stm32有个启动引脚Boot0和Boot1,用于设置代码的启动位置
关键字:stm32 启动设置
引用地址:stm32开发板开发笔记(4)-启动设置
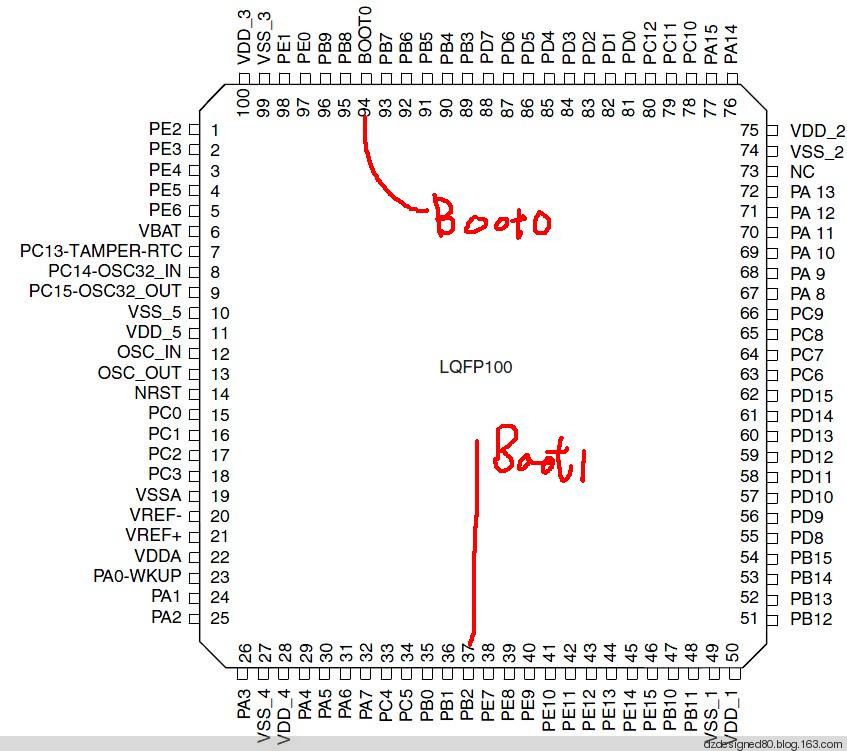
如下图

Boot0位于94脚,是专门的Boot脚,Boot1位于37脚,和PB2复用,
Boot1 Boot0
x 0: boot0为0,boot1为任意值,代码从内部程序存储区启动
0 1:代码从系统存储区启动(ISP代码区)
所以将Boot0对地短路,只需改变Boot1就能改变启动方式。
当前主板上MAX232,所以用USB转串口接上主板,配合Flymcu软件,可以读出和擦除当中的信息,但是烧写中间会出错。
FlyMcu(www.mcuisp.com)
可能是由于延长线的问题或USB转串口的问题,并且发现只有波特率为115200时,主板和烧录软件才能通信,不知道是什么原因,按道理ISP程序应该是自适应的才对。
上一篇:stm32 中断函数名称表
下一篇:stm32 通用定时器中断
推荐阅读最新更新时间:2024-03-16 15:06
关于STM32初学者必知
STM32的核心Cortex-M3处理器是一个标准化的微控制器结构,希望思考一下,何为标准化?简言之,Cortex-M3处理器拥有32位CPU,并行总线结构,嵌套中断量控制单元,调试系统以及标准的存储映射。 嵌套中断向量控制器(Nested Vector Interrupt Controller,简称NVIC)是Cortex-M3处理器中一个比较关键的组件,它为基于Cortex-M3的微控制器提供了标准的断架构和优秀的中断响应能力,为超过240个中断源提供专门的中断入口,而且可以赋予每个中断源单独的优先级。利用NVIC从可以达到极快的中断响应速度,从中断请求到执行中断服务的第一条指令仅需12个周期。这种极快的响应速度一方面得益
[单片机]
STM32的 位寻址(地址映射)
STM32的寄存器的分布情况: STM比较特色的就是 位带操作: 如下解释: (寄存器的地址是固定好的,我们想要进行位操作的话 就需要用到地址映射,将位带区寄存器的 各位 映射到 位带别名区的地址。) 通过 位带别名区 的 4个字节(32个位)用来存放 位带区的 位地址。 如将 0x2200 0000 映射到 0x2000 000 的第一个位! 具体的映射C程序是这样的: 算法公式: (addr & 0xF0000000)+0x2000000+((addr &0xFFFFF) 5)+(bitnum 2) addr & 0xF0000000: 取0x40
[单片机]
STM32入门学习之GPIO(STM32F030F4P6基于CooCox IDE)(三)

