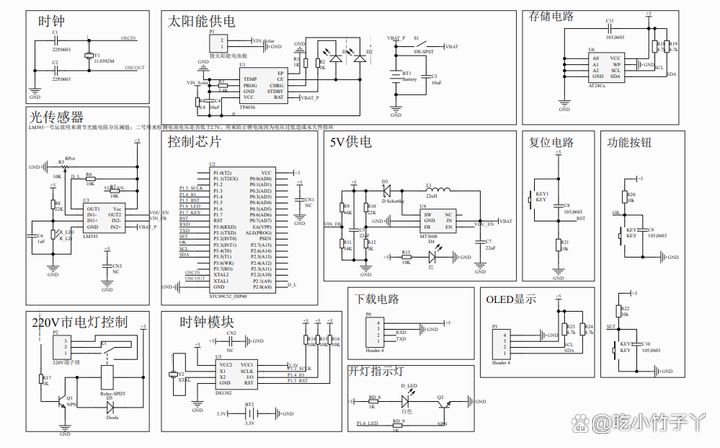
简介:太阳能路灯控制系统:51单片机练手项目,简单可复制。 带太阳能充电功能,oled显示, 白天根据光强判断开关灯晚上开灯,二级菜单可以设置时间日期。 太阳能充电:传统锂电池充电芯片TP4056,使用6V太阳能板,给3.7V18650电池充电。
经过资料显示 18650电池尽量不要让其电压低于2.7V,所以后级供电电路(5V升压电路)MT3608启动引脚EN脚 连接了LM393制成的电压比较器。和电池电压比较,电池电压低于2.7v,MT3608启动脚拉低关断。
供电:使用升压芯片MT3608给单片机供电,让电池电压稳定在5.1V,来提供稳定电压。
#include "reg52.h"
#include "oled.h"
#include "bmp.h"
#include
#include "ds1302.h"
#include "AT24C02.h"
sbit key_s1 = P3^2;//独立按键Set
sbit key_s2 = P3^3;//独立按键Ok
sbit Light_In = P2^0;//光传感器输入端子
sbit Light_Out = P1^6;//亮灯指示灯
sbit Spdt_Out = P1^7;//继电器输出
//串口初始化
u8 Light_flag=0,Show_mode=0;
extern u8 temp[7];
//extern u8 temp_f[7];
void UARTInit()
{
SM0 = 0; SM1 = 1;//串口工作方式1,8位UART波特率可变
TR1 = 1;//启动定时器1
TMOD |= 0x20;//定时器1,工作模式2 8位自动重装
TH1 = 0xfd;
TL1 = 0xfd;//设置比特率9600
}
void Set_Light(){
if(temp[2]>=6&&temp[2]<=23)
{if(Light_In)
{
delay_ms(5);
if(Light_In)
{Light_flag=1;
Light_Out=1;
Spdt_Out=1;
}
}
else
{
Light_flag=0;
Light_Out=0;
Spdt_Out=0;}
}
else {Light_flag=1; Light_Out=1;Spdt_Out=1;}
}
int main(void)
{
u8 set_flag=0,set_ok=0,set_menu=0;
OLED_Init(); //初始化OLED
OLED_Clear(); //OLED清屏
//UARTInit(); //串口初始化
Read_Time();
//DS1302Init(); //DS1302初始化
OLED_ShowString(0,4,"LightMode:",16);
if(Light_flag){OLED_ShowString(80,4,"Open",16);}
else{OLED_ShowString(80,4,"Close",16);}
Light_Out=0;
Spdt_Out=0;
//delay_ms(200);
while(1)
{
if(key_s1 == 0)//判断Set是否被按下
{
delay_ms(2);//按键消抖
上一篇:如何利用MCS-51单片机对周期波频率进行测量
下一篇:采用AT89S52和VC++的实现步进电机实时显示控制系统设计
推荐阅读最新更新时间:2024-11-02 14:30

 【2024 DigiKey创意大赛】环境灯控制系统源码
【2024 DigiKey创意大赛】环境灯控制系统源码 伺服与运动控制系统设计 (田宇编著)
伺服与运动控制系统设计 (田宇编著) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用




设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题


- ADP7182CP-EVALZ,用于评估 ADP7182 低噪声线性稳压器的 LFCSP 评估板
- L5972D DC-DC转换器及开关稳压芯片的典型应用
- SC441A 4串150mA LED高效集成驱动器的典型应用
- PTN5150A-PTN36043 USB Type-C CC逻辑评估套件
- AM2G-4815SZ 15V 2 瓦 DC-DC 转换器的典型应用,用于开/关控制应用
- LTC2209#3CDPBF 演示板,高中频,LVDS 输出,185Msps,16 位 ADC,80MHz < Ain <160MHz
- Protues仿真实例(8051)-8051+Leaf
- LTC1261LIS8-4.5 5V 输入、-4V 输出 GaAs FET 偏置发生器的典型应用电路
- AZ1117E 1.0A LOW DROPOUT LINEAR REGULATOR For Adjustable Version 典型应用
- EVAL-ADG919EBZ,ADG919 (SPST) 评估板是采用 CMOS 工艺的宽带开关












 京公网安备 11010802033920号
京公网安备 11010802033920号