1. 实验任务
用AT89S51单片机的定时/计数器T0产生一秒的定时时间,作为秒计数时间,当一秒产生时,秒计数加1,秒计数到60时,自动从0开始。硬件电路如下图所示
2. 电路原理图
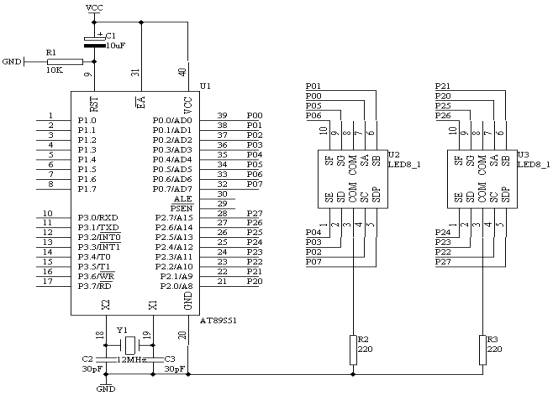
图4.15.1
3. 系统板上硬件连线
(1. 把“单片机系统”区域中的P0.0/AD0-P0.7/AD7端口用8芯排线连接到“四路静态数码显示模块”区域中的任一个a-h端口上;要求:P0.0/AD0对应着a,P0.1/AD1对应着b,……,P0.7/AD7对应着h。
(2. 把“单片机系统”区域中的P2.0/A8-P2.7/A15端口用8芯排线连接到“四路静态数码显示模块”区域中的任一个a-h端口上;要求:P2.0/A8对应着a,P2.1/A9对应着b,……,P2.7/A15对应着h。
4. 程序设计内容
AT89S51单片机的内部16位定时/计数器是一个可编程定时/计数器,它既可以工作在13位定时方式,也可以工作在16位定时方式和8位定时方式。只要通过设置特殊功能寄存器TMOD,即可完成。定时/计数器何时工作也是通过软件来设定TCON特殊功能寄存器来完成的。
现在我们选择16位定时工作方式,对于T0来说,最大定时也只有65536us,即65.536ms,无法达到我们所需要的1秒的定时,因此,我们必须通过软件来处理这个问题,假设我们取T0的最大定时为50ms,即要定时1秒需要经过20次的50ms的定时。对于这20次我们就可以采用软件的方法来统计了。
因此,我们设定TMOD=00000001B,即TMOD=01H
下面我们要给T0定时/计数器的TH0,TL0装入预置初值,通过下面的公式可以计算出
TH0=(216-50000) / 256
TL0=(216-50000) MOD 256
当T0在工作的时候,我们如何得知50ms的定时时间已到,这回我们通过检测TCON特殊功能寄存器中的TF0标志位,如果TF0=1表示定时时间已到。
5. 程序框图

图4.15.2
6. 汇编源程序(查询法)
SECOND EQU 30H
TCOUNT EQU 31H
ORG 00H
START: MOV SECOND,#00H
MOV TCOUNT,#00H
MOV TMOD,#01H
MOV TH0,#(65536-50000) / 256
MOV TL0,#(65536-50000) MOD 256
SETB TR0
DISP: MOV A,SECOND
MOV B,#10
DIV AB
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,B
MOVC A,@A+DPTR
MOV P2,A
WAIT: JNB TF0,WAIT
CLR TF0
MOV TH0,#(65536-50000) / 256
MOV TL0,#(65536-50000) MOD 256
INC TCOUNT
MOV A,TCOUNT
CJNE A,#20,NEXT
MOV TCOUNT,#00H
INC SECOND
MOV A,SECOND
CJNE A,#60,NEX
MOV SECOND,#00H
NEX: LJMP DISP
NEXT: LJMP WAIT
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
7. C语言源程序(查询法)
#include
unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71,0x00};
unsigned char second;
unsigned char tcount;
void main(void)
{
TMOD=0x01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
TR0=1;
tcount=0;
second=0;
P0=dispcode[second/10];
P2=dispcode[second%10];
while(1)
{
if(TF0==1)
{
tcount++;
if(tcount==20)
{
tcount=0;
second++;
if(second==60)
{
second=0;
}
P0=dispcode[second/10];
P2=dispcode[second%10];
}
TF0=0;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
}
}
}
1. 汇编源程序(中断法)
SECOND EQU 30H
TCOUNT EQU 31H
ORG 00H
