以ATMEL公司的AT89S51/AT89S52单片机为例,介绍ISP技术原理,及ISP在线编程器的实现方法。
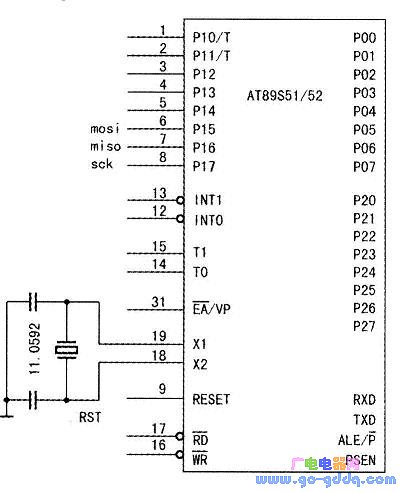
AT89S51/AT89S52单片机的ISP引脚共有4个:RST、MOSI、MISO和SCK。
各引脚的功能如下:RST为在线编程输入控制端,仅在ISP下载过程中保持高电平,在系统正常工作时该引脚为系统复位端,保持低电平状态。MOSI为主机输出/从机输入的数据端,系统正常工作时,该引脚为通用I/OP1.5口线。MISO为主机输入/从机输出的数据端。系统正常工作时,该引脚为通用1/0P1.6口线。SCK为串行编程的时钟端,可实现主、从机时序的同步,该时钟频率不得超过系统时钟的1/16。
系统正常工作时,该引脚为通用I/OPl.7口线。AT89S51/AT89S52单片机的ISP引脚功能如下图所示。
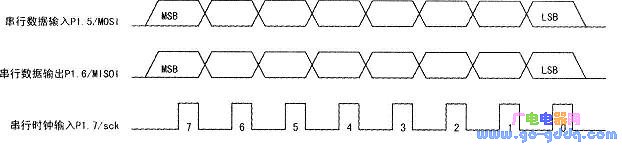
ISP下载是基于串行传输方式,并且符合SPI协议。在SPI协议中,数据的发送和接收是同步进行的,即在同步时钟的作用下,在发送数据的同时也接收数据。
ISP的时序如下图所示。每一字节的数据都是低位在先,高位在后,在串行时钟的作用下逐位传输。在传输过程中,数据是在时钟输入端为高电平时有效,在时钟输入端低电平时更新数据,在编写ISP下载程序时务必注意这一点。
ISP下载功能的指令集如下表所示。
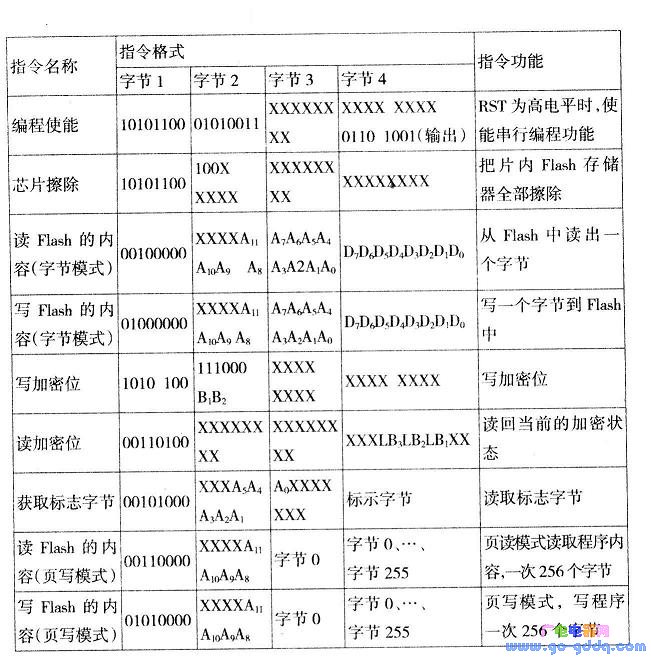
使用上述指令时,需注意以下事项:
1.要进行ISP编程,首先要确保RST引脚为高电平,且该高电平一直持续到整个编程过程结束。
2.ISP编程操作是通过不同的指令实现的,以编程使能命令作为其他命令的前导命令,必须首先执行编程使能命令,再执行其他命令。例如要擦除芯片,首先执行编程使能命令,然后执行芯片擦除命令,这样才能完成操作擦除。
3.各个命令有自己的格式,使用不同命令时,必须严格按照命令的格式进行,例如在芯片擦除命令中,虽然有2个多字节可为任意数据,但也要发送。
4.ISP数据传输符合SPI协议,虽然在发送数据的同时也接收数据,但接收数据的取舍是由用户决定。
5.在ISP编程中尤其是写Flash的过程中,最好不要被意外情况中断,比如断电,或者RST引脚电压变低,这样容易造成芯片内部的Flash永久性损坏。
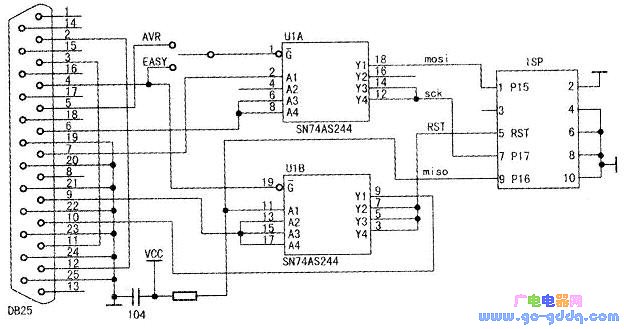
AT89S51/AT89S52单片机的在线编程(ISP)电路设计如下:计算机并行接口共有25个口线,丰要包括数据端口DO—D7(端口发地址为378H,用于数据输出);状态端口Busy、nAck.PE、Select、nError(端口地址为379H,用于数据输入);控制端口nSelin、nlnit、AnrtoFeed、nStrobe(端口地址为37AH,用于输出控制)。从中选出4个口线来模拟ISP所需的引脚,非常灵活,只需考虑数据的输入、输出方向及操作方便,但要注意同一端口的数据方向必须一致,例如数据端口是8位同时操作的,只能全部作为输入或输出,而不能将一部分作输入,另一端分作输出。电路下图可实现ISP(在系统编程)的功能。
该电路在计算机并行接口部分,用第⑥脚模拟SCK、第⑦脚模拟MOSI,第⑨脚模拟RST、第⑩脚模拟MISO。用第④脚来控制驱动隔离电路SN74AS244的使能端。注意不同端口操作地址不同,这涉及程序的编写。下图中UIB的引脚A2、A3、A4并接是为了增大驱动能力,上拉电阻是为了确保空闲时的电平状态。该电路制作出的实物如右图所示。
