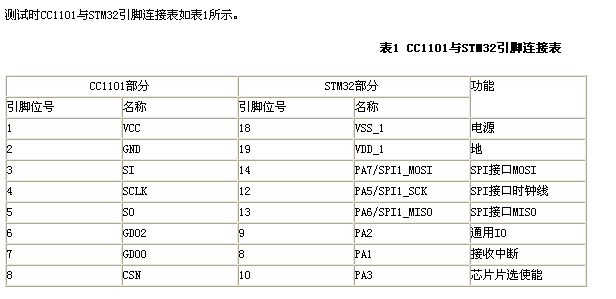
移植原来TI对于CC1101与MSP430接口库到STM32平台,参考原TI库应用笔记“ MSP430 Interface to
CC1100/2500 Code Library”,做到尽量保持所有函数名不改变,以方便以前基于MSP430的程序向STM32移植。
【要求】
1.编程要求:改写原来基于MSP430的程序,使用于STM32,尽量保持所有函数名不改变,以方便以前基于MSP430的程序向STM32移植。
2.实现功能:STM32与CC1101通过SPI接口正常传输数据,不同节点的CC1101可以正常传输数据。
3.实验现象:STM32与CC1101连接后,可以与另一个节点通信,节点初始在随机时间发送一个数据,任一节点收到数据后LED闪一下,并把数据回传,如此循环,会看到LED不停闪烁。
【硬件电路】
【原理】
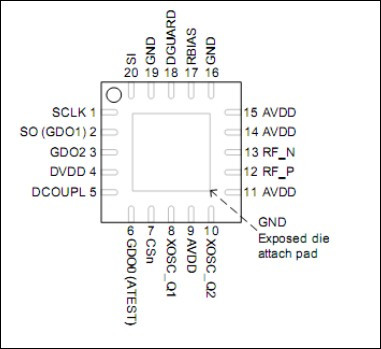
CC1101是TI公司一款高性价比的单片UHF收发器,为低功耗无线电应用而设计。它是CC1100器件的加强升级版,灵敏度更高,功耗更小,带宽更大。CC1101可满足多个领域中的低功耗无线应用要求,如警报与安全、自动抄表、工业监控以及家庭和楼宇自动化等。CC1101理想适用于工业、科学及医药设备(ISM)以及316、433、868及916MHz短距装置(SRD)频带。但是,该器件也可方便编程,以支持其它频率,如300-348MHz、387-467MHz及779-928MHz等。出色的频带与调制格式支持使其能与目前的RF终端设备相兼容。
图1 CC1101 的外引脚图(俯视)
CC1100通过4线SPI兼容接口 (SI,SO,SCLK和 CSn)配置。这个接口同时用作写和读缓存数据。SPI
接口上所有的处理都同一个包含一个读/写位,一个突发访问位和一个 6 位地址的头字节一起作用。在地址和数据转换期间, CSn 脚
(芯片选择,低电平有效)必须保持为低电平。如果在过程中 CSn 变为高电平,则转换取消。当 CSn 变低, 在开始转换头字节之前,
MCU必须等待,直到 SO脚变低。这表明电压调制器已经稳定,晶体正在运作中。除非芯片处在 SLEEP 或 XOFF 状态,SO 脚在
CSn变低之后总会立即变低。关于CC1101对配置寄存器写和读操作如图2所示。
芯片状态位
当头字节在 SPI 接口上被写入时,芯片状态字节在 SO 脚上被 CC1100 写入。状态字节包含关键状态信号,对MCU是有用的。第一位
s7,是CHIP_RDYn 信号。在 SCLK的在第一个正边缘之前,这个信号必须变低。CHIP_RDYn
信号表明晶体正处于工作中,调节数字供给电压是稳定的。6,5 和4 位由状态值组成。这个值反映了芯片的状态。 当使 XOSC
空闲并使数字中心的能量开启,所有其他模块处于低功耗状态时。只有芯片处于此状态时,频率和信道配置才能被更新。当芯片处于接收模式时,
RX状态是活动的。同样地,当芯片处于发送模式时,TX状态是活动的。状态字节中的后四位( 3
:0)包含FIFO_BYTES_AVAILABLE。为了进行读操作,这个区域包含可从 RX FIFO
读取的字节数。为了进行写操作,这个区域包含可写入 TX FIFO 的 字节数。
寄存器访问
CC1100配置寄存器位于SPI地址从0x00到0x2F之间。所有的配置寄存器均能读和写。当对寄存器写时,每当一个待写入的数据字节传输到
SI脚时,状态字节将被送至 SO脚。
通过在地址头设置突发位,连续地址的寄存器能高效地被访问。这个地址在内部计数器内设置起始地址。每增加一个新的字节计数器值增加 1。
突发访问,不管是读访问还是写访问,必须通过设置CSn 为高来终止。对 0x30-0x3D间的地址来说,
突发位用以在状态寄存器和命令滤波之间选择。状态寄存器只读。突发读取对状态寄存器是不可取的,故它们每次只能被读一个。
命令滤波
命令滤波可被视为 CC1100
的单字节指令。通过命令滤波寄存器的选址,内部序列被启动。这些命令用来关闭晶体振荡器,开启传输模式和电磁波激活等。命令滤波寄存器的访问和一个寄存器的写操作一样,但没有数据被传输。就是说,只
有 R/W 位(置为 0) ,突发访问(置为 0)和六个地址位(0x30和0x3D之间)被写。一个命令滤波可能在任何其他 SPI
访问之后,而不需要将 CSn 拉至高电平。命令滤波立即被执行,当 CSn 高时 SPWD和 SXOFF滤波是例外。
FIFO访问
64 字节 TX FIFO 和 64 字节 RX FIFO 通过0x3F 被访问。当读/写位为 0 时,TX FIFO被访问,当读/写位为 1
时,RX FIFO 被访问。 TX FIFO是只写的,而 RX FIFO是只读的。突发位用来决定 FIFO
访问是单字节还是突发访问。单字节访问方式期望地址的突发位为 0 及1
数据字节。在数据字节之后等待一个新的地址,因此,CSn继续保持低。突发访问方式允许一地址字节,然后是连续的数据字节,直到通过设置 CSn
为高来关断访问。 当对 TX FIFO写时,状态字节对每个 SO脚上的新数据字节是输出量,如图 6 所示。这个状态位能用来侦测对 TX FIFO