LJMP START
ORG 0BH
LJMP INT0X
START: MOV SECOND,#00H
MOV A,SECOND
MOV B,#10
DIV AB
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,B
MOVC A,@A+DPTR
MOV P2,A
MOV TCOUNT,#00H
MOV TMOD,#01H
MOV TH0,#(65536-50000) / 256
MOV TL0,#(65536-50000) MOD 256
SETB TR0
SETB ET0
SETB EA
SJMP $
INT0X:
MOV TH0,#(65536-50000) / 256
MOV TL0,#(65536-50000) MOD 256
INC TCOUNT
MOV A,TCOUNT
CJNE A,#20,NEXT
MOV TCOUNT,#00H
INC SECOND
MOV A,SECOND
CJNE A,#60,NEX
MOV SECOND,#00H
NEX: MOV A,SECOND
MOV B,#10
DIV AB
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,B
MOVC A,@A+DPTR
MOV P2,A
NEXT: RETI
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
2. C语言源程序(中断法)
#include
unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71,0x00};
unsigned char second;
unsigned char tcount;
void main(void)
{
TMOD=0x01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
TR0=1;
ET0=1;
EA=1;
tcount=0;
second=0;
P0=dispcode[second/10];
P2=dispcode[second%10];
while(1);
}
void t0(void) interrupt 1 using 0
{
tcount++;
if(tcount==20)
{
tcount=0;
second++;
if(second==60)
{
second=0;
}
P0=dispcode[second/10];
P2=dispcode[second%10];
}
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
}
关键字:定时计数器 T0作
引用地址:15. 定时计数器T0作定时应用技术(一)
用AT89S51单片机的定时/计数器T0产生一秒的定时时间,作为秒计数时间,当一秒产生时,秒计数加1,秒计数到60时,自动从0开始。硬件电路如下图所示
2. 电路原理图

(1. 把“单片机系统”区域中的P0.0/AD0-P0.7/AD7端口用8芯排线连接到“四路静态数码显示模块”区域中的任一个a-h端口上;要求:P0.0/AD0对应着a,P0.1/AD1对应着b,……,P0.7/AD7对应着h。
(2. 把“单片机系统”区域中的P2.0/A8-P2.7/A15端口用8芯排线连接到“四路静态数码显示模块”区域中的任一个a-h端口上;要求:P2.0/A8对应着a,P2.1/A9对应着b,……,P2.7/A15对应着h。
4. 程序设计内容
AT89S51单片机的内部16位定时/计数器是一个可编程定时/计数器,它既可以工作在13位定时方式,也可以工作在16位定时方式和8位定时方式。只要通过设置特殊功能寄存器TMOD,即可完成。定时/计数器何时工作也是通过软件来设定TCON特殊功能寄存器来完成的。
现在我们选择16位定时工作方式,对于T0来说,最大定时也只有65536us,即65.536ms,无法达到我们所需要的1秒的定时,因此,我们必须通过软件来处理这个问题,假设我们取T0的最大定时为50ms,即要定时1秒需要经过20次的50ms的定时。对于这20次我们就可以采用软件的方法来统计了。
因此,我们设定TMOD=00000001B,即TMOD=01H
下面我们要给T0定时/计数器的TH0,TL0装入预置初值,通过下面的公式可以计算出
TH0=(216-50000) / 256
TL0=(216-50000) MOD 256
当T0在工作的时候,我们如何得知50ms的定时时间已到,这回我们通过检测TCON特殊功能寄存器中的TF0标志位,如果TF0=1表示定时时间已到。
