进行任务间的通信和同步。
①SIGNAL:用于任务之间通信的位,可以用系统函数置位或清除。如果一个任务调用os_wait函数等待SIGNAL而SIGNAL未置位,则该任务被挂起直到SIGNAL置位,才返回到READY状态,并可被再次执行。
②TIMEOUT:由os_wait函数开始的时间延时,其持续时间可由定时节拍数确定。带 有TIMEOUT值调用os_wait函数的任务将被挂起,直到延时结束,才返回到READY状态,并可被再次执行。
③INTERVAL:由os_wait函数开始的时间间隔,其间隔时间可由定时节拍数确定。带有INTERVAL值调用os_wait函数的任务将被挂起,直到间隔时间结束,然后返回到READY状态,并可被再次执行。与TIMEOUT不同的是,任务的节拍计数器不复位。
2.3 调度规则
RTX51 TINY使用8051内部定时器T0来产生定时节拍,各任务只在各自分配的定时节拍数(时间片)内执行。当时间片用完后,切换至下一任务运行,因此,各任务是并发执行的。
调度规则如下:如果
,且特定事件还没有发生,②任务执行比循环切换所规定的时间长,则运行任务被中断;如果①没有其它任务正在运行,②任务处于“READY”或“TIMEOUT”状态下等待运行,则另一个任务开始。
2.4 任务控制块
为了能描述和控制任务的运行,内核为每个任务定义了称作任务控制块的数据结构,主要包括三项内容:
①ENTRY[task_id]:task_id任务的代码入口地址,位于CODE空间,2字节为一个单位。
②STKP[taskid]:taskid任务所使用堆栈栈底位置,
 位于IDATA空间,1字节为一个单位。
③STATE[taskid].time和STATE[tasked].state:前者表示任务的定时节折计数器,在每一次定时节拍中断后都自减一次;后者表示任务状态寄存器,用其各个位来表示任务所处的状态。位于IDATA空间,以2字节为一单位。
2.5 存储器管理
内核使用了KEIL C51编译器的对全局变量和局部变量采取静态分配存储空间的策略,因此存储器管理简化为堆栈管理。内核为每个任务都保留一个单独的堆栈区,全部堆栈管理都在IDATA空间进行。为了给当前正在运行的任务分配尽可能大的栈区,所以各个任务所用的堆栈位置是动态的,并用STKP[taskid]来记录各任务所用的堆栈位置是动态的,并用STKP[taskid]来记录和任务堆栈栈底位置。当堆栈自由空间小于FREESTACK(默认为20)个字节时,就会调用宏STACK_ERROR,进行堆栈出错处理。
在以下情况会进行堆栈管理:
*任务切换,将全部自由堆栈空间分配正在运行的任务;
*任务创建,将自由堆栈空间的2个字节,分配给新创新的任务task_id,并将ENTRY[task_id],放入其堆栈;
*任务删除,回收被删除的任务task_id的堆栈空间,并转换为自由堆栈空间。
堆栈管理如图2所示。
3 代码分析
内核代码用汇编语言写成,可读性差,但代码效率较高,主要由两个源程序文件conf_tny.a51和rtxtny.a51组成。前者是一个配置文件,用来定义系统运行所需要的全局变量和堆栈出错的宏STACK_ERROR,这些全变量和宏,用户都可以根据自己的系统配置灵活修改;后者是系统内核,完成系统调用的所有函数。
3.1 主程序main
主程序main的主要任务是初始化各任务堆栈栈底指针STKP、状态字STATE和定时器T0,创建任务0并将其导入运行队列。这个过程加上KEIL C51的启动代码CSTARTUP正是一般嵌入式系统中BSP所作的工作。
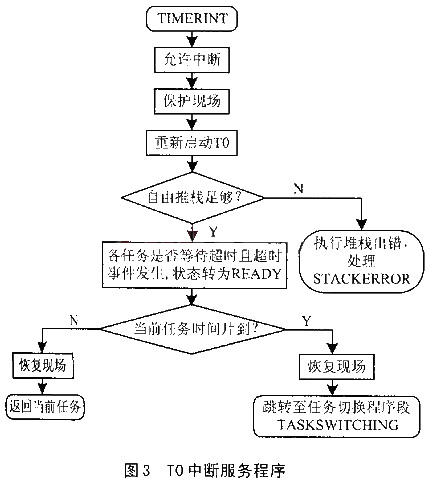
3.2 定时器T0中断服务程序
内核使用定时器T0作为定时节拍发生器,是任务切换、时间片轮转的依据。中断服务程序有三个任务。
①更新各个任务节拍数:将STATE[taskid].timer减1,如果某任务超时(STATE[taskid].timer=0),并且该任务正在等待超时事件,
位于IDATA空间,1字节为一个单位。
③STATE[taskid].time和STATE[tasked].state:前者表示任务的定时节折计数器,在每一次定时节拍中断后都自减一次;后者表示任务状态寄存器,用其各个位来表示任务所处的状态。位于IDATA空间,以2字节为一单位。