写数据时的下溢。注意,状态字节包含在写入字节到 TX FIFO 的过程前空闲的字节数。当最后一个适合 TX FIFO的字节被传送至 SI 脚后, 被
SO脚接收的状态位会表明在 TX FIFO中只有一个字节是空闲的。
传输 FIFO 可能会通过发布一个 SFTX 命令滤波而被淹没。相似地,一个 SFRX命令滤波会淹没接收 FIFO。当进入休眠状态时, 两个
FIFO都被清空。PATABLE 访问
0x3E 地址用来访问 PATABLE。PATABLE用来选择 PA 能量控制设置。在接收此地址之后,SPI 等待至少 8
个字节。通过控制PATABLE,能实现可控的 PA能量上升和下降,减少的带宽的 ASK 调制整型也如此PATABLE 是一个 8 字节表, 定义了
PA控制 设置, 为 8 个 PA 功率值(由FRENDO.PA_POWER 的 3
个位的值所选择)的每一个所使用。这个表从最低位到最高位可读和写,一此一位。一个索引计数器用来控制对这个表的访问。每读出或写入表中的一个字节,计数器就加
1。当 CSn 为高时,计数值置为最小值。当达到最大值时,计数器由零重新开始计数。
PATABLE 访问
对 PATABLE
的访问是单字节或者突发访问,由突发位决定。当使用突发访问时,索引计数器的值增加;达到7时重新从0开始。读/写位控制访问是写访问(R/W=0)或者读访问(R/W=1)。
如果一字节被写入 PATABLE,且这个值将要被读出,那么,为了设置索引计数器的值重为 0,CSn必须在读访问之前置为高。 注意,当 PATABLE
进入休眠状态时,所存储的内容会丢失,特别是第一个字节。
图2 配置寄存器写和读操作
STM32的串行外设接口(SPI)
STM32的串行外设接口(SPI)有如下特性:
● 3线全双工同步传输
● 带或不带第三根双向数据线的双线单工同步传输
● 8或16位传输帧格式选择
● 主或从操作
● 支持多主模式
● 8个主模式波特率预分频系数(最大为fPCLK/2)
● 从模式频率 (最大为fPCLK/2)
● 主模式和从模式的快速通信
● 主模式和从模式下均可以由软件或硬件进行NSS管理:主/从操作模式的动态改变
● 可编程的时钟极性和相位
● 可编程的数据顺序,MSB在前或LSB在前
● 可触发中断的专用发送和接收标志
● SPI总线忙状态标志
● 支持可靠通信的硬件CRC
─ 在发送模式下,CRC值可以被作为最后一个字节发送
─ 在全双工模式中对接收到的最后一个字节自动进行CRC校验
● 可触发中断的主模式故障、过载以及CRC错误标志
● 支持DMA功能的1字节发送和接收缓冲器:产生发送和接受请求
通常SPI通过4个引脚与外部器件相连: MISO:主设备输入/从设备输出引脚。该引脚在从模式下发送数据,在主模式下接收数据。
MOSI:主设备输出/从设备输入引脚。该引脚在主模式下发送数据,在从模式下接收数据。 SCK:串口时钟,作为主设备的输出,从设备的输入
NSS:从设备选择。这是一个可选的引脚,用来选择主/从设备。它的功能是用来作为“片
选引脚”,本实验中没有使用。SPI的方框图如图3所示。
图3 SPI内部框图
图4 数据帧格式图
【实验步骤】
1.学习STM32串行外设接口(SPI)相关知识,熟悉所调用的库函数,学习CC1101相关知识,熟悉CC1101的配置方法,研究TI关于CC1101与MSP430的接口程序库,熟悉库的实现方法。
2.连接电路。
3.编写程序,借助逻辑分析仪工具,调试程序。
【程序代码结构】
所有与CC1101相关的代码均放于CCxxxx文件夹,源文件用途分类说明如表2所示。对于应用分层框图如图5所示。因为程序较大,仅把与硬件相关、改动较大的TI_CC_spi.c放在附录中。
表2 源文件用途分类说明
类型文件名功能
硬件定义文件TI_CC_CC1100-CC2500.h对CC1101内部寄存器的定义
TI_CC_STM32.h对使用的STM32相关SPI引脚进行定义
TI_CC_hardware_board.h对使用的STM32通用数据引脚进行定义
SPI接口文件TI_CC_spi.c通过SPI访问CC1101寄存器的功能实现文件。
TI_CC_spi.h对TI_CC_spi.c的函数进行声明
与应用层接口文件CC1100-CC2500.c对CC1101的使用的功能文件,包括初始化、发送数据包、接收数据包
CC1100-CC2500.h对CC1100-CC2500.c的函数进行声明
include.h高层包含文件,包含所有.h文件
应用层
CC1100-CC2500.c
TI_CC_spi.c
TI_CC_hardware_board.h
TI_CC_STM32.h
TI_CC_CC1100-CC2500.h
TI_CC_STM32.h
SPI应用
硬件定义
main.c
图5 库文件程序分层框图
【实验总结】
CC1101是在上升沿读入数据,即上升沿有效,一般时钟线默认是高电平,配置此功能的寄存器时CPOL(时钟极性
)和CPHA(时钟相位)当CPOL=0时,空闲状态时,SCK保持低电平,CPOL=1时,空闲状态时,SCK保持高电平。CPHA
=0时数据采样从第一个时钟边沿开始,CPHA =1时数据采样从第二个时钟边沿开始。在CC1101的配置中,这两个控制配置为CPOL=1,CPHA
=1。