5. 程序框图
SECOND EQU 30H
TCOUNT EQU 31H
ORG 00H
START: MOV SECOND,#00H
MOV TCOUNT,#00H
MOV TMOD,#01H
MOV TH0,#(65536-50000) / 256
MOV TL0,#(65536-50000) MOD 256
SETB TR0
DISP: MOV A,SECOND
MOV B,#10
DIV AB
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,B
MOVC A,@A+DPTR
MOV P2,A
WAIT: JNB TF0,WAIT
CLR TF0
MOV TH0,#(65536-50000) / 256
MOV TL0,#(65536-50000) MOD 256
INC TCOUNT
MOV A,TCOUNT
CJNE A,#20,NEXT
MOV TCOUNT,#00H
INC SECOND
MOV A,SECOND
CJNE A,#60,NEX
MOV SECOND,#00H
NEX: LJMP DISP
NEXT: LJMP WAIT
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
7. C语言源程序(查询法)
#include
unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71,0x00};
unsigned char second;
unsigned char tcount;
void main(void)
{
TMOD=0x01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
TR0=1;
tcount=0;
second=0;
P0=dispcode[second/10];
P2=dispcode[second%10];
while(1)
{
if(TF0==1)
{
tcount++;
if(tcount==20)
{
tcount=0;
second++;
if(second==60)
{
second=0;
}
P0=dispcode[second/10];
P2=dispcode[second%10];
}
TF0=0;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
}
}
}
1. 汇编源程序(中断法)
SECOND EQU 30H
TCOUNT EQU 31H
ORG 00H
LJMP START
ORG 0BH
LJMP INT0X
START: MOV SECOND,#00H
MOV A,SECOND
MOV B,#10
DIV AB
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,B
MOVC A,@A+DPTR
MOV P2,A
MOV TCOUNT,#00H
MOV TMOD,#01H
MOV TH0,#(65536-50000) / 256
MOV TL0,#(65536-50000) MOD 256
SETB TR0
SETB ET0
SETB EA
SJMP $
INT0X:
MOV TH0,#(65536-50000) / 256
MOV TL0,#(65536-50000) MOD 256
INC TCOUNT
MOV A,TCOUNT
CJNE A,#20,NEXT
MOV TCOUNT,#00H
INC SECOND
MOV A,SECOND
CJNE A,#60,NEX
MOV SECOND,#00H
NEX: MOV A,SECOND
MOV B,#10
DIV AB
MOV DPTR,#TABLE
MOVC A,@A+DPTR
MOV P0,A
MOV A,B
MOVC A,@A+DPTR
MOV P2,A
NEXT: RETI
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH
END
2. C语言源程序(中断法)
#include
unsigned char code dispcode[]={0x3f,0x06,0x5b,0x4f,
0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,
0x39,0x5e,0x79,0x71,0x00};
unsigned char second;
unsigned char tcount;
void main(void)
{
