随着电子设计技术的进步和芯片制造工艺水平的提高,16位和32位单片机的使用越来越广泛,但是8位单片机因其制造工艺成熟、价格低廉等特点,仍然在市场上占有相当大的比例,尤其在成本敏感和可靠性要求极高的汽车电子领域,更占用绝对优势,带有外部总线的8位单片机,可以方便地与8位总线设备(如A/D、RAM和CAN总线)相连。随着对传输性能要求的提高,出现了大量的16位总线设备(如网络接口芯片),8位单片机要与16位总线设备相连接,通常的做法是利用I/O端口来模拟16位总线的读/写时序,数据传输速率较低,且原有的8位设备的传输速率也随之降低,因而限制了8位单片机的使用范围,本文提出一种8位单片机扩展16为外部总线的方法,不影响原有8位器件的前提下,可实现对16位总线设备的高速存取;最后,介绍了如何利用该方法与IDE硬盘相连接,并应用于车载数据采集系统。
1 8位/16位总线时序分析
1.1 8位单片机总线时序
带有外部总线的8位单片机有很多,如51系列,AVR系列等,本文以W77E58为例,W77E58是Winbond公司推出的增强型51单片机,工作时钟最高为40M赫兹,在同样的时钟频率下,W77E58指令速度是传统51单片机的3倍;另外,W77E58对程序存储器和数据存储器的寻址能力都为64KB。图1中上半部分为读时序,下半部分为写时序。
 |
|---|
以读数据为例,P0、P2口输出当前地址,ALE的下降沿锁存低8位地址,高8位保持不变;而后,读信号RD使能(低电平),外部设备把数据送到P0口,RD的上升沿把数据读入单片机。写数据与此类似,不过数据方向相反,同时为保证数据能够正确写入外部设备,单片机在写信号WR使能前把数据送到P0口,WR无效后须保持一定时间,从图1中可以看出,单片机用P0口存取8位数据,P2口仅用于地址输出。
1.2 IDE硬盘总线时序
下面以IDE硬盘为例来分析16位总线时序,图2是IDE硬盘的接口示意图[1],只标出了与总线有关的信号线:DIOR/DIOW,读/写;DCS0/DCS1,片选;DD0-DD15,16位数据线;DA0-DA2,3位地址线。
 |
|---|
IDE硬盘是典型的16位总线设备。IDE接口有两个片选信号,DCS1用来寻址控制寄存器。默认状态下即可对IDE硬盘进行存取操作,故一般把该信号线直接连到高电平而只使用DCS0。其时序如图3所示。
 |
|---|
读/写周期开始时DIOR和DIOW均处于无效状态,DA0-DA2连接到主机(在这里为单片机)的地址输出。在收到读请求(DIOR使能)后把数据送至数据线上,主机利用DIOR的上升沿锁存该数据;之后,硬盘控制器延时后释放数据线,在接收写请求时(DIOW使能),则让数据线处于三态(tri-state),等待主机输出数据,最后在DIOW的上升沿把数据写入硬盘控制器,在DIOW上升沿之前,主机需把数据准备好。
对比图1和图3可知,总线时序基本一致,只是在数据线上传输的数据位数不同,但是,主机一条指令完成一个读/写周期,从外部设备到主机的16位数据在指令完成后不再有效;而从主机到外部设备的数据必须在指令完成前准备好,因而要把8位总线扩展成16位总线,必须要同时考虑读/写时数据的锁存问题。
2 16位总线扩展的实现
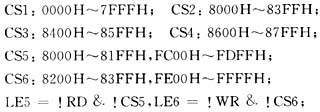
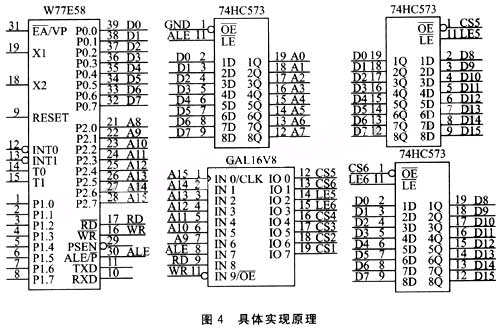
根据前面对总线时序的分析,采用如图4所示的方法对8位总线进行扩展,使其满足16位总线读/写。主要由以下两部分组成:1片GAL16V8(U5),实现片选信号的译码和其他信号的编码;2片74HC573(U3、U4),实现高8位数据锁存。CS1-CS4是A9-A15的译码输出,可连接4个外部设备。地址范围根据具体设备来设定,假设CS2上连接有16位总线设备:
 |
|---|
