这节课我们来讲CPU的工作模式(Mode) 状态(State)寄存器
7种Mode:
usr(用户模式)
sys(系统模式)
undefined(und)(未定义模式)
Supervisor(svc)(管理者模式)
Abort(abt)(中止模式)
IRQ(irq)(中断模式)
FIQ(fiq)(快速中断模式)
2种State:
ARM state
Thumb state
寄存器:
备份寄存器(banked register)
当前程序状态寄存器(Current Program Status Register);CPSR
CPSR的备份寄存器:SPSR(Save Program Status Register)
我们仍然以这个母亲为例讲解这个CPU模式
这个母亲无压力看书 –>(正常模式)
要考试,看书—>(兴奋模式)
生病—->(异常模式)
可以参考书籍 《ARM体系结构与编程》作者:杜春雷
对于ARM CPU有7种模式:
1 、usr :类比 正常模式
2 、sys :类比的话兴奋模式
3 、5种异常模式:(2440用户手册72页)
3.1 und :未定义模式
3.2 svc :管理模式
3.3 abt :中止模式: a 指令预取中止(读写某条错误的指令导致终止运行) b 数据访问终止 (读写某个地址, 这个过程出错) ,例如:都会进入终止模式
3.4 IRQ: 中断模式
3.5 FIQ: 快中断模式
我们可以称以下6种为特权模式
und :未定义模式
svc :管理模式
abt :终止模式
IRQ :中断模式
FIQ :快中断模式
sys :系统模式
usr用户模式(不可直接进入其他模式) ,特权模式可以编程操作CPSR直接进入其他模式