2.5 存储器管理
内核使用了KEIL C51编译器的对全局变量和局部变量采取静态分配存储空间的策略,因此存储器管理简化为堆栈管理。内核为每个任务都保留一个单独的堆栈区,全部堆栈管理都在IDATA空间进行。为了给当前正在运行的任务分配尽可能大的栈区,所以各个任务所用的堆栈位置是动态的,并用STKP[taskid]来记录各任务所用的堆栈位置是动态的,并用STKP[taskid]来记录和任务堆栈栈底位置。当堆栈自由空间小于FREESTACK(默认为20)个字节时,就会调用宏STACK_ERROR,进行堆栈出错处理。
在以下情况会进行堆栈管理:
*任务切换,将全部自由堆栈空间分配正在运行的任务;
*任务创建,将自由堆栈空间的2个字节,分配给新创新的任务task_id,并将ENTRY[task_id],放入其堆栈;
*任务删除,回收被删除的任务task_id的堆栈空间,并转换为自由堆栈空间。
堆栈管理如图2所示。
3 代码分析
内核代码用汇编语言写成,可读性差,但代码效率较高,主要由两个源程序文件conf_tny.a51和rtxtny.a51组成。前者是一个配置文件,用来定义系统运行所需要的全局变量和堆栈出错的宏STACK_ERROR,这些全变量和宏,用户都可以根据自己的系统配置灵活修改;后者是系统内核,完成系统调用的所有函数。
3.1 主程序main
主程序main的主要任务是初始化各任务堆栈栈底指针STKP、状态字STATE和定时器T0,创建任务0并将其导入运行队列。这个过程加上KEIL C51的启动代码CSTARTUP正是一般嵌入式系统中BSP所作的工作。
3.2 定时器T0中断服务程序
内核使用定时器T0作为定时节拍发生器,是任务切换、时间片轮转的依据。中断服务程序有三个任务。
①更新各个任务节拍数:将STATE[taskid].timer减1,如果某任务超时(STATE[taskid].timer=0),并且该任务正在等待超时事件,
 则将该任务置为“READY”状态,使其返回任务队列。
②检查自由堆栈空间:若自由堆栈空间范围小于FREESTACK(默认为20字节)时,可以调用宏STACK_ERROR,进行堆栈出错处理。
③检查当前任务(处于RUNNING状态)的时间片是否到时。若当前任务的时间片到时,将程序转到任务切换程序段(taskswitching)切换下一任务运行。
程序流程如图3所示。
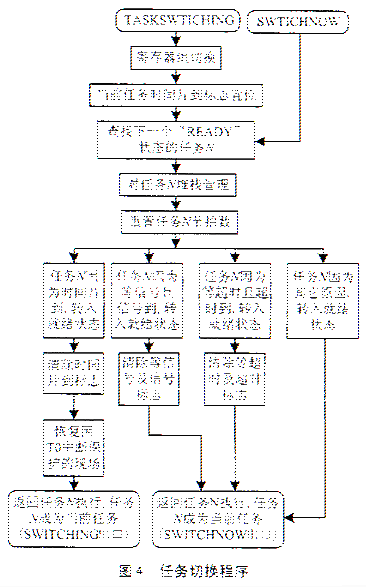
3.3 任务切换程序段
这个程序段是整个内核中最核心的一们,主要功能是完成任务切换。它共有两个入口TASKSWITCHING和SWITCHINGNOW。前者供定时器T0的中断服务程序调用,后能供系统函数os_delete和os_wait调用。相应也有两个不同的出口。
其基本工作流程是首先将当前任务置为“TIME OUT”状态,等待下一次时间片循环,其次找到下一个处于“READY”状态的任务并使其成为当前任务。然后进行堆栈管理,将自由堆栈空间分配给该任务。清除使该任务进入“READY”或“TIMEOUT”状态的相关位后,执行该任务。流程框图如图4所示。
3.4 os_wait程序段
主要完成os_wait函数。任务调用os_wait函数,挂起当前任务,等待一个或几个间隔(K_IVL)、超时(K_TMO)、信号(K_SIG)事件。如果所等待的事件已经发生,继续执行当前任务;如果所等待的事件没有发生,则置相应的等待标志后,挂起该任务,转任务切换程序段(switchingnow)切换到下一任务。
3.5 其它程序段
其它程序段主要完成os_create_task、os_delete_task函数和有关信号处理的os_send_signal、isr_send_signal、os_clear_signal函数。这些函数功能相对比较简单,主要是根据上述存储器管理策略进行堆栈的分配和删除,并改变任务字STATE[tasked].state,使任务处于不同的状态。
以上所有程序段,若涉及到任务状态字操作,必须关中断,以防止和定时器T0同时操作任务状态字。
结语