先直接上代码 #include stm32f0xx.h #include stm32_lib/inc/stm32f0xx_rcc.h #include stm32_lib/inc/stm32f0xx_gpio.h int main(void) { //1、使能时钟 RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE); //定义一个IO GPIO_InitTypeDef PORT_LED; //设置IO引脚,模式,输出类型,速度 PORT_LED.GPIO_Pin=GPIO_Pin_4;//IO引脚,第4脚(个人的小板子PA4有连接LE
[单片机]

stm32HAL库版本软件设计基础知识
一、去掉多余的hal库内外设 实际上可以根据工程需要添加,这样可以减少工程编译时间。 必须要的是:rcc时钟/内核/电源/dma 大概率要用的:gpio、usart stm32f4xx_hal.c //最基本的东西 stm32f4xx_hal_cortex.c //内核 stm32f4xx_hal_gpio.c //端口(95%情况要用) stm32f4xx_hal_pwr.c //电源 stm32f4xx_hal_pwr_ex.c stm32f4xx_hal_rcc.c //配置系统时钟和使能外设时钟 stm32f4xx_hal_rcc_rx.c stm32f4xx_hal_usa
[单片机]
msp430和stm32 lcd屏驱动程序
最近使用了一块MSP430F5529单片机做课设,自带的拓展板上有一块12864的COG的LCD屏,记录下使用的驱动程序。 硬件原理图: COG_CS为片选信号,每次数据或指令通信完毕,需要拉低拉高一次。COG_RST为上电复位引脚,正常工作后不控制。 COG_A0是数据命令选择端,低电平表示传输的是数据,高电平表示传输的时命令。 COG_SCLK是时钟信号,上升沿有效。 COG_SDA为数据线,只能写不能读,无法读取COG内部的显存数据。COG_BKLED为背光控制IO,低电平背光点亮,高电平背光熄灭。 驱动程序: 头文件: #ifndef LCD_H_ #define LCD_H_ #define LCD_
[单片机]
STM32看门狗的使用
为什么使用看门狗 事情很简单先前做的一款采集数据的产品不知道为何异常,陷入死循环然后“死机”,分析了很多次,没发现原因,但是每次重新上点后就能正常采集到数据。后来找到了解决方法:看门狗!目的是当程序走入死循环或者硬件异常时,可以自动复位,这样就可以得到跟重新上电后差不多的效果了。 使用的平台:stm32f103系列单片机 使用的烧写调试模式:Jlink SWD 模式。 使用STM32官方模板库。 ST系列单片机看门狗分为两种: 1.独立看门狗,2.窗口看门狗。 独立看门狗: 可参看RM(reference Manual)的Independent watchdog (IWDG) 当然,只是简要查看
[单片机]
STM32 的gpio mode set 详解
最近在看数据手册的时候,发现在Cortex-M3里,对于GPIO的配置种类有8种之多: (1)GPIO_Mode_AIN 模拟输入 (2)GPIO_Mode_IN_FLOATING 浮空输入 (3)GPIO_Mode_IPD 下拉输入 (4)GPIO_Mode_IPU 上拉输入 (5)GPIO_Mode_Out_OD 开漏输出 (6)GPIO_Mode_Out_PP 推挽输出 (7)GPIO_Mode_AF_OD 复用开漏输出 (8)GPIO_Mode_AF_PP 复用推挽输出 对于刚入门的新手,我想这几个概念是必须得搞清楚的,平时接触的最多的也就是推挽输出、开漏输出、上拉输入这三种,但一直未曾对这些做过归纳。因此,在这里做一个总
[单片机]
基于STM32的步进电机速度控制
项目需求 在制作一个使用全向轮的机器人底盘,对于全向轮,电机的精度是影响效果的重要因素。所以使用了步进电机,使用步进电机的优点是可以不使用编码器,开环控制即可达到高精度的效果。 调整占空比或者调整周期 众所周知,PWM有两个重要参数,周期与占空比。 步进电机的运动方式是,每收到一个脉冲,就旋转指定的角度。因此影响电机速度的唯一参数就是PWM的频率。以下附图两张来说明调整占空比与调整周期的区别。 周期固定,调整占空比 上图中有4个PWM,它们的周期是一样的,不同之处是拥有从80%至20%的占空比。可以看出,无论占空比为多少,在1s内,它们产生的高电平的数量是一样的,即无论占空比为多少,PWM的频率都一致。因此也就无法调整步进
[单片机]
 机电一体化设备安装与调试 (刘晓华 , 段慧龙)
机电一体化设备安装与调试 (刘晓华 , 段慧龙) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用
小广播
热门活动
换一批
更多
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章

更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
11月14日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号