堆栈是一种具有“后进先出”(LIFO---Last In First Out)特殊访问属性的存储结构。堆栈一般使用RAM 物理资源作为存储体,再加上LIFO 访问接口实现。
堆栈的实现方法:
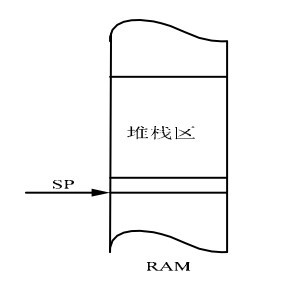
在随机存储器区划出一块区域作为堆栈区,数据可以一个个顺序地存入(压入)到这个区域之中,这个过程称为‘压栈’(push )。通常用一个指针(堆栈指针 SP---Stack Pointer)实现做一次调整,SP 总指向最后一个压入堆栈的数据所在的数据单元(栈顶)。从堆栈中读取数据时,按照堆栈 指针指向的堆栈单元读取堆栈数据,这个过程叫做 ‘弹出’(pop ),每弹出一个数据,SP 即向相反方向做一次调整,如此就实现了后进先出的原则。
堆栈是计算机中广泛应用的技术,基于堆栈具有的数据进出LIFO特性,常应用于保存中断断点、保存子程序调用返回点、保存CPU现场数据等,也用于程序间传递参数。
ARM处理器中通常将寄存器R13作为堆栈指针(SP)。ARM处理器针对不同的模式,共有 6 个堆栈指针(SP),其中用户模式和系统模式共用一个SP,每种异常模式都有各自专用的R13寄存器(SP)。它们通常指向各模式所对应的专用堆栈,也就是ARM处理器允许用户程序有六个不同的堆栈空间。这些堆栈指针分别为R13、R13_svc、R13_abt、R13_und、R13_irq、R13_fiq,如表2-3 堆栈指针寄存器所示。

为了更准确地描述堆栈,根据“压栈”操作时堆栈指针的增减方向,将堆栈区分为‘递增堆栈’(SP 向大数值方向变化)和‘递减堆栈’(SP 向小数值方向变化);又根据SP 指针指向的存储单元是否含有堆栈数据,又将堆栈区分为‘满堆栈’(SP 指向单元含有堆栈有效数据)和‘空堆栈’(SP 指向单元不含有堆栈有效数据)。
这样两两组合共有四种堆栈方式——满递增、空递增、满递减和空递减。
ARM处理器的堆栈操作具有非常大的灵活性,对这四种类型的堆栈都支持。
ARM处理器中的R13被用作SP。当不使用堆栈时,R13 也可以用做通用数据寄存器。
深入理解ARM的这三个寄存器,对编程以及操作系统的移植都有很大的裨益。
PC 代表程序计数器,流水线使用三个阶段,因此指令分为三个阶段执行:
1.取指(从存储器装载一条指令);
2.译码(识别将要被执行的指令);3.执行(处理 指令并将结果写回寄存器)。而R15(PC)总是指向“正在取指”的指令,而不是指向“正在执行”的指令或正在“译码”的指令。一般来说,人们习惯性约定 将“正在执行的指令作为参考点”,称之为当前第一条指令,因此PC总是指向第三条指令。当ARM状态时,每条指令为4字节长,所以PC始终指向该指令地址 加8字节的地址,即:PC值=当前程序执行位置+8;
ARM指令是三级流水线,取指,译指,执行时同时执行的,现在PC指向的是正在取指的地址,那么cpu正在译指的指令地址是PC-4(假设在ARM状态 下,一个指令占4个字节),cpu正在执行的指令地址是PC-8,也就是说PC所指向的地址和现在所执行的指令地址相差8。
当突然发生中断的时候,保存的是PC的地址
这样你就知道了,如果返回的时候返回PC,那么中间就有一个指令没有执行,所以用SUB pc lr-irq #4。
1、堆栈指针r13(SP):每一种异常模式都有其自己独立的r13,它通常指向异常模式所专用的堆栈,也就是说五种异常模式、非异常模式(用户模式和系统模式),都有各自独立的堆栈,用不同的堆栈指针来索引。这样当ARM进入异常模式的时候,程序就可以把一般通用寄存器压入堆栈,返回时再出栈,保证了各种模式下程序的状态的完整性。
2、连接寄存器r14(LR):每种模式下r14都有自身版组,它有两个特殊功能。
(1)保存子程序返回地址。使用BL或BLX时,跳转指令自动把返回地址放入r14中;子程序通过把r14复制到PC来实现返回,通常用下列指令之一:
MOV PC, LR
BX LR
通常子程序这样写,保证了子程序中还可以调用子程序。
stmfd sp!, {lr}
……
ldmfd sp!, {pc}
(2)当异常发生时,异常模式的r14用来保存异常返回地址,将r14如栈可以处理嵌套中断。
3、程序计数器r15(PC):PC是有读写限制的。当没有超过读取限制的时候,读取的值是指令的地址加上8个字节,由于ARM指令总是以字对齐的,故bit[1:0]总是00。当用str或stm存储PC的时候,偏移量有可能是8或12等其它值。在V3及以下版本中,写入bit[1:0]的值将被忽略,而在V4及以上版本写入r15的bit[1:0]必须为00,否则后果不可预测。
ARM处理器使用流水线来增加处理器指令流的速度,这样可使几个操作同时进行,并使处理与存储器系统之间的操作更加流畅,连续,能提供0.9MIPS/MHZ的指令执行速度。
上一篇:初始化ARM处理器各模式下的堆栈指针SP(R13)
下一篇:3.堆栈指针寄存器 SP 详解
推荐阅读最新更新时间:2024-11-09 23:19

 usb_host_device_code
usb_host_device_code 嵌入式实时操作系统的多线程计算-基于ThreadX和ARM
嵌入式实时操作系统的多线程计算-基于ThreadX和ARM 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用




设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题














 京公网安备 11010802033920号
京公网安备 11010802033920号