在实际项目大批量生产调试设备时,笔者发现同样版本的程序在不同设备上运行时效果不一致,一部分设备串口通信正常,另外一部分串口通信不正常。通过示波器对多个设备的串口波特率及系统时钟频率测试,发现不同设备之间的系统时钟频率及波特率存在差异,与理论值不一致,用示波器测试出的系统时钟频率及波特率与理论值偏差较大。由于系统时钟频率的偏差导致波特率设置值超过了串口所允许的最大误差值,故而导致串口通信失败。其根本原因是系统的时钟频率会随环境温度、电压或其他因素变化。
1 原因分析
在异步通信中,波特率是很重要的指标,表示为每秒传送二进制数码的位数,反映了异步串行通信的速度。MSP430的波特率发生器使用一个分频计数器和一个调整器来构成分频因子,此方法能够用较低时钟频率实现高速通信,从而在系统低功耗的情况下,实现高性能的串行通信。MSP430波特率发生器的时钟源可以为通用时钟(Universal CLOCk,UCLK)、辅助时钟(Auxiliary Clock,ACLK),子系统时钟Subsystem Master Clock,SMCLK)。其中,ACLK通常为32 768 Hz,稳定但无法满足高速串口通信;SMCLK为可配置的系统频率,可满足高速串口通信,但不稳定。SMCLK是由数字控制振荡器(DigitallycontrolLED Oscillator,DCO)的调节器模块混合两个频率Fdco和Fdco+,用以产生介于Fdco和Fdco+1之间的频率。从本质上来说,这种调制将时钟能量扩散到一个宽带中,减少了电磁干扰(EMI)。但这样得到的平均频率的调制时钟,其负面影响的表现形式就是频率的抖动。
DCO频率会随着温度和电压的变化而有所波动,在fDCO=1 MHz时,飘移频率随漂移温度变化的比例为0.1%/℃,飘移频率随漂移电压变化的比例为1.9%/V。因此使用SMCLK作为串口时钟源时,用理论频率计算的分频因子和实际频率分频因子有差异,导致串口无法通信。
2 解决方案
2.1 方案1——自动波特率检测模式
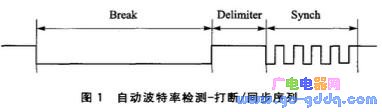
MSP430串口通信支持自动波特率检测,在这种通信模式下,在数据帧前面会有一个包含打断/同步域的同步序列,如图1所示。为了LIN的一致性,该模式下字符格式应为8个数据位,低位优先,没有奇偶校验位和停止位,且地址位不可用。在接收打断/同步域时,串口是不能发送数据的,如果在帧错误下接收到一个0H字节,那么此时发送的任何数据都会遭到破坏。由此可见其通信过程较复杂,使用不便。
2.2 方案2——外接高频晶振
MSP430可外接稳定的高速晶振,但该系列芯片设计为超低功耗的单片机,如外接高频晶振,与该系列低功耗设计理念相违背。即MCU进入低功耗模式(Low-Power Mode,LPM)下晶振并不进入低功耗模式,且会一直耗电,因此会增加系统的耗电量,减少续航时间。
2.3 方案3——根据时钟源自动计算波特率
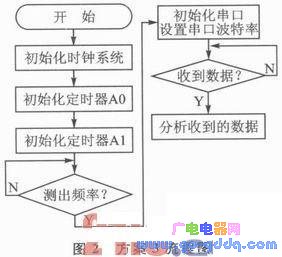
可使用内部低频晶振,通常为32 768 Hz。经过DCO调节器,产生较高的可供串口高速通信的频率FSMCLK。该频率是由DCO调节器模块在32个DCO时钟周期内混合Fdco和Fdco+1产生的介于Fdco和Fdco+1之间的频率,该调节模式从本质上减小了电磁干扰。并且FSMCLK会在MCU进入LPM模式后自动关闭以节电,直至MCU退出低功耗模式。得到高频时钟后,可通过两个定时器精准计算出FSMCLK,并根据该值设置波特率,此方法可消除器件差异性,以保证单片机串口在不同温度和电压下正常工作。该方案简单、易实现、抗电磁干扰强、省电效果好,并且从一定程度上消除了系统频率随温度、电压变化所带来的影响。该方案优于方案1和方案2;其实现流程如图2所示。