不同的在线编程电路对应于不同的硬件电路,在程序实现上也有区别。本文的硬件电路设计完全依照共享软件Easy51Pro来完成设计的,故可上网下载此共享软件来实现在线编程,并目,下载后无须安装即可直接运行该程序以实现ISP(在线编程)的功能。
关键字:单片机 ISP技术 在线编程器
引用地址:
基于单片机ISP技术原理及在线编程器的实现
推荐阅读最新更新时间:2024-03-16 15:50
瑞萨电子推出全球首款28nm汽车级MCU
2018年3月27日,日本东京讯 – 全球领先的半导体解决方案供应商瑞萨电子株式会社(TSE:6723)于今日发布了业界第一款使用28nm工艺的集成闪存微控制器(MCU),并于即日起开始交付样片。为了打造下一代更高效、更可靠的环保汽车和自动驾驶汽车,这款革命性的RH850/E2x系列微控制器内置了多达6个400Mhz的处理器核心,成为业界第一款(注1)能达到9600MIPS(注2)指令处理能力的车用控制片内闪存MCU。该系列MCU还具有多达16MB的内置闪存以及更完善的安保功能和功能安全性。 Renesas autonomy™是瑞萨电子面向智能辅助驾驶和自动驾驶开发推出的开放、创新和可信赖的开发平台。通过该平台,瑞萨电子为汽
[汽车电子]

基于89C52单片机的实用八路物位测量仪
1、总体构成
本测量仪的信号采样通过P0口的八根输入线可接受八路经过整形后的标准TTL电平,因此可测量不同传感器传来的脉冲型物位采样信号,只要在原始信号基础上加以整形处理即可,每来一个脉冲均被P0口捕捉到并可以通过软件编制使脉冲计数增一,定时读取计数和便可以换算成相应的物位情况。通过P3.3~P3.5三条线与串行显示驱动器Max7219的连接加以软件编程可完成八位数码管显示驱动,利用P1.3~P1.6四条口线接入四个按键,完成按键操作,利用P2口作为八路输出控制,可驱动八路固态继电器。
2、硬件线路设计
2.1 资源分配
AT89C52 芯片是基于MCS-51结构的高集成度8位微控制
[单片机]
e2v 发布首款适用于太空应用的 GHz 级微处理器
领先的高可靠性半导体解决方案供应商 e2v 日前宣布,推出世界上首款适用于太空应用的 GHz 级 Power Architecture™ PC7448 版本微处理器,该处理器可集成到适用于太空应用的设备上。 PC7448 是e2v 的 Power Architecture™ 系列中首款具有太空应用能力的产品。它是一款已广泛应用于航空器计算平台的 RISC 微处理器。它的运行速度高达 1267MHz,如果和 AltiVec™ 引擎配合使用,可提供强大的浮点计算功能,满足苛刻的信号处理应用要求。该处理器采用 90nm CMOS SOI 制造工艺,具有抗辐射性能(就电离总剂量和重离子辐射而言)。 太空级 PC7448 版
[嵌入式]
采用ATmega16单片机的干式变压器智能控制器系统设计
1工作原理 温控仪由温度监测、信号处理、输出控制三部分组成。系统框图如图1所示,它通过预埋在 变压器三相绕组中的三只铂电阻传感器获取绕组温度值,经信号调理电路处理后直接送入控 制器的A/D转换输入端。微控制器根据信号数据及设定的各种控制参数,按照嵌入的软件控 制规律执行计算与处理,自动显示变压器绕组的温度值、输出相应的控制信号、控制风机的 启停,并根据当前状态输出正常、报警和跳闸信号等,同时将各种数据通过RS-485传到上 位机实现集中监控。 温控仪控制核心采用ATmegal6单片机,它是一款基于AVR RISC的低功耗CMOS 8位单片机,在 一个时钟周期内执行一条指令,可以取得1MIPS/MHz的性能,因此具有实时性。