在改写原来TI的程序时,为了保持好的移植性,因此对所有的函数名均未做改变,文件名也尽量不改变,仅将TI_CC_MSP430.h改为TI_CC_STM32.h,当然因为是应用于两种截然不同的MCU,所以与硬件相关的宏定义有较大改变。
STM32与CC1101的通信的逻辑分析仪截图如图6-图8所示,其中图6是启动CC1101时的逻辑波形,图7是写配置寄存器时的逻辑波形,图8读寄存器时的逻辑波形。
6 启动CC1101时的逻辑波形
图 写配置寄存器时的逻辑波形
图8 读寄存器时的逻辑波形
附录:
////////////////////////////////////////////////////////////////////////////////
// 文件名: TI_CC_spi.c
// 工作环境: IAR for ARM 5.41 Kickstart,基于STM32F103ZE-EK
// 作者: 程家阳
// 生成日期: 2010.03.15
// 功能: STM32与CCxxxx进行通信的SPI底层函数,完成初始化STM32的SPI口用于连接
// CCxxxx,读写CCxxxx寄存器。
//注意:
//
//
// 相关文件:
// 修改日志:
////////////////////////////////////////////////////////////////////////////////
#include "include.h"
#include "TI_CC_spi.h"
////////////////////////////////////////////////////////////////////////////////
// 程序名 : void TI_CC_Wait(unsigned int cycles)
// 作用 : 延时
// 输入参数:无
// 输出参数:无
// 说明: uS级延时
//
////////////////////////////////////////////////////////////////////////////////
void TI_CC_Wait(unsigned int cycles)
{
while(cycles>15) // 15 cycles consumed by overhead
cycles = cycles - 6; // 6 cycles consumed each iteration
}
////////////////////////////////////////////////////////////////////////////////
// 程序名 : void TI_CC_SPISetup(void)
// 作用 : 初始化配置SPI
// 输入参数:无
// 输出参数:无
// 说明:
//
////////////////////////////////////////////////////////////////////////////////
void TI_CC_SPISetup(void)
{
SPI_InitTypeDef SPI_SST_Init_Structure;//定义SPI配置结构体
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_SET);//CS disable
RCC_APB2PeriphClockCmd( RCC_APB2Periph_SPI1 ,ENABLE);//时钟使能
//配置为双线双工模式
SPI_SST_Init_Structure.SPI_Direction=SPI_Direction_2Lines_FullDuplex;
//主器件
SPI_SST_Init_Structure.SPI_Mode=SPI_Mode_Master;
//8bit数据帧
SPI_SST_Init_Structure.SPI_DataSize=SPI_DataSize_8b;
//时钟线默认高
SPI_SST_Init_Structure.SPI_CPOL=SPI_CPOL_High ;
//数据捕获于第二个时钟沿,这两个其实配置了时钟极性和相位
SPI_SST_Init_Structure.SPI_CPHA=SPI_CPHA_2Edge;
//NSS模式选择
SPI_SST_Init_Structure.SPI_NSS=SPI_NSS_Soft;
//波特率预分频值为 64
SPI_SST_Init_Structure.SPI_BaudRatePrescaler=SPI_BaudRatePrescaler_64;
//数据传输从 MSB 位开始
SPI_SST_Init_Structure.SPI_FirstBit=SPI_FirstBit_MSB;
SPI_Init(SPI1, &SPI_SST_Init_Structure); //操作
SPI_Cmd(SPI1,ENABLE); //使能
//下面的几句,具体作用不太清楚,需了解
//TI_CC_SPI_USCIA0_PxSEL |= TI_CC_SPI_USCIA0_SIMO | TI_CC_SPI_USCIA0_SOMI
| TI_CC_SPI_USCIA0_UCLK;
// SPI option select
