DWT跟踪组件
跟踪组件:数据观察点与跟踪(DWT)

DWT 中有剩余的计数器,它们典型地用于程序代码的“性能速写”(profiling)。通过编程它们,就可以让它们在计数器溢出时发出事件(以跟踪数据包的形式)。
最典型地,就是使用 CYCCNT寄存器来测量执行某个任务所花的周期数,这也可以用作时间基准相关的目的(操作系统中统计 CPU使用率可以用到它)。
Cortex-M中的DWT
在Cortex-M里面有一个外设叫DWT(Data Watchpoint and Trace),是用于系统调试及跟踪。

它有一个32位的寄存器叫CYCCNT,它是一个向上的计数器,记录的是内核时钟运行的个数,内核时钟跳动一次,该计数器就加1,精度非常高,如果内核时钟是72M,那精度就是1/72M = 14ns,而程序的运行时间都是微秒级别的,所以14ns的精度是远远够的。
最长能记录的时间为:59.65s。计算方法为2的32次方/72000000。
当CYCCNT溢出之后,会清0重新开始向上计数。
使用方法
要实现延时的功能,总共涉及到三个寄存器:DEMCR 、DWT_CTRL、DWT_CYCCNT,分别用于开启DWT功能、开启CYCCNT及获得系统时钟计数值。
DEMCR
想要使能DWT外设,需要由另外的内核调试寄存器DEMCR的位24控制,写1使能(划重点啦,要考试!!)。DEMCR的地址是0xE000 EDFC


关于DWT_CYCCNT
使能DWT_CYCCNT寄存器之前,先清0。让我们看看DWT_CYCCNT的基地址,从ARM-Cortex-M手册中可以看到其基地址是0xE000 1004,复位默认值是0,而且它的类型是可读可写的,我们往0xE000 1004这个地址写0就将DWT_CYCCNT清0了。