[单片机]
基于NXP MCU的ADB自适应汽车大灯系统解决方案
致力于亚太地区市场的领先半导体元器件分销商---大联大控股宣布,其旗下品佳推出基于恩智浦( NXP )MCU的 ADB (adaptive driving beam)自适应汽车大灯系统解决方案。NXP的第三代ADB自适应大灯系统可以更好的提升照射范围且设计新颖,拥有薄型化的体积、低功耗与长寿命,其远光灯/近光灯则由多组光源组成,每一组光源搭配一个透镜,而此项透镜同时具有反射与折射作用。 该方案符合车规AEC-Q100认证,且设计拆用模块化方式,将头灯分为三个区块Control MCU+Boost/Buck/+Matrix驱动,更多元化的提供了设计的思路。利于客户尽快实现量产。 图示1-大联大品佳推出基于NXP MCU的
[嵌入式]
基于MCS-96系列单片机的数字正弦机研制
在伺服系统的调试过程中,需要能够准确发送各种测试信号的正弦机。但通常使用的机电正弦机具有难以克服的机械传动空回、死区及波形失真和漂移、装订参数可重复性差等缺点。 为了克服以上缺点,作者开发了8098数字正弦机。 1 硬件组成 8098数字正弦机采用MCS-96系列8098单片机[1,2](也可选用兼容的80C196单片机)和5VASZZ系列DSC模块,以软件方法产生阶跃、等速、周期等速和正弦等信号,通过8255直接16位数字输出,或分精粗各12位数字量分送两个DSC转化为三相模拟电压双通道输出。在此过程中,利用8279显示和控制正弦机的运行状态。8098数字正弦机的硬件组成框图如图1。 图1 8098数池正弦机
[单片机]
单片机的布板的一些经验心得
1、 下面的一些系统要特别注意抗电磁干扰: (1) 微控制器时钟频率特别高,总线周期特别快的系统。 (2) 系统含有大功率,大电流驱动电路,如产生火花的继电器,大电流开关等。 (3) 含微弱模拟信号电路以及高精度A/D变换电路的系统。 2、 为增加系统的抗电磁干扰能力采取如下措施: (1) 选用频率低的微控制器: 选用外时钟频率低的微控制器可以有效降低噪声和提高系统的抗干扰能力。同样频率的方波和正弦波,方波中的高频成份比正弦波多得多。虽然方波的高频成份的波的幅度,比基波小,但频率越高越容易发射出成为噪声源,微控制器产生的最有影响的高频噪声大约是时钟频率的3倍。 (2) 减小信号传输中的畸变 微控制器主要采用高速CMO
[单片机]
单片机机器人设计
1 引言 轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。在各种移动机构中,轮式移动机构最为常见。轮式移动机构之所以得到广泛的应用。主要是因为容易控制其移动速度和移动方向。因此.有必要研制一套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计和开发了基于5l型单片机的自动巡线轮式机器人控制系统。 2 控制系统总体设计 机器人控制系统由主控制电路模块、存储器模块、光电检测模块、电机及舵机驱动模块等部分组成,控制系统的框图如图1所示。 3 主控制模块设计 3.1 CPLD设计 在机器人控制系统中.需要控制多个电动机和行程开关.还要进行光电检测.如果所有的任
[单片机]

 单片机创新实践应用.
单片机创新实践应用. 硬件架构艺术:数字电路的设计方法与技术
硬件架构艺术:数字电路的设计方法与技术












 京公网安备 11010802033920号
京公网安备 11010802033920号