TMOD=0x01;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
TR0=1;
ET0=1;
EA=1;
tcount=0;
second=0;
P0=dispcode[second/10];
P2=dispcode[second%10];
while(1);
}
void t0(void) interrupt 1 using 0
{
tcount++;
if(tcount==20)
{
tcount=0;
second++;
if(second==60)
{
second=0;
}
P0=dispcode[second/10];
P2=dispcode[second%10];
}
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
}
上一篇:16. 定时计数器T0作定时应用技术(二)
下一篇:14. 4×4矩阵式键盘识别技术
推荐阅读最新更新时间:2024-03-16 15:11
STM32F107定时器4用作外部计数器
不用配置引脚为输入模式,TIM_TIxExternalCLK1Source_TI2为PB7引脚 void TIM4_Init(void) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); TIM_TimeBaseStructure.TIM_Period = 0xffff; TIM_TimeBaseStructure.TIM_Prescaler = 0; TIM_TimeBaseStructure.TIM_ClockDivision = 0;
[单片机]
AVR单片机定时计数器学习笔记分享

定时计数器的结构与应用定时计数器(Timer/Counter)常用于计数、延时、测量 周期、频率、脉宽、提供定时脉冲信号等。在实际应用中,对于转速,位移、速度、流量等物理量的 测量,通常也是由传感器转换成脉冲电信号,通过使用定时计 数器来测量其周期或频率,再经过计算处理获得。 AVR的定时计数器接口功能: 通过定时计数器与比较匹配寄存器相互配合,生成占空比 可变的方波信号,即脉冲宽度调制输出PWM信号,可用于 D/A、马达无级调速控制、变频控制等。本文主要介绍的是AVR单片机定时/计数器学习笔记,具体的跟随小编来了解下。 AVR单片机定时/计数器学习笔记 定时/计数器1(16位)有普通模式、CTC模式、
[单片机]

AVR/Arduino定时/计数器、中断入门
在Arduino中,可以使用AnalogWrite来使用硬件产生490Hz/980Hz的pwm波,并可根据参数来设定占空比。不了解这个的同学可以去AnalogWrite学习下,SecretsOfArduinoPWM也是讲了Arduino在avr的定时/计数器上做的封装,我们这里并不讲Arduino相关,而是讲AVR的定时/计数器,如何产生更多PWM波和定时/计数器的中断使用。 AVR Timer/Counter(以下统称Timer) 以ATmega358p为例,其内部拥有一个16位计时器,两个8位计时器,下图则为16位计时器的大致图解: 对于没有接触过avr内部的Arduino同学来说,这张图看不出来任何意思,别急,这些都是AV
[单片机]
增强定时计数器和PWM输出功能
1.1 引言 随着计算机技术和电力电子技术的发展,变频驱动技术凭借其优异的性能,在当今交流调速领域的应用越来越广。 变频驱动主要使用的驱动波形主要有SPWM和SVPWM两种。SPWM原理简单、实现容易,是现在使用最广的一种变频驱动波形。但其有一个致命的弱点是其电源利用率不高(只有86%)、谐波成分大。因此,在新近开发的产品中其应用逐渐被性能优异的SVPWM所取代。 SVPWM是一种电压利用率、低谐波成分的变频驱动波形,还有开关次数少、功率管功耗小等特点。同时,SVPWM还能很好的结合矢量控制算法、以最大限度的发挥设备的性能。因此被越来越多的变频设备所采用。 1.2 芯片简介 SPMC75系列MCU是凌阳
[单片机]
用51单片机定时计数器控制LED1s闪烁一次
#include reg51.h //头文件 sbit LED=P2^0;//位定义LED灯 void Timer0()//使用定时计数器所做的处理函数,用做定时器 { TMOD=0x01;//定时器0,方式1 TH0=0xFC;//定时1ms的初值 TL0=0x18;//定时1ms的初值 ET0=1;//打开定时计数器0使能控制位 EA=1;//打开总中断 TR0=1;//打开定时计数器0的启动控制位 } void main()//主函数 { Timer0();//调用函数 while(1); } void ledxs()interrupt 1//中断执行内容函数,用定时器