这个图是有关各个模式下能访问寄存器的,再讲这个图之前我们先引入 2种state
CPU有两种state:
1 ARM state:使用ARM指令集,每个指令4byte
2 Thumb state:使用的是Thumb指令集,每个指令2byte
比如同样是:
mov R0, R1 编译后
对于ARM指令集要占据4个字节:机器码
对于Thumb指令集占据2个字节:机器码
引入Thumb减少存储空间
ARM指令集与Thumb指令集的区别:
Thumb 指令可以看作是 ARM 指令压缩形式的子集,是针对代码密度的问题而提出的,它具有 16 位的代码密度但是它不如ARM指令的效率高 .
Thumb 不是一个完整的体系结构,不能指望处理只执行Thumb 指令而不支持 ARM 指令集.
因此,Thumb 指令只需要支持通用功能,必要时可以借助于完善的 ARM 指令集,比如,所有异常自动进入 ARM 状态.在编写 Thumb 指令时,先要使用伪指令 CODE16 声明,而且在 ARM 指令中要使用 BX指令跳转到 Thumb 指令,以切换处理器状态.编写 ARM 指令时,则可使用伪指令 CODE32声明.
下节课会演示使用Thumb指令集编译,看是否生成的bin文件会变小很多
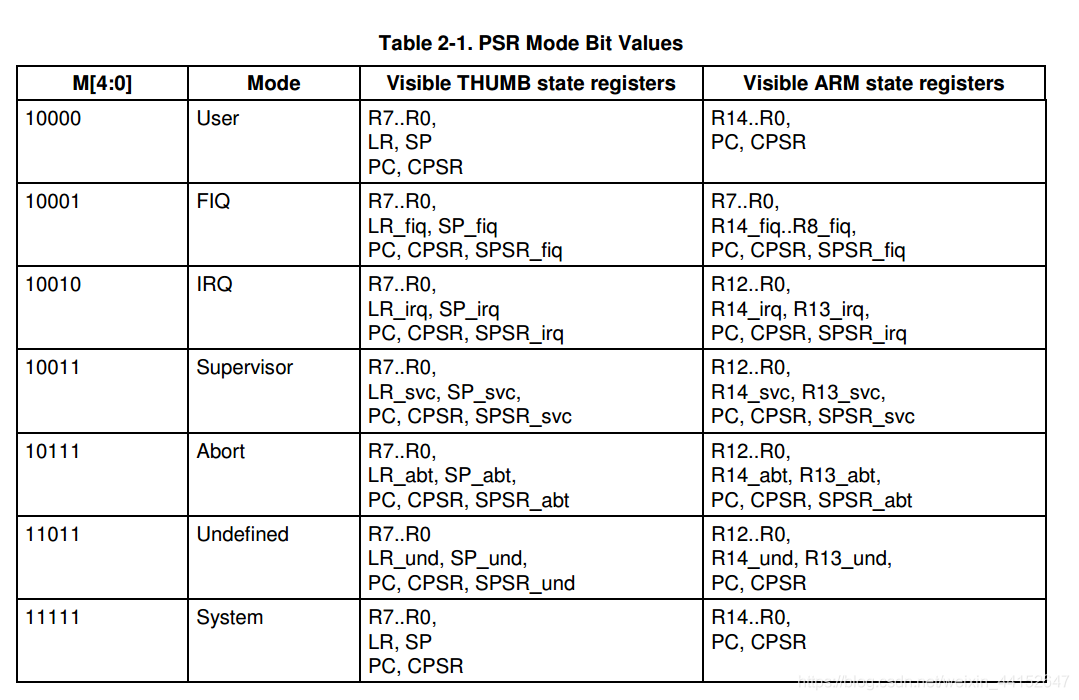
在每种模式下都有R0 ~ R15
在这张图注意到有些寄存器画有灰色的三角形,表示访问该模式下访问的专属寄存器
比如
mov R0, R8
mov R0, R8
在System 模式下访问的是R0 ~ R8,在所有模式下访问R0都是同一个寄存器
mov R0,R8_fiq
但是在FIQ模式下,访问R8是访问的FIQ模式专属的R8寄存器,不是同一个物理上的寄存器
在这五种异常模式中每个模式都有自己专属的R13 R14寄存器,R13用作SP(栈) R14用作LR(返回地址)
LR是用来保存发生异常时的指令地址
为什么快中断(FIQ)有那么多专属寄存器,这些寄存器称为备份寄存器
回顾一下中断的处理过程
1 保存现场(保存被中断模式的寄存器)
就比如说我们的程序正在系统模式/用户模式下运行,当你发生中断时,需要把R0 ~ R14这些寄存器全部保存下来,让后处理异常,最后恢复这些寄存器
但如果是快中断,那么我就不需要保存 系统/用户模式下的R8 ~ R12这几个寄存器,在FIQ模式下有自己专属的R8 ~ R12寄存器,省略保存寄存器的时间,加快处理速度
但是在Linux中并不会使用FIQ模式
2 处理
3 恢复现场
CRSR当前程序状态寄存器,这是一个特别重要的寄存器
SPSR保存的程序状态寄存器,他们格式如下:
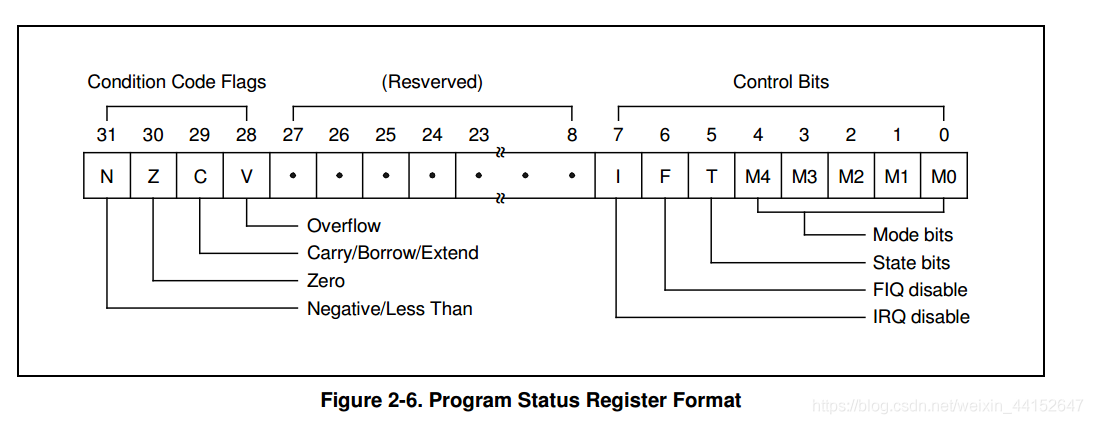
首先 M4 ~ M0 表示当前CPU处于哪一种模式(Mode);
我们可以读取这5位来判断CPU处于哪一种模式,也可以修改这一种模式位,让其修改这种模式;
假如你当前处于用户模式下,是没有权限修改这些位的;
M4 ~ M0对应什么值,会有说明
查看其他位
Bit5 State bits表示CPU工作与Thumb State还是ARM State用的指令集是什么
Bit6 FIQ disable当bit6等于1时,FIQ是不工作的
Bit7 IRQ disable当bit5等于1时,禁止所有的IRQ中断,这个位是IRQ的总开关
Bit8 ~ Bit27是保留位
Bite28 ~ Bit31是状态位,
什么是状态位,比如说执行一条指令
cmp R0, R1
如果R0 等于 R1 那么zero位等于1,这条指令影响 Z 位,如果R0 == R1,则Z = 1
beq跳转到xxx这条指令会判断Bit30是否为1,是1的话则跳转,不是1的话则不会跳转
使用 Z 位,如果 Z 位等于1 则跳转,这些指令是借助状态位实现的
SPSR保存的程序状态寄存器:
表示发生异常时这个寄存器会用来保存被中断的模式下他的CPSR
就比如我我的程序在系统模式下运行 CPSR是某个值,当发生中断时会进入irq模式,这个CPSR_irq就保存系统模式下的CPSR
我们来看看发生异常时CPU是如何协同工作的:
进入异常的处理流程(硬件)