以上分析可以看到这个内核简洁高效,非常适合于运行在资源较少的单片机上。根据其设计思想,我们也很容易把它移植到其它单片机上。但是它也有缺陷,例如:不支持外部任务切换;不支持用户使用定时器T0等。这些缺陷的存在,限制了任务切换的灵活性。
则将该任务置为“READY”状态,使其返回任务队列。
②检查自由堆栈空间:若自由堆栈空间范围小于FREESTACK(默认为20字节)时,可以调用宏STACK_ERROR,进行堆栈出错处理。
③检查当前任务(处于RUNNING状态)的时间片是否到时。若当前任务的时间片到时,将程序转到任务切换程序段(taskswitching)切换下一任务运行。
程序流程如图3所示。
3.3 任务切换程序段
这个程序段是整个内核中最核心的一们,主要功能是完成任务切换。它共有两个入口TASKSWITCHING和SWITCHINGNOW。前者供定时器T0的中断服务程序调用,后能供系统函数os_delete和os_wait调用。相应也有两个不同的出口。
其基本工作流程是首先将当前任务置为“TIME OUT”状态,等待下一次时间片循环,其次找到下一个处于“READY”状态的任务并使其成为当前任务。然后进行堆栈管理,将自由堆栈空间分配给该任务。清除使该任务进入“READY”或“TIMEOUT”状态的相关位后,执行该任务。流程框图如图4所示。
3.4 os_wait程序段
主要完成os_wait函数。任务调用os_wait函数,挂起当前任务,等待一个或几个间隔(K_IVL)、超时(K_TMO)、信号(K_SIG)事件。如果所等待的事件已经发生,继续执行当前任务;如果所等待的事件没有发生,则置相应的等待标志后,挂起该任务,转任务切换程序段(switchingnow)切换到下一任务。
3.5 其它程序段
其它程序段主要完成os_create_task、os_delete_task函数和有关信号处理的os_send_signal、isr_send_signal、os_clear_signal函数。这些函数功能相对比较简单,主要是根据上述存储器管理策略进行堆栈的分配和删除,并改变任务字STATE[tasked].state,使任务处于不同的状态。
以上所有程序段,若涉及到任务状态字操作,必须关中断,以防止和定时器T0同时操作任务状态字。
结语
以上分析可以看到这个内核简洁高效,非常适合于运行在资源较少的单片机上。根据其设计思想,我们也很容易把它移植到其它单片机上。但是它也有缺陷,例如:不支持外部任务切换;不支持用户使用定时器T0等。这些缺陷的存在,限制了任务切换的灵活性。
引用地址:KEIL RTX51 TINY内核的分析与应用
以系统函数调用的方式运行,因此可以很容易地使用KEIL C51语言编写和编译一个多任务程序,并嵌入到实际应用系统中。内核提供以下函数供应用程序引用:
①char os_create_task(task_id);
②char os_delete_task(task_id);
③char os_send_signal(task_id);
④char isr_send_signal(task_id);
⑤char os_clear_signal(task_id);
⑥char os_running_task_id(void);
⑦char os_wait(event_sel,ticks,dummy)。
各函数的函数原型和具体意义。
2 RTX51 TINY内核分析
2.1 任务状态
RTX51 TINY的用户任务具有以下几个状态。
*RUNNING:任务处于运行中,同一时间只有一个任务可以处于“RUNNING”状态。
*READY:任务正在等待运行,在当前运行的任务时间片完成之后,RTX51 TINY运行下一个处于“READY”状态的任务。
*WAITING:任务等待一个事件。如果所等待的事件发生的话,任务进入“READY”状态。
*DELETED:任务不处于执行队列。
*TIME OUT:任务由于时间片用完而处于“TIME OUT”状态,并等待再次运行。该状态写“READY”状态相似,但由于是内部操作过程使一个循环任务被切换而被冠以标记。
图1所示为任务状态转换图。
2.2 同步机制
为了能保证任务在执行次序上的协调,必须采用同步机制。内核用以下事件进行任务间的通信和同步。