[单片机]
单片机定时器与单片机计数器
本文主要介绍单片机芯片解密的相关基础知识:单片机计数器和单片机定时器。 一、计数概念的引入 在介绍单片机计数器和定时器之前,先从选票的统计谈起:画“正”。这就是计数,生活中计数的例程处处可见。例:录音机上的计数器、家里面用的电度表、汽车上的里程表等等,再举一个工业生产中的例程,线缆行业在电线生产出来之后要计米,也就是测量长度,怎么测法呢?用尺量?不现实,太长不说,要一边做一边量呢,怎么办呢?行业中有很巧妙的办法,用一个周长是1米的轮子,将电缆绕在上面一周,由线带轮转,这样轮转一周不就是线长1米嘛,所以只要记下轮转了多少圈,就能知道走过的线有多长了。 二、单片机计数器的容量 从一个生活中的例程看起:一个水盆在
[单片机]
PLC中编写定时器和计数器的自复位功能
CTU:加法计数器 分析:当计数值达到5,Q输出M300.0=1,在下一周期时执行复位 指令,使得计数值清零,之后Q输出M300.0=0,实现自复位计数器 并产生脉冲。M300.0有一个从1变0的过程。 计数器自复位程序 CTD减法计数器 了解内容:减计数器和加减计数器。要先装载LD,再减。每当0.0从“0”变为“1”, CV减少1;当MD4=0时,Q=1,此后每当CD从“0”变为“1”, Q保持输出“1”,CV继续减少1直到达到计数器指定的整数类型的最小值。 在任意时刻,只要I0.2=1时,Q输出“0”,CV立即停止计数并回到PV值。 C TD减法计数器 TON:接通延时 定时器 按下启动按钮, 电机 运行5秒自动停
[嵌入式]
51单片机定时/计数器T0、T1的组成与功能简介
1、 主体结构 1)16位加法 计数器 ,由高8位(THi)和低8位(TLi)SFR组成。 2)在用作计数器时,引脚P3。4(T0)和P3。5(T1)分别是两个计数器的外部脉冲输入端。 3)引脚P3。2(/INT0)和P3。3(/INT1)在位GATE=1时可用作T0、T1的门控信号。 4)SFR-TCON和TMOD控制T0和T1的运行状态和工作方式。 2、 控制寄存器TCON(地址88H) D7~D0:TF1 TR1 TF0 TR0 IE1 IT1 IE0 IT0 高4位与定时/计数器有关,低4位用于控制外部中断。 TFi-定时/计数器溢出标志位;计数溢出时,硬件自动置1,在中断允许条件下,是向CPU请求中断的
[单片机]
 电脑世界的通关密语:电脑编程基础 (杉浦贤)
电脑世界的通关密语:电脑编程基础 (杉浦贤) 硬件架构艺术:数字电路的设计方法与技术
硬件架构艺术:数字电路的设计方法与技术
小广播
热门活动
换一批
更多

设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题

最新单片机文章

更多精选电路图






更多热门文章
更多每日新闻
- PC产业驶入创新超车道,英特尔蓉城撬动AI新引擎
- 与产业聚力共赢,英特尔举行新质生产力技术生态大会
- “新”享5G-A万兆网络前沿体验 高通携手产业伙伴亮相第二届链博会
- 英飞凌推出符合ASIL-D标准的新型汽车制动系统和电动助力转向系统三相栅极驱动器 IC
- 南芯科技推出80V升降压转换器,持续深耕工业储能市场
- 法雷奥与罗姆联合开发新一代功率电子领域
- 贸泽电子开售能为电动汽车牵引逆变器提供可扩展性能的 英飞凌HybridPACK Drive G2模块
- 德州仪器新型 MCU 可实现边缘 AI 和先进的实时控制, 提高系统效率、安全性和可持续性
- 瑞萨推出高性能四核应用处理器, 增强工业以太网与多轴电机控制解决方案阵容
- 研华全新模块化电脑SOM-6833助力5G路测设备升级
更多往期活动
- 有奖调查——We want you!好的参考设计网站什么样?
- 【EE征集令】LaunchPad学习全体验
- 下载Intel《赢得大资料爆炸——大资料、智慧系统与物联网的时代》白皮书
- 电源小课堂—AC/DC电源设计的选型
- 体积小、功耗低、安全性高,专用加密芯片ATSHA204 精彩专题,答题有好礼!
- 有奖直播:赋能移动电源,贝能推出1800W全数字双向电源方案
- 【主题月活动】术业有专攻,电容我在行!
- 可靠QTouch技术集成邻键抑制(AKS)功能,适用任何触摸应用领域
- 观看安森美半导体高灵敏度触摸传感器应用视频,轻松答题赢好礼!
- 有奖直播:使用 NI CompactDAQ 和 LabVIEW构建基于传感器的测试系统
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号