前言
前面结合“平台总线-设备-驱动”模型分析了ts(触摸)驱动的加载过程,现在进入驱动程序分析下其具体的实现。涉及到输入子系统、s3c2440的ADC转换和触摸控制器。
涉及的寄存器
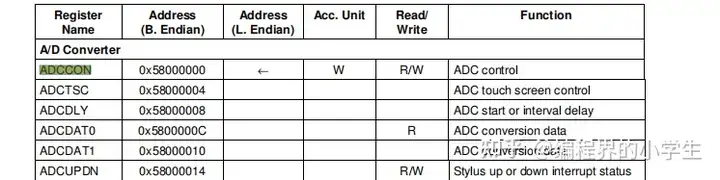
image.png
调用probe函数
根据上一篇的分析,驱动层通过platform_driver_register注册后,会调用到该驱动层的probe函数。

s3c2410ts_probe函数分析
1. 硬件寄存器设置
获取设备参数
struct s3c2410_ts_mach_info *info;
info = ( struct s3c2410_ts_mach_info *)pdev->dev.platform_data;
/*
info
.delay = 10000, // ADC conversion start delay value
.presc = 49, // ADC clk
.oversampling_shift = 2, // 采样精度
*/
if (!info)
{
printk(KERN_ERR "Hm... too bad : no platform data for tsn");
return -EINVAL;
}
使能ADC
adc_clock = clk_get(NULL, "adc");
if (!adc_clock) {
printk(KERN_ERR "failed to get adc clock sourcen");
return -ENOENT;
}
clk_enable(adc_clock);
获取ADC & TOUCH SCREEN 寄存器
static inline void s3c2410_ts_connect(void)
{
s3c2410_gpio_cfgpin(S3C2410_GPG12, S3C2410_GPG12_XMON);
s3c2410_gpio_cfgpin(S3C2410_GPG13, S3C2410_GPG13_nXPON);
s3c2410_gpio_cfgpin(S3C2410_GPG14, S3C2410_GPG14_YMON);
s3c2410_gpio_cfgpin(S3C2410_GPG15, S3C2410_GPG15_nYPON);
}
{
.....
base_addr=ioremap(S3C2410_PA_ADC,0x20); //#define S3C2410_PA_ADC (0x58000000)
if (base_addr == NULL) {
printk(KERN_ERR "Failed to remap register blockn");
return -ENOMEM;
}
/* Configure GPIOs */
s3c2410_ts_connect(); // 设置GPIO功能
.....
}
设置ADC转换频率
if ((info->presc&0xff) > 0)
iowrite32(S3C2410_ADCCON_PRSCEN | S3C2410_ADCCON_PRSCVL(info->presc&0xFF),
base_addr+S3C2410_ADCCON);
// 设置ADC clk
// A/D converter freq = PCLK/(info->presc+1)
// 一次adc转换所需时间Conversion time = 1/(A/D converter freq / 5cycles)
设置ADC转换开始的延时时间
因为ADC中断产生后的一段时间内电压还未稳定,如果立即进行ADC转换,那么转换值会有误差,这时就可以通过设置延时时间,待电压稳定后再执行转换以确保数值的准确性。
// 设置ADC conversion start delay value
if ((info->delay&0xffff) > 0)
iowrite32(info->delay & 0xffff, base_addr+S3C2410_ADCDLY);
进入等待触摸按下模式
iowrite32(WAIT4INT(0), base_addr+S3C2410_ADCTSC); // 等待触摸按下中断模式
自此,ADC & TOUCH SCREEN 寄存器初始设置完成。
2. 注册ADC和TC中断
注册TC中断,监测触摸屏的按下和抬起;注册ADC中断,进行ADC转换。
/* Get irqs */
if (request_irq(IRQ_ADC, stylus_action, IRQF_SAMPLE_RANDOM | SA_SHIRQ,
"s3c2410_action", ts.dev)) {
printk(KERN_ERR "s3c2410_ts.c: Could not allocate ts IRQ_ADC !n");
iounmap(base_addr);
return -EIO;
}
if (request_irq(IRQ_TC, stylus_updown, IRQF_SAMPLE_RANDOM,
"s3c2410_action", ts.dev)) {
printk(KERN_ERR "s3c2410_ts.c: Could not allocate ts IRQ_TC !n");
iounmap(base_addr);
return -EIO;