①SIGNAL:用于任务之间通信的位,可以用系统函数置位或清除。如果一个任务调用os_wait函数等待SIGNAL而SIGNAL未置位,则该任务被挂起直到SIGNAL置位,才返回到READY状态,并可被再次执行。
②TIMEOUT:由os_wait函数开始的时间延时,其持续时间可由定时节拍数确定。带 有TIMEOUT值调用os_wait函数的任务将被挂起,直到延时结束,才返回到READY状态,并可被再次执行。
③INTERVAL:由os_wait函数开始的时间间隔,其间隔时间可由定时节拍数确定。带有INTERVAL值调用os_wait函数的任务将被挂起,直到间隔时间结束,然后返回到READY状态,并可被再次执行。与TIMEOUT不同的是,任务的节拍计数器不复位。
2.3 调度规则
RTX51 TINY使用8051内部定时器T0来产生定时节拍,各任务只在各自分配的定时节拍数(时间片)内执行。当时间片用完后,切换至下一任务运行,因此,各任务是并发执行的。
调度规则如下:如果
,且特定事件还没有发生,②任务执行比循环切换所规定的时间长,则运行任务被中断;如果①没有其它任务正在运行,②任务处于“READY”或“TIMEOUT”状态下等待运行,则另一个任务开始。
2.4 任务控制块
为了能描述和控制任务的运行,内核为每个任务定义了称作任务控制块的数据结构,主要包括三项内容:
①ENTRY[task_id]:task_id任务的代码入口地址,位于CODE空间,2字节为一个单位。
②STKP[taskid]:taskid任务所使用堆栈栈底位置,
位于IDATA空间,1字节为一个单位。
③STATE[taskid].time和STATE[tasked].state:前者表示任务的定时节折计数器,在每一次定时节拍中断后都自减一次;后者表示任务状态寄存器,用其各个位来表示任务所处的状态。位于IDATA空间,以2字节为一单位。
2.5 存储器管理
内核使用了KEIL C51编译器的对全局变量和局部变量采取静态分配存储空间的策略,因此存储器管理简化为堆栈管理。内核为每个任务都保留一个单独的堆栈区,全部堆栈管理都在IDATA空间进行。为了给当前正在运行的任务分配尽可能大的栈区,所以各个任务所用的堆栈位置是动态的,并用STKP[taskid]来记录各任务所用的堆栈位置是动态的,并用STKP[taskid]来记录和任务堆栈栈底位置。当堆栈自由空间小于FREESTACK(默认为20)个字节时,就会调用宏STACK_ERROR,进行堆栈出错处理。
在以下情况会进行堆栈管理:
*任务切换,将全部自由堆栈空间分配正在运行的任务;
*任务创建,将自由堆栈空间的2个字节,分配给新创新的任务task_id,并将ENTRY[task_id],放入其堆栈;
*任务删除,回收被删除的任务task_id的堆栈空间,并转换为自由堆栈空间。
堆栈管理如图2所示。
3 代码分析
内核代码用汇编语言写成,可读性差,但代码效率较高,主要由两个源程序文件conf_tny.a51和rtxtny.a51组成。前者是一个配置文件,用来定义系统运行所需要的全局变量和堆栈出错的宏STACK_ERROR,这些全变量和宏,用户都可以根据自己的系统配置灵活修改;后者是系统内核,完成系统调用的所有函数。
3.1 主程序main
主程序main的主要任务是初始化各任务堆栈栈底指针STKP、状态字STATE和定时器T0,创建任务0并将其导入运行队列。这个过程加上KEIL C51的启动代码CSTARTUP正是一般嵌入式系统中BSP所作的工作。
3.2 定时器T0中断服务程序
内核使用定时器T0作为定时节拍发生器,是任务切换、时间片轮转的依据。中断服务程序有三个任务。
①更新各个任务节拍数:将STATE[taskid].timer减1,如果某任务超时(STATE[taskid].timer=0),并且该任务正在等待超时事件,
则将该任务置为“READY”状态,使其返回任务队列。
②检查自由堆栈空间:若自由堆栈空间范围小于FREESTACK(默认为20字节)时,可以调用宏STACK_ERROR,进行堆栈出错处理。
③检查当前任务(处于RUNNING状态)的时间片是否到时。若当前任务的时间片到时,将程序转到任务切换程序段(taskswitching)切换下一任务运行。