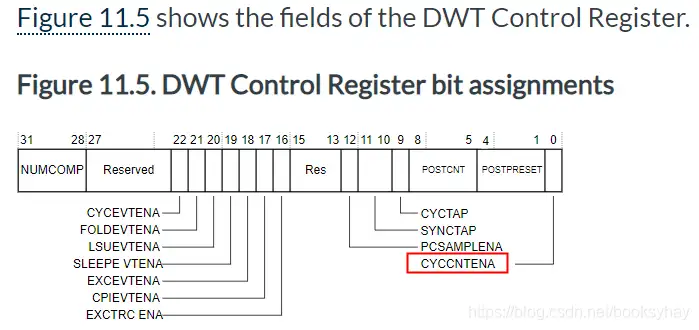
关于CYCCNTENA
CYCCNTENA Enable the CYCCNT counter. If not enabled, the counter does not count and no event is generated for PS sampling or CYCCNTENA. In normal use, the debugger must initialize the CYCCNT counter to 0.
它是DWT控制寄存器的第一位,写1使能,则启用CYCCNT计数器,否则CYCCNT计数器将不会工作。
【https://developer.arm.com/documentation/ddi0337/e/system-debug/dwt/summary-and-description-of-the-dwt-registers?lang=en】
综上所述
想要使用DWT的CYCCNT步骤:
先使能DWT外设,这个由另外内核调试寄存器DEMCR的位24控制,写1使能
使能CYCCNT寄存器之前,先清0。
使能CYCCNT寄存器,这个由DWT的CYCCNTENA 控制,也就是DWT控制寄存器的位0控制,写1使能
寄存器定义:
//0xE000EDFC DEMCR RW Debug Exception and Monitor Control Register.
//使能DWT模块的功能位
#define DEMCR ( *(unsigned int *)0xE000EDFC )
#define TRCENA ( 0x01 << 24) // DEMCR的DWT使能位
//0xE0001000 DWT_CTRL RW The Debug Watchpoint and Trace (DWT) unit
//使能CYCCNT计数器开始计数
#define DWT_CTRL ( *(unsigned int *)0xE0001000 )
#define CYCCNTENA ( 0x01 << 0 ) // DWT的SYCCNT使能位
//0xE0001004 DWT_CYCCNT RW Cycle Count register,
//CYCCNT计数器的内部值(32位无符号)
#define DWT_CYCCNT ( *(unsigned int *)0xE0001004) //显示或设置处理器的周期计数值
用法示例:
vvolatile unsigned int *DWT_CYCCNT ;
volatile unsigned int *DWT_CONTROL ;
volatile unsigned int *SCB_DEMCR ;
void reset_timer(){
DWT_CYCCNT = (int *)0xE0001004; //address of the register
DWT_CONTROL = (int *)0xE0001000; //address of the register
SCB_DEMCR = (int *)0xE000EDFC; //address of the register
*SCB_DEMCR = *SCB_DEMCR | 0x01000000;
*DWT_CYCCNT = 0; // reset the counter
*DWT_CONTROL = 0;
}
void start_timer(){
*DWT_CONTROL = *DWT_CONTROL | 1 ; // enable the counter
}
void stop_timer(){
*DWT_CONTROL = *DWT_CONTROL | 0 ; // disable the counter
}
unsigned int getCycles(){
return *DWT_CYCCNT;
}
main(){
....
reset_timer(); //reset timer
start_timer(); //start timer
//Code to profile
...
myFunction();
...
stop_timer(); //stop timer
numCycles = getCycles(); //read number of cycles
...
}
示例2:
#define start_timer() *((volatile uint32_t*)0xE0001000) = 0x40000001 // Enable CYCCNT register
#define stop_timer() *((volatile uint32_t*)0xE0001000) = 0x40000000 // Disable CYCCNT register
#define get_timer() *((volatile uint32_t*)0xE0001004) // Get value from CYCCNT register
/***********
* How to use:
* uint32_t it1, it2; // start and stop flag
start_timer(); // start the timer.
it1 = get_timer(); // store current cycle-count in a local
// do something
it2 = get_timer() - it1; // Derive the cycle-count difference
stop_timer(); // If timer is not needed any more, stop
print_int(it2); // Display the difference
****/
示例3:
#define DWT_CR *(uint32_t *)0xE0001000
#define DWT_CYCCNT *(uint32_t *)0xE0001004
#define DEM_CR *(uint32_t *)0xE000EDFC
#define DEM_CR_TRCENA (1 << 24)
#define DWT_CR_CYCCNTENA (1 << 0)
/* 初始化时间戳 */
void CPU_TS_TmrInit(void)
{
/* 使能DWT外设 */
DEM_CR |= (uint32_t)DEM_CR_TRCENA;
/* DWT CYCCNT寄存器计数清0 */
DWT_CYCCNT = (uint32_t)0u;
/* 使能Cortex-M3 DWT CYCCNT寄存器 */
DWT_CR |= (uint32_t)DWT_CR_CYCCNTENA;
}
uint32_t OS_TS_GET(void)
{
return ((uint32_t)DWT_CYCCNT);
}
上一篇:为什么有的MCU外接24MHz晶振不能去掉
下一篇:一文详解Arm Cortex-M处理器指令集
推荐阅读最新更新时间:2024-11-09 10:21