//TI_CC_SPI_USCIA0_PxDIR |= TI_CC_SPI_USCIA0_SIMO | TI_CC_SPI_USCIA0_UCLK;
// SPI TXD out direction
}
////////////////////////////////////////////////////////////////////////////////
// 程序名 : void TI_CC_SPIWriteReg(char addr, char value)
// 作用 : 向一个"addr"指向的寄存器中写入值"value"
// 输入参数:char addr :指向的地址
// char value :要写入的值
// 输出参数:无
// 说明:
//
////////////////////////////////////////////////////////////////////////////////
void TI_CC_SPIWriteReg(char addr, char value)
{
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_RESET); //CS enable
// Wait for CCxxxx ready
while(GPIO_ReadInputDataBit(TI_CC_SPI_USCIA0_GPIO,
TI_CC_SPI_USCIA0_SOMI)!= RESET)
{
;
}
SPI_I2S_SendData(SPI1, (uint16_t)addr);// Send address
// Wait for TX to finish$$
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
SPI_I2S_SendData(SPI1, (uint16_t)value);//发送数据通过SPI1
// Wait for TX to finish
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_SET); // CS disable
}
////////////////////////////////////////////////////////////////////////////////
// 程序名 : void TI_CC_SPIWriteBurstReg(char addr, char *buffer, char count)
// 作用 : 向一个"addr"指向的寄存器中写入值"value"
// 输入参数:char addr :指向的地址
// char value :要写入的值
// 输出参数:无
// 说明:
//
////////////////////////////////////////////////////////////////////////////////
void TI_CC_SPIWriteBurstReg(char addr, char *buffer, char count)
{
unsigned int i;
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_RESET); // /CS enable
// Wait for CCxxxx ready
while(GPIO_ReadInputDataBit(TI_CC_SPI_USCIA0_GPIO,
TI_CC_SPI_USCIA0_SOMI)!= RESET)
{
;
}
// Send address
SPI_I2S_SendData(SPI1, (uint16_t)(addr | TI_CCxxx0_WRITE_BURST));
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
for (i = 0; i < count; i++)
{
// Send data
SPI_I2S_SendData(SPI1, (uint16_t)buffer[i]);//发送数据通过SPI1
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
}
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_SET); //CS disable
}
////////////////////////////////////////////////////////////////////////////////
// 程序名 : char TI_CC_SPIReadReg(char addr)
// 作用 : 从一个单一的配置寄存器中读数,寄存器地址:"addr"
// 输入参数:char addr :指向的地址
// 输出参数:char :返回的寄存器值
// 说明:
//
////////////////////////////////////////////////////////////////////////////////
char TI_CC_SPIReadReg(char addr)
{
char x;