程序流程如图3所示。
3.3 任务切换程序段
这个程序段是整个内核中最核心的一们,主要功能是完成任务切换。它共有两个入口TASKSWITCHING和SWITCHINGNOW。前者供定时器T0的中断服务程序调用,后能供系统函数os_delete和os_wait调用。相应也有两个不同的出口。
其基本工作流程是首先将当前任务置为“TIME OUT”状态,等待下一次时间片循环,其次找到下一个处于“READY”状态的任务并使其成为当前任务。然后进行堆栈管理,将自由堆栈空间分配给该任务。清除使该任务进入“READY”或“TIMEOUT”状态的相关位后,执行该任务。流程框图如图4所示。
3.4 os_wait程序段
主要完成os_wait函数。任务调用os_wait函数,挂起当前任务,等待一个或几个间隔(K_IVL)、超时(K_TMO)、信号(K_SIG)事件。如果所等待的事件已经发生,继续执行当前任务;如果所等待的事件没有发生,则置相应的等待标志后,挂起该任务,转任务切换程序段(switchingnow)切换到下一任务。
3.5 其它程序段
其它程序段主要完成os_create_task、os_delete_task函数和有关信号处理的os_send_signal、isr_send_signal、os_clear_signal函数。这些函数功能相对比较简单,主要是根据上述存储器管理策略进行堆栈的分配和删除,并改变任务字STATE[tasked].state,使任务处于不同的状态。
以上所有程序段,若涉及到任务状态字操作,必须关中断,以防止和定时器T0同时操作任务状态字。
结语
以上分析可以看到这个内核简洁高效,非常适合于运行在资源较少的单片机上。根据其设计思想,我们也很容易把它移植到其它单片机上。但是它也有缺陷,例如:不支持外部任务切换;不支持用户使用定时器T0等。这些缺陷的存在,限制了任务切换的灵活性。
上一篇:基于单片机C8051F060的智能功率柜
下一篇:80C51复位标志位的设置与应用研究
- 热门资源推荐
- 热门放大器推荐
 5962-9209401MPA
5962-9209401MPA
小广播
热门活动
换一批
更多

设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章

更多精选电路图






更多热门文章
更多每日新闻
- Allegro MicroSystems 在 2024 年德国慕尼黑电子展上推出先进的磁性和电感式位置感测解决方案
- 左手车钥匙,右手活体检测雷达,UWB上车势在必行!
- 狂飙十年,国产CIS挤上牌桌
- 神盾短刀电池+雷神EM-i超级电混,吉利新能源甩出了两张“王炸”
- 浅谈功能安全之故障(fault),错误(error),失效(failure)
- 智能汽车2.0周期,这几大核心产业链迎来重大机会!
- 美日研发新型电池,宁德时代面临挑战?中国新能源电池产业如何应对?
- Rambus推出业界首款HBM 4控制器IP:背后有哪些技术细节?
- 村田推出高精度汽车用6轴惯性传感器
- 福特获得预充电报警专利 有助于节约成本和应对紧急情况
更多往期活动
- 3小时实战+剖析:TI工程师手把手带你全面入门MSP430(限量售$4.3开发套件,助你参与动手实验)
- 了解PI InnoSwitch-CE,答题赢好礼
- 下载有礼|是德科技电子书 《通过了解测试精度的基础知识, 提高良率并降低风险》,不做“差不多先生”
- 【抢楼有奖】聊聊对光电子的认识!
- 【EE团】抢先体验 ST最新STM32F0308-DISCOVERY开发工具!
- EEworld独家原创视频:大话TI CC2650,邀你来看!
- 安全的革新,全新的验证方式 下载富士通 《频谱验证解决方案 》白皮书 好礼送!
- KOL实战分享|无刷直流电机(BLDC)的驱动及控制方法
- TI带你一起解剖共享单车智能锁!看视频涨知识赢好礼喽!
- TE户外照明互连解决方案样片来袭 免费申领进行中!
11月17日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号