我们来翻译一下:
发生异常时,我们的CPU会做什么事情
1把下一条指令的地址保存在LR寄存器里(某种异常模式的LR等于被中断的下一条指令的地址)
它有可能是PC + 4有可能是PC + 8,到底是那种取决于不同的情况
2 把CPSR保存在SPSR里面(某一种异常模式下SPSR里面的值等于CPSR)
3 修改CPSR的模式为进入异常模式(修改CPSR的M4 ~ M0进入异常模式)
4 跳到向量表
退出异常怎么做?
1、让LR减去某个值,让后赋值给PC(PC = 某个异常LR寄存器减去 offset)
减去什么值呢?
也就是我们怎么返回去继续执行原来的程序,根据下面这个表来取值

如果发生的是SWI可以把 R14_svc复制给PC
如果发生的是IRQ可以把R14_irq的值减去4赋值给PC
2、把CPSR的值恢复(CPSR 值等于 某一个一场模式下的SPSR)
3、清中断(如果是中断的话,对于其他异常不用设置)
上一篇:S3c2440ARM异常与中断体系详解1---概念引入与处理流程
下一篇:S3c2440ARM异常与中断体系详解8---定时器中断程序示例
推荐阅读最新更新时间:2024-11-20 11:11

推荐帖子
- 有做过DVD产品的吗?
- 有做过DVD产品的吗?有做过DVD产品的吗?
-
9043075
 嵌入式系统
嵌入式系统
- 你点过这样的电源输出纹波吗?象有调制信号一样,如何处理啊?
- 第一个波形,有一个低频干扰。没有干扰,电源的纹波会更小的。这个就更差了,已不止一个干扰低频信号,好几个了。你点过这样的电源输出纹波吗?象有调制信号一样,如何处理啊?粉色显示,这个颜色很少见26mV的VP-P你还有什么不满意的。。。。这种情况,只有想办法减小纹波谐波比较多,可以增加滤波电路。纹波只能说尽量减小,不可能完全消除,如果楼主的测量方法没问题的话,个人感觉电源能做到这个纹波已经相当不错了,你还有什么不满意的?如果你感觉还是不满意的话,可以考虑用增加
-
jadystone
模拟与混合信号
- 请教有没有“STM32”入门更通俗更基础的介绍?
- 看到《带你零起点入门STM32》,开班就唱弄得一头雾水,看来我的起点是负的了!有没有学习STM32所需的知识,工具软件等等的常识性梗概介绍?请教有没有“STM32”入门更通俗更基础的介绍?这个选其中可以接受的看看:https://bbs.eeworld.com.cn/thread-75235-1-1.html有问题可以随时交流回复楼主liweiliang的帖子第一感觉:浩如烟海啊!先硬着头皮看一看!多谢soso!第一感觉:浩如烟海啊!
-
liweiliang
stm32/stm8
- 角度传感器
- 本帖最后由paulhyde于2014-9-1509:08编辑角度传感器n1000060谁有程序或者资料?角度传感器本帖最后由paulhyde于2014-9-1509:08编辑上网买模块。。叫卖家给程序吧~~本帖最后由paulhyde于2014-9-1509:08编辑我也想要哦啊!!!!!!!!!!!!!本帖最后由paulhyde于2014-9-1509:08编辑有程序的童鞋贡献下吧···本帖
-
sonic1007
电子竞赛
- 请高手指点,如何写单430片机的收发程序
- 我用的是TI公司的MSP430G2553,用两个相同的单片机通过串口通信,分别连接在两台电脑上,一个写发送的程序,一个写接收的程序,接收的是一个字符串,最好在接收数据时能让LED灯闪烁,哪位高手能把以前调试成功的程序传给我啊,谢谢啦请高手指点,如何写单430片机的收发程序
-
happyfu87
微控制器 MCU
- 开发wince应用程序大家用什么工具???
- 开发wince应用程序大家用什么工具???EVC还是VC2005或者C#开发wince应用程序大家用什么工具???VS2005下的C#。我还在用EVC不过VS2005也不错``EVC跟VS2005VS2005,EVC我想请教一下,VS2005下的VC和EVC哪个更适合开发wince,C#开发启动速度和对硬件要求有点高我个人认为不适合开发WinceVS2005开发Wince下的运行程序,当然比较好,它支持跨平台使用。为X86开发的应用程序同样可以在ARM上运行,EV
-
xiangshui
WindowsCE
 西门子PLC编程技术及应用案例 (刘振全,王汉芝,杨坤等编著)
西门子PLC编程技术及应用案例 (刘振全,王汉芝,杨坤等编著) 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题


- LR8N3-G 高输入电压线性稳压器的典型应用
- 【CW32】30*30基于CW32的小尺寸大功率航模无刷电调
- ST-Link_V2.1,基于STM32F103CBT6
- DC2279A,用于 LT3088EDD 800 mA 单电阻器坚固型线性稳压器的演示板
- ADR5043B 3V 输出精密微功率可编程电流源的典型应用
- C8051F560DK,C8051F566 8051 MCU 工业应用开发系统
- NX18P3001 用于充电器和 USB-OTG 组合应用的双向高端电源开关的典型应用
- 使用 ColdFire MCF5208 拆分总线架构的系统设计,适用于 1.8V、16 位移动 DDR SDRAM 系统
- ESP通信烧录模块
- STM32扩展版












 京公网安备 11010802033920号
京公网安备 11010802033920号