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_RESET); // /CS enable
// Wait for TX to finish
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
// Send address
SPI_I2S_SendData(SPI1, (uint16_t)(addr | TI_CCxxx0_READ_SINGLE));
// Wait for TX to finish
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
//虚拟的接收数据,用来清空接收寄存器
x = SPI_I2S_ReceiveData(SPI1);//接收数据通过SPI1
// Dummy write so we can read data
SPI_I2S_SendData(SPI1, (uint16_t)0xff);
// Address is now being TX'ed, with dummy byte waiting in TXBUF...
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待$$$$
{
;
}
// Dummy byte RX'ed during addr TX now in RXBUF
// Clear flag//这个在stm32中是硬件清除
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
// Data byte RX'ed during dummy byte write is now in RXBUF
x = SPI_I2S_ReceiveData(SPI1);//接收数据通过SPI1
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_SET); // /CS disable
return x;
}
////////////////////////////////////////////////////////////////////////////////
// 程序名 : void TI_CC_SPIReadBurstReg(char addr, char *buffer, char count)
// 作用 : 从多个寄存器中读数,第一个寄存器地址:"addr",读出的数据存放于"buffer"
// 为起始地址的存储空间,总共读"count"个寄存器。
// 输入参数:char addr :指向的地址
// char *buffer:存放的存储空间的起始地址
// char count:要读的寄存器的数量
// 输出参数:无
// 说明:
//
////////////////////////////////////////////////////////////////////////////////
void TI_CC_SPIReadBurstReg(char addr, char *buffer, char count)
{
char i;
char x;
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_RESET); // /CS enable
// Wait for CCxxxx ready
while(GPIO_ReadInputDataBit(TI_CC_SPI_USCIA0_GPIO,
TI_CC_SPI_USCIA0_SOMI)!= RESET)
{
;
}
// Send address
SPI_I2S_SendData(SPI1, (uint16_t)(addr | TI_CCxxx0_READ_BURST));
// Wait for TXBUF ready
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
//虚拟的接收数据,用来清空接收寄存器
x = SPI_I2S_ReceiveData(SPI1);//接收数据通过SPI1
// Dummy write to read 1st data byte
SPI_I2S_SendData(SPI1, (uint16_t)0xff);//发送数据通过SPI1
// Addr byte is now being TX'ed, with dummy byte to follow immediately
after
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
x = SPI_I2S_ReceiveData(SPI1);//接收数据通过SPI1
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
// First data byte now in RXBUF
for (i = 0; i < (count-1); i++)
{
//UCA0TXBUF = 0; //Initiate next data RX, meanwhile.&$$$$$.