3 系统工作频率计算
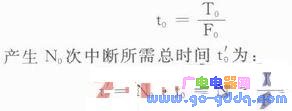
对于定时器A0,其时钟源频率为F0,使定时器A0工作在计数器模式下并设置每计数T0次产生一次中断,即每中断一次的时间t0为:
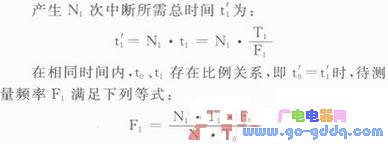
对于定时器A1,其时钟源频率为F1,使定时器A1工作在计数器模式下并设置每计数T1次产生一次中断,即每中断一次的时问t1为:
![]()
4 波特率设置
对于给定串口时钟源BRCLK,分频因子N满足:
N=BRCLK/Baudrate
分频因子N常常不是整数,因此,至少需要一个分频计数器和一个调整器来产生一个近似于分频因子N的数。
在低频模式下,整数部分分频因子满足:
UCBRx=INT(N)
且分数部分满足下列公式:
UCBRSx=round[(N-INT(N))×8]
设置波特率程序如下:
division_factor=f_smclk/(Baudrate*1.0);
UCA0BR0=(int)division_factor;
UCA0BR1=((int)division_factor)>>8;
UCA0MCTL|=(int)((division_factor_(int)division_factor)*8);
5 方案验证
如方案3所述,先测出串口时钟源的当前频率,再根据该频率设置波特率寄存器及调整器的值。将修改后的程序下载到串口能通信和串口不能通信的多个设备进行验证。通过示波器测试发现,被测设备的时钟频率存在差异,各设备之间的频率不一定相同,同时发现串口的实际波特率与理论波特率一致,其表现形式为串口能正常通信。至此,方案3通过验证,该方案可有效避免因串口时钟源时钟偏移导致不能通信的问题。
结语
实践证明,计算出内部时钟经过倍频后的高频时钟,再根据该时钟频率设置串口波特率的方法可行。该方法从纯软件的角度有效地解决了单片机内部时钟频率不稳定,单片机因环境温度、气压、电磁等导致系统时钟频率偏差,以及单片机器件之间的差异性等因素导致串口通信失败的问题。
上一篇:基于MSP430F149单片机的高精度温箱温度控制系统设计
下一篇:单片机多任务的实现方式
推荐阅读最新更新时间:2024-03-16 15:58

 单片机创新实践应用.
单片机创新实践应用. 硬件架构艺术:数字电路的设计方法与技术
硬件架构艺术:数字电路的设计方法与技术
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题








- PC产业驶入创新超车道,英特尔蓉城撬动AI新引擎
- 与产业聚力共赢,英特尔举行新质生产力技术生态大会
- “新”享5G-A万兆网络前沿体验 高通携手产业伙伴亮相第二届链博会
- 英飞凌推出符合ASIL-D标准的新型汽车制动系统和电动助力转向系统三相栅极驱动器 IC
- 南芯科技推出80V升降压转换器,持续深耕工业储能市场
- 法雷奥与罗姆联合开发新一代功率电子领域
- 贸泽电子开售能为电动汽车牵引逆变器提供可扩展性能的 英飞凌HybridPACK Drive G2模块
- 德州仪器新型 MCU 可实现边缘 AI 和先进的实时控制, 提高系统效率、安全性和可持续性
- 瑞萨推出高性能四核应用处理器, 增强工业以太网与多轴电机控制解决方案阵容
- 研华全新模块化电脑SOM-6833助力5G路测设备升级




 京公网安备 11010802033920号
京公网安备 11010802033920号