一、任务的就绪与调度
1.1 任务状态
从ucosii用户手册(可以从上篇文章提到的地址下载)上的任务状态切换示意图:
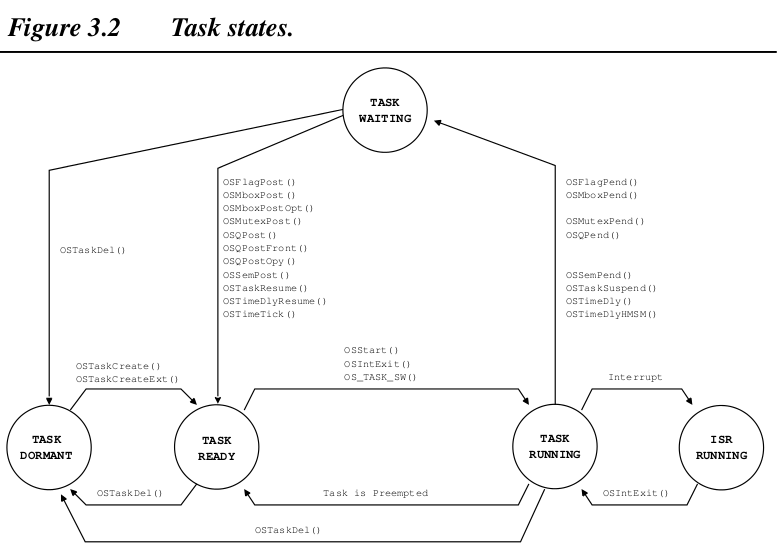
如果学习过类似《操作系统》这样的课,会发现这张图很容易理解。
DORMANT (休眠状态)
这里我总算知道了为什么UCOS用Task的概念,而不是Process。如果仅仅将一段要被执行的指令序列称之为Process,那么它应该是不存在休眠状态的。因为一旦Process被释放,它就仅仅是一个静态的Program。它只是存在一个文件里,等着被其他进程被动调用的一段指令。
Task这个抽象的概念涵盖的面更广一点,当一段Task代码不被UCOS监控时,它就处于休眠态,永远不可能占用CPU。
调用OSTaskCreate()或 OSTaskCreateExt()可以将该任务置于就绪状态。当有新的任务进入就绪状态时,如果该任务优先级最高,它会立即运行。
调用OSTaskDel()可以让任务进入休眠状态。
READY (就绪状态)
当任务进入就绪状态时,每次调度程序都会选择就绪列表中优先级更高的任务来运行。
要进入多任务状态,必须先调用OSStart()。
RUNNING (运行状态)
该任务正占用CPU,直到它自己放弃CPU或者被中断程序打断。
WAITING(等待状态)
正在运行的任务可以调用OSTimeDly()或 OSTimeDlyHMSM()来延时等待一段时间,在这段时间内,该任务处于挂起状态。
也可以调用OSSemPend(),OSMboxPend(),或 OSQPend()来等待某个事件的发生,等待期间该任务也处于挂起状态。
如果所有任务都被挂起,那么系统将会运行一个优先级最低的空闲任务,执行执行 OSTaskIdle()函数。
1.2 任务控制块
Tcb是一个很关键的数据结构,Tcb里每个成员变量描述单一进程的单个属性,一个Tcb结构体描述单一进程的一组属性,Tcb链表描述所有进程的所有属性。之所以各个Tcb之间呈链表结构而不是数组,是因为多任务环境是动态的,进程可以被随时创建和消灭。
Tcb的成员变量大概分成以下几个部分:
(一)用于任务堆栈
变量定义:
OS_STK *OSTCBStkPtr;#if OS_TASK_CREATE_EXT_EN void *OSTCBExtPtr; OS_STK *OSTCBStkBottom; INT32U OSTCBStkSize; INT16U OSTCBOpt; INT16U OSTCBId;#endif123456789
OSTCBStkPtr和OSTCBStkBottom分别描述栈顶和栈尾,OSTCBStkSize为堆栈大小。
OSTCBExtPtr为我们可以自己编辑的Tcb扩展块,OSTCBId为保留字,UCOSII版本暂未使用。
OSTCBOpt为选择项,表示在建立任务时要不要将任务堆栈清零。
(二)用于链表结构
变量定义:
struct os_tcb *OSTCBNext;struct os_tcb *OSTCBPrev;12
分别指向Tcb链表结构里的前一个和下一个成员。
(三)用于任务调度
变量定义:
if (OS_Q_EN && (OS_MAX_QS >= 2)) || OS_MBOX_EN || OS_SEM_EN
OS_EVENT *OSTCBEventPtr;#endif#if (OS_Q_EN && (OS_MAX_QS >= 2)) || OS_MBOX_EN
void *OSTCBMsg;#endif
INT16U OSTCBDly;
INT8U OSTCBStat;
INT8U OSTCBPrio;1234567891011
OSTCBEventPtr和OSTCBMsg分别表示事件控制块的指针和传给任务的消息的指针。
OSTCBDly表示任务自己延时挂起的时间。
OSTCBStat表示任务当前的状态,为0表示任务就绪。
OSTCBPrio为任务的优先级。
(四)用于辅助调度算法
变量定义:
INT8U OSTCBX; INT8U OSTCBY; INT8U OSTCBBitX; INT8U OSTCBBitY;1234
.OSTCBX, .OSTCBY, .OSTCBBitX 和 .OSTCBBitY用于加快调度算法的运行,分析这个优先级算法需要一定的篇幅,它的核心思想是利用索引加快每次查询的时间。
1.3 已就绪任务的调度
要进行已就绪任务调度的第一件事,是确定哪个就绪的任务是当前优先级最高的任务,这事由OSSched()执行。
函数OSSched()伪代码
void OSSched (void)
{ /* 关中断 */
/* 检查用户是否调用了OSSchedLock()给调度器上锁,或位于中断子程序里。如果是,退出调度。 */
/* 在已就绪进程里查找当前优先级最高的任务 */
/* 判断该任务是否是当前的任务,如果是,退出调度程序 */ }12345678910
该函数执行完以后,OSTCBHighRdy指针总是指向即将运行的任务的Tcb,这作为一个接口供OS_TASK_SW()进行真正的任务切换工作。OS_TASK_SW()是一个宏,它生成以此软中断。软中断里执行任务调度。
OSCtxSw()伪代码
void OSCtxSw()
{ /* 保存当前任务的寄存器值 */
/* 将新任务的一些属性传递给内核进行标记 */
/* 恢复新任务的寄存器值 */
/* 执行中断返回指令 */}
上一篇:UCOSii(三)——时间管理
下一篇:UCOSii(一)——系统初始化
推荐阅读最新更新时间:2024-03-16 16:01

 汽车电子产品工艺
汽车电子产品工艺 【得捷电子Follow me第4期】任务源代码汇总
【得捷电子Follow me第4期】任务源代码汇总 Follow me 第4期任务代码
Follow me 第4期任务代码 硬件架构艺术:数字电路的设计方法与技术
硬件架构艺术:数字电路的设计方法与技术
设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题












 京公网安备 11010802033920号
京公网安备 11010802033920号