SPI_I2S_SendData(SPI1, (uint16_t)0);//发送数据通过SPI1
// Store data from last data RX
buffer[i] = SPI_I2S_ReceiveData(SPI1);//接收数据通过SPI1
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
}
// Store last RX byte in buffer
buffer[count-1]= SPI_I2S_ReceiveData(SPI1);//接收数据通过SPI1
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_SET); // CS disable
}
////////////////////////////////////////////////////////////////////////////////
// 程序名 : char TI_CC_SPIReadStatus(char addr)
// 作用 : 从状态寄存器中读数,寄存器地址:"addr"
// 输入参数:char addr :指向的状态寄存器地址
// 输出参数:char :状态寄存器的值
// 说明:
//
////////////////////////////////////////////////////////////////////////////////
char TI_CC_SPIReadStatus(char addr)
{
char x;
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_RESET); // /CS enable
//Wait for CCxxxx ready
while(GPIO_ReadInputDataBit(TI_CC_SPI_USCIA0_GPIO,
TI_CC_SPI_USCIA0_SOMI)!= RESET)
{
;
}
// Send address
SPI_I2S_SendData(SPI1, (uint16_t)(addr |
TI_CCxxx0_READ_BURST));//发送数据通过SPI1
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
// Dummy write so we can read data
x = SPI_I2S_ReceiveData(SPI1);//接收数据通过SPI1
SPI_I2S_SendData(SPI1, (uint16_t)0xff);//发送数据通过SPI1
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
// Read data
x = SPI_I2S_ReceiveData(SPI1);//接收数据通过SPI1
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_SET); // CS disable
return x;
}
////////////////////////////////////////////////////////////////////////////////
// 程序名 : void TI_CC_SPIStrobe(char strobe)
// 作用 : 向命令寄存器写数,写入的值"strobe"
// 输入参数:char strobe :要写入的值
// 输出参数:无
// 说明:
//
////////////////////////////////////////////////////////////////////////////////
void TI_CC_SPIStrobe(char strobe)
{
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_RESET); //CS enable
// Wait for CCxxxx ready
while(GPIO_ReadInputDataBit(TI_CC_SPI_USCIA0_GPIO,
TI_CC_SPI_USCIA0_SOMI)!= RESET)
{
;
}
// Send strobe
SPI_I2S_SendData(SPI1, (uint16_t)strobe);//发送数据通过SPI1
// Strobe addr is now being TX'ed
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_SET); //CS disable
}
////////////////////////////////////////////////////////////////////////////////
// 程序名 : void TI_CC_PowerupResetCCxxxx(void)
// 作用 : 硬复位CC芯片
// 输入参数:无
// 输出参数:无
// 说明:
//
////////////////////////////////////////////////////////////////////////////////
void TI_CC_PowerupResetCCxxxx(void)
{
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_SET); // CS disable
TI_CC_Wait(30);
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_RESET); //CS enable
TI_CC_Wait(30);
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_SET); //CS disable
TI_CC_Wait(45);
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_RESET); //CS enable
// Wait for CCxxxx ready
while(GPIO_ReadInputDataBit(TI_CC_SPI_USCIA0_GPIO,
TI_CC_SPI_USCIA0_SOMI)!= RESET)
{
;
}
// Send strobe
SPI_I2S_SendData(SPI1, (uint16_t)TI_CCxxx0_SRES);//发送数据通过SPI1
// Strobe addr is now being TX'ed
while(SPI_I2S_GetFlagStatus(SPI1,SPI_I2S_FLAG_BSY )!= RESET)//线路忙则等待
{
;
}
// Wait for CCxxxx ready
while(GPIO_ReadInputDataBit(TI_CC_SPI_USCIA0_GPIO,
TI_CC_SPI_USCIA0_SOMI)!= RESET)
{
;
}
GPIO_WriteBit(TI_CC_CSn_GPIO, TI_CC_CSn_PIN, Bit_SET); //CS disable
}
上一篇:mini2440简单的裸机led流水灯代码
下一篇:ARM7嵌入式系统中Bootloader分析与设计
推荐阅读最新更新时间:2024-03-16 15:02

 基于STM32F411的无刷直流电机FOC控制系统设计
基于STM32F411的无刷直流电机FOC控制系统设计设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题






 京公网安备 11010802033920号
京公网安备 11010802033920号