1。逻辑结构
初始化各外设(RCC,GPIO,SPI,NVIC,I2C,LCD)——检测MEMS并显示检测状态——在死循环中不断查询加速度值并描画。
2。硬件原理
与该程序相关的硬件连接图:
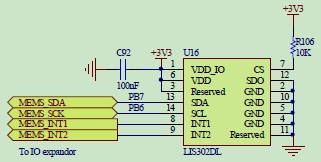
MEMS连接图

MEMS引出脚与MCU(左)、IO扩展(右下)连接图

LCD连接图

LCD引出脚与MCU(左)、IO扩展(右上)连接图
从图中可以看出,MEMS使用I2C接口SCL和SDA连接MCU;LCD使用SPI3接口连接MCU。两者的其余引出脚(INT1, 2, TouchScreenXY+-)均连接到IO扩展。IO扩展部分的原理图为:

它由两块touchScreen控制芯片组成,同样挂在I2C总线上。该部分的原理还没弄清,代码中怎么控制这两块芯片的动作,MEMS INT1,2连接扩展口的意义何在,是如何作用的,有待进一步研究。
MEMS控制原理
在程序动作前,需要初始化系统中断向量表(使用NVIC_SetVectorTable函数),配置系统时钟、使能各外设时钟(SystemInit,RCC_APB2PeriphClockCmd,RCC_APB1PeriphClockCmd)。
1。GPIO
PB6,PB7分别作为SCL和SDA。查找STM32芯片手册的AFIO部分,

将PB6,PB7作为SCL和SDA使用不需要进行重映射,因此只需初始化其模式、速度。
2。I2C
(1)外设时钟频率
外设时钟频率fPCLK1需写入CR2寄存器的最低六位,写入值的单位为MHz。因此,把RCC中PCLK1的频率值除以1000,000后,放入CR2中。
(2)CCR (clock control register)
该值控制master模式下的I2C时钟。
I2C传输分为standard mode (fSCL = 100kHz) 和fast mode (fSCL = 400kHz)。fast mode分为 tlow/thigh = 2 和 tlow/thigh = 16/9 两种。图示如下。16/9类同。

CCR值的公式为:
standard mode:
Thigh = CCR * TPCLK1
Tlow = CCR * TPCLK1
fast mode:
比例为2:
Thigh = CCR * TPCLK1
Tlow = 2 * CCR * TPCLK1
比例为16/9:
Thigh = 9 * CCR * TPCLK1
Tlow = 16 * CCR * TPCLK1
因此,计算CCR值的方法为:
standard mode:
CCR = Thigh / TPCLK1 = 0.5 * TSCL / TPCLK1 = fPCLK1 / (2 * fSCL)
(代码中结构体的变量I2C_ClockSpeed即为fSCL)
fast mode:
比例为2:
CCR = Thigh / TPCLK1 = (1 / 3) * TSCL / TPCLK1 = fPCLK1 / (3 * fSCL)
比例为16/9:
CCR = fPCLK1 / (25 * fSCL)
在CCR中,standard mode下最小值为0x04,fast mode下为0x01。
(3)TRISE寄存器
该值设定master模式下的最大上升时间。计算方法为允许的最大SCL上升时间除以TPCLK1,所得商值加1。
在I2C bus specification中,standard mode 下最大时间为1000ns,fast mode下为300ns。
因此,TRISE计算方法为:
standard mode:
TRISE = 1000 * (10^(-9)) / TPCLK1 + 1 = fPCLK1 + 1
fast mode:
TRISE = 300 * (10^(-9)) / TPCLK1 + 1 = 300 * fPCLK1 / 1000 + 1
3。读取MEMS中加速度数据
实现过程按照LIS302DL datasheet中给的时序

大致步骤为:允许ACK,发送起始位,发送外设写地址,发送命令数据,发送起始位,发送外设读地址,(收到外设数据),禁用ACK,发送停止位,允许ACK,从DR寄存器读数据。
发送和接收命令或地址数据的本质是读写DR寄存器。
每步执行之后需要检查SR1和SR2相应寄存器的状态,确认该步执行完成后才能进行下一步。
对于外设读写地址,LIS302DL datasheet中有说明:当SDO接地时,外设地址SAD为00111010;master要发送的地址数据位SAD+W/R,W/R位,从MEMS读数据时为1,向MEMS写数据时为0。
在发送外设写地址后,对MEMS的操作为:通过I2C写入MEMS寄存器的地址,(通过I2C写入对该寄存器的控制字)。
在发送外设读地址后,对MEMS的操作为:关闭ACK,发送停止位,从DR读取数据。
程序中用到的MEMS寄存器有:0x20 CTRL_REG1,选择电源模式,选择加速度检测方向
0x27 STATUS_REG,各轴数据获取和溢出状况
0x29, 2B, 2D OUT_X,Y,Z 各轴输出数据。
剩余问题:在I2C驱动中,对于外设时钟频率的赋值,汇编代码中,MCU寄存器中为正确的值,但单步时发现,赋值给时钟频率变量的值显示不正确,无法赋给正确的值;最后计算结果为寄存器中数据的计算,因此是正确的。
若把变量声明为static,汇编代码中该变量的存储位置发生变化。需要学习code, RO data, RW data和ZI data的职能。
中断
设定某方向的加速度阈值,当传感器测量值超过该阈值时,传感器输出中断信号。信号通过IO扩展芯片的中断管脚与MCU的GPIO相连,进而能在传感器超过阈值时,系统进入ISR。
程序初始化时需要进行的与中断有关的设定如下,设定都是通过对寄存器的改写实现的:
MEMS:
设定输出给IO扩展芯片管脚的中断的高/低电平有效
设定中断为非锁存模式。(锁存模式即中断信号需要在读取某个寄存器后才能清除)
设定中断的方向和阈值。
IO扩展芯片:
设定输出给MCU IO口的中断的高/低电平有效,及level/pulse方式
使能全局中断功能
使能芯片GPIO的中断功能
使能绑定某些管脚的中断功能
清除当前中断寄存器各位状态
MCU:
配置与IO扩展芯片中断管脚连接的GPIO的参数
将该GPIO与相应EXTI绑定
设定EXTI相应线的使能,上升下降沿触发
设定NVIC优先级和使能
中断发生,ISR执行完成后需要进行的释放操作如下:
IO扩展芯片:
清除GPIO中断的挂起状态
清除GPIO具体管脚中断的挂起状态
清除边缘检测、上升下降沿检测状态
MCU:
清除相应EXTI线上的挂起状态
上一篇:解决:keil报错invalid redeclaration of type name "s32"
下一篇:tm32关于BOOT0和BOOT1
推荐阅读最新更新时间:2024-03-16 15:02

 机器人学 (蔡自兴)
机器人学 (蔡自兴) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题












 京公网安备 11010802033920号
京公网安备 11010802033920号