}
TC中断处理函数 stylus_updown
static irqreturn_t stylus_updown(int irq, void *dev_id)
{
unsigned long data0;
unsigned long data1;
int updown;
// 读取寄存器DATA0和DATA1获取x,y轴的ADC转换值
data0 = ioread32(base_addr+S3C2410_ADCDAT0);
data1 = ioread32(base_addr+S3C2410_ADCDAT1);
// ADCDAT0 bit[15] 0 为按下,1 为松开 即updown 为true 则按下,为false 则松开
updown = (!(data0 & S3C2410_ADCDAT0_UPDOWN)) && (!(data1 & S3C2410_ADCDAT0_UPDOWN));
/* TODO we should never get an interrupt with updown set while
* the timer is running, but maybe we ought to verify that the
* timer isn't running anyways. */
if (updown)
{
// 如果为按下状态
touch_timer_fire(0);
}
return IRQ_HANDLED;
}
ADC中断处理函数 stylus_action
static irqreturn_t stylus_action(int irq, void *dev_id)
{
unsigned long data0;
unsigned long data1;
// if (bADCForTS) {
data0 = ioread32(base_addr+S3C2410_ADCDAT0);
data1 = ioread32(base_addr+S3C2410_ADCDAT1);
ts.xp += data0 & S3C2410_ADCDAT0_XPDATA_MASK; // 为四次adc转换值的累加
ts.yp += data1 & S3C2410_ADCDAT1_YPDATA_MASK; // 为四次adc转换值的累加
ts.count++;
// bADCForTS = 0;
// up(&gADClock);
// ts.count < 4 ,即四次adc转换值为一次按下的结果
if (ts.count < (1< // bADCForTS = 1; iowrite32(S3C2410_ADCTSC_PULL_UP_DISABLE | AUTOPST, base_addr+S3C2410_ADCTSC); // 进入 等待adc 转换模式 iowrite32(ioread32(base_addr+S3C2410_ADCCON) | S3C2410_ADCCON_ENABLE_START, base_addr+S3C2410_ADCCON); // 开启adc转换,转换在info->delay后进行,转换完成后会产生一个ADC中断 // } } else { mod_timer(&touch_timer, jiffies+1); // 启动一个定时器,一个jiffies(系统滴答时间) 后进入定时器处理函数 touch_timer_fire iowrite32(WAIT4INT(1), base_addr+S3C2410_ADCTSC); // 同时等待 触摸抬起中断 } // } return IRQ_HANDLED; } 定时器处理函数 touch_timer_fire static struct timer_list touch_timer = TIMER_INITIALIZER(touch_timer_fire, 0, 0); static void touch_timer_fire(unsigned long data) { unsigned long data0; unsigned long data1; int updown; data0 = ioread32(base_addr+S3C2410_ADCDAT0); data1 = ioread32(base_addr+S3C2410_ADCDAT1); updown = (!(data0 & S3C2410_ADCDAT0_UPDOWN)) && (!(data1 & S3C2410_ADCDAT0_UPDOWN)); // updown 为true 则按下,为false 则松开 if (updown) { // 处于按下状态的处理 // 首次按下 产生了四次ADC转换后,才去处理x,y值 if (ts.count != 0) { long tmp; // 横纵坐标转换 tmp = ts.xp; ts.xp = ts.yp; ts.yp = tmp; ts.xp >>= ts.shift; // 四次adc转换值的平均值为一次按下的结果 ts.yp >>= ts.shift; // 四次adc转换值的平均值为一次按下的结果 #ifdef CONFIG_TOUCHSCREEN_S3C2410_DEBUG { struct timeval tv; do_gettimeofday(&tv); printk(DEBUG_LVL "T: %06d, X: %03ld, Y: %03ldn", (int)tv.tv_usec, ts.xp, ts.yp); } #endif input_report_abs(ts.dev, ABS_X, ts.xp); // 上报x的坐标 input_report_abs(ts.dev, ABS_Y, ts.yp); // 上报y的坐标 input_report_key(ts.dev, BTN_TOUCH, 1); // 上报BIN_TOUCH 按下 input_report_abs(ts.dev, ABS_PRESSURE, 1); // 上报ABS_PRESSURE 按下 input_sync(ts.dev); // 上报事件完成 } ts.xp = 0; ts.yp = 0; ts.count = 0; // if (!down_trylock(&gADClock)) { // bADCForTS = 1; iowrite32(S3C2410_ADCTSC_PULL_UP_DISABLE | AUTOPST, base_addr+S3C2410_ADCTSC); // 进入 等待adc 转换模式 iowrite32(ioread32(base_addr+S3C2410_ADCCON) | S3C2410_ADCCON_ENABLE_START, base_addr+S3C2410_ADCCON); // 开启adc转换,完成后会产生一个ADC中断 // } } else { // 松开的处理 ts.count = 0; input_report_key(ts.dev, BTN_TOUCH, 0); // 上报BIN_TOUCH 松开 input_report_abs(ts.dev, ABS_PRESSURE, 0);// 上报ABS_PRESSURE 松开 input_sync(ts.dev); // 上报事件完成 iowrite32(WAIT4INT(0), base_addr+S3C2410_ADCTSC); // 进入等待触摸按下中断 } } 3. 注册到输入子系统 申请input_dev input_dev = input_allocate_device(); if (!input_dev) { printk(KERN_ERR "Unable to allocate the input device !!n"); return -ENOMEM; } 设置input_dev ts.dev = input_dev; // 设置产生的事件类型,同步类事件、按键类事件和绝对位移事件 ts.dev->evbit[0] = BIT(EV_SYN) | BIT(EV_KEY) | BIT(EV_ABS); // 设置某类事件类型中的具体事件 // 按键类事件中的触摸事件 ts.dev->keybit[LONG(BTN_TOUCH)] = BIT(BTN_TOUCH); // 绝对位移类事件中的ABS_X、ABS_Y、压力值的值范围,0x3ff是该ADC转换器是10bit精度的,最大为0x3fff input_set_abs_params(ts.dev, ABS_X, 0, 0x3FF, 0, 0); input_set_abs_params(ts.dev, ABS_Y, 0, 0x3FF, 0, 0); input_set_abs_params(ts.dev, ABS_PRESSURE, 0, 1, 0, 0); // 只设置有按下和抬起(0,1),没有具体的压力值 ts.dev->private = &ts; ts.dev->name = s3c2410ts_name; ts.dev->id.bustype = BUS_RS232; ts.dev->id.vendor = 0xDEAD;


上一篇:Linux驱动:s3c2410/s3c2440 ts驱动分析 之二
下一篇:linux驱动:s3c2410_ts/s3c2440_ts模块加载流程
推荐阅读最新更新时间:2024-11-02 09:12

 Arduino Uno Windows 驱动
Arduino Uno Windows 驱动 LINUX设备驱动第三版
LINUX设备驱动第三版 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用




设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题


- LTC3642EDD-5 5V、50mA 降压转换器的典型应用电路
- NCV78M08BDTRKG 8V 电流升压稳压器的典型应用
- MAXREFDES1155:基于MAX11410的双通道、RTD/TC测量系统
- 7A单片同步开关稳压器评估板
- 使用 LTC3637EDHC 4V 至 76V 输入至 15V 输出钳位、1A 高效浪涌抑制器的典型应用
- 用于便携式的 1.5V DC 到 DC 单路输出电源
- 【成航PCB赛】音频功率放大电路
- NCP1623PFC150WGEVB:漏极感应 CrM 升压 PFC 150 W 评估板
- 基于STM32F401的7轴3D打印主板V2
- LTC2927,双电源跟踪应用












 京公网安备 11010802033920号
京公网安备 11010802033920号