推荐帖子
- 请问一个设备的IRP能发到另外一台机器的设备上吗?
- 例如,我在本机的设备上接收到一个READ的IRP,我想把它发到另外一台机的设备上,让这个设备完成再返回结果。请大家帮帮忙,给个方向也好啊请问一个设备的IRP能发到另外一台机器的设备上吗?关键是如何发?一定要用TDI来传输吗?如何传输?调用另一个设备的驱动,调用内核读函数。
-
zxinqiao
 嵌入式系统
嵌入式系统
- ATtiny85迷你小提琴
- 设计和制造迷你小提琴是一种有趣的DIY,可以尝试从头开始构建自己的微控制器开发板。电路原理图电路原理图非常简单。ATtiny85控制两个LED和一个压电蜂鸣器,我还添加了一个用于在歌曲之间切换的按钮。整个电路由3.7V锂电池供电。我希望使PCB尽可能小,以便能够将其用作徽章,因此使用了MLF-20封装微控制器。作为一项附加功能,将小提琴的琴弦连接到微控制器的模拟输入,以便实际上能够通过用导电材料触摸琴弦来演奏小提琴。完整说明参见:https://w
-
dcexpert
DIY/开源硬件专区
- 放大电路频率响应的基本概念
- 1、放大电路的频率响应放大电路的频率响应可直接由放大电路的放大倍数与频率的关系来描述,即上式中——电压放大倍数的幅值与频率的函数关系,称为幅频响应;——放大倍数的相位与频率的函数关系称为相频响应。两者综合起来可全面表征放大电路的频率响应。2、RC耦合放大器的幅频特性RC耦合放大器的幅频特性曲线如图所示。我们将全频域分为三个频区:中频区、高频区、低频区。中频区:在一个较宽的频率范围内
-
qinkaiabc
模拟电子
- 自动调谐算法对线缆、热电制冷器、温度阶跃有何要求?
- 吉时利2510-AT型温度控制源表有哪些方法与技术应用在自动调谐算法中?对线缆、热电制冷器、温度阶跃有何要求呢?线缆对于每个传感引线来说,最大传感引线电阻是1Ω。力引线(forcelead)电阻最大值是0.1Ω。如果引线电阻高于这个最大值,可能造成PID环路不稳定,或者出现明显错误的电压限制指数(Vlim)。这个警告似乎是错误的,因为在温度控制下的输出电压降低于Vlim,但增加的引线IR压降意味着:在距
-
Jack_ma
测试/测量
- g组 电阻桥测电流(简化版)
- 本帖最后由paulhyde于2014-9-1503:33编辑电阻桥测电流(简化版)g组电阻桥测电流(简化版)本帖最后由paulhyde于2014-9-1503:33编辑又是这个东西
-
奋斗了
电子竞赛
- TI三相维也纳PFC解决方案介绍
- TI三相维也纳PFC主要应用在电动汽车的充电器中,所以首先看一下,电动汽车充电器,典型分类和拓扑结构。维也纳整流器是一种流行的有源PFC拓扑结构。具有以下特点:固有的三电平开关,减少电感器尺寸要求,降低开关频率损耗,在输出电压的一半处应力开关,低电磁干扰。这里用TI的TIDM-1000:PFC3PHVIENNA系统做介绍,先看一下这个系统的整体介绍。维也纳整流器设计思想,如下图所示,再看一下,维也纳整流器设计的基本模块,详见下图。
-
alan000345
模拟与混合信号
 usb_host_device_code
usb_host_device_code 自动识别的垃圾清扫车
自动识别的垃圾清扫车 嵌入式实时操作系统的多线程计算-基于ThreadX和ARM
嵌入式实时操作系统的多线程计算-基于ThreadX和ARM 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用




设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题


- NCP130AMX120TCGEVB:NCP130AMX120TCG 偏置轨 LDO 稳压器演示板
- LT3091HDE 连接以实现最佳负载调节的典型应用
- 【课程设计】物联网+540724A
- LT1076HVCT7 负升压转换器的典型应用
- 使用 ON Semiconductor 的 FAN5098 的参考设计
- MPU6050姿态解算STM32源码
- 使用 Analog Devices 的 LTC1740CG 的参考设计
- 使用 Analog Devices 的 LT1253 的参考设计
- 单管放大电路_leslie
- AD9517-2A/PCBZ,AD9517-2A 评估板,2200 MHz 极低噪声 PLL 时钟合成器












 京公网安备 11010802033920号
京公网安备 11010802033920号