这里“&”表示“与”,“!”表示“非”,即RD和CS5同时有效时,LE5有效;WR和CS6同时有效时,LE6有效。注意:CS5和CS6有一部分地址空间与CS2重合,即选通CS2的同时,也同时会选通CS5或CS6。另外,通过外部设备地址线的连接,使得8000H-81FFH和8200H-83FFH寻址同一个位置,以图2中的IDE硬盘为例,DA0->A0,DA1->A1,DA2->A2。
单片机写16位数据时,执行写操作使CS6有效(寻址FE00H-FFFFH),输出高8位数据并锁存到U4,然后执行写操作使CS2有效(寻址8200H-83FFH),P0口上的数据和U4锁存的数据同步输出,形成16位数据D0-D15,从而写入外部设备。
单片机读16位数据时,执行读操作使CS2有效(寻址8000H-81FFH),外部设备的低8位送至P0口,而高8位同时被U3锁存,然后执行读操作使CS5有效(寻址FC00H-FDFFH),U3锁存的数据被送至P0口。
在上面的读/写过程中,虽然对CS2的寻址位置不同(读为8000H-81FFH,写为8200H-83FFH),但由于位置重合,故可对16位外部设备正确读/写。另外,如下单片机寻址连接到CS1、CS3、CS4上的8位设备,则由于U3和U4没有选通,对其操作没有任何影响。
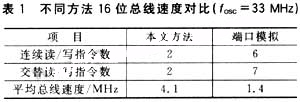
从上面的实现可以看出,扩展后的16位外部总线与外部设备进行数据交互时只增加一条指令。本方法与常规的端口模拟方法的比较结果如表1所列。从表中可以看出,采用本方法后,传输速率是常规方法的3倍。
 |
|---|
另外,上述扩展方法还可以进一步引申:1)若有未使用的I/O口(如W77E58的P1口),则可用来直接输出高8位数据,从而可以去掉图4中的U4;2)若对成本不太敏感,则可把图4中的逻辑器件用CPLD实现,从而使设计更为灵活,布线更为方便,结构更为紧凑,基本实现原理仍然如图4所示。
 |
|---|
3 在车载数据采集系统中的应用
8位单片机扩展16位外部总线的方法已应用于车载数据采集系统,图5为该系统的原理框图。汽车厂商在开发新车型或者关键零部件升级时,必须经过样品试制、产品鉴定、小批试制和大批生产等必要阶段。每个阶段中,都伴随着大量的可靠性试验,车载数据采集系统正是为这些试验而设计的。鉴于其特殊的使用条件,必须满足如下基本要求:能够进行连续、长时间数据采集、时间有可能是几天或者一个月;因为有可能很多台车辆的试验同时进行,因而要求系统成本低且安全可靠,具有CAN总线数据采集接口。在图5中,8位单片机上挂有3个8位总线器件(USB Slave器件,RAM和CAN总线器件)和1个16位总线接口设备(IDE硬盘)。
 |
|---|
单片机采用前面提到的W77E58;为保证较高的数据传输速率,便于与外部串口设备(LCM显示屏)通信,外部晶振频率使用33M赫兹。
USB Slave器件采用PDIUSBD12,使用模块化的方法实现一个USB接口,本次设计通过该器件把IDE硬盘映射成一个可移动硬盘,从而实现了大容量存储类(MassStorage Class)。
RAM采用HY62WT08081E。该器件提供32KB的数据空间,用于数据采集以及FAT32文件系统操作的缓存。
CAN总线接口器件采用SJA1000+TLE6250的组合,SJA1000是独立的CAN控制器,用于汽车和工业环境中的控制器局域网络,TLE6250是针对汽车环境设计的CAN收发器。
IDE硬盘使用经过防震处理的工业用硬盘,也可使用CF卡加IDE转接线的方式。
图6为车载数据采集系统的简要软件流程图。考虑到USB端口和CAN总线上的数据一般不会同时向系统发出请求,故软件采用查询方式工作,主要包括以下几部分:主流程、USB协议实现[2]、CAN总线数据[3]和其他车辆状态信号采集,以及FAT32协议实现。
 |
|---|
4 小结
本设计在8位单片机上实现了16位外部总线,可对16位设备进行高速存取,并且保留了原8位总线的功能,这种8位/16位总线共存的方式,较之端口模拟总线方式,极大地提高了数据的传输速率,该16位总线扩展方式已成功应用于车载数据采集系统,在汽车的道路可靠性试验中,安装了多套该系统,试验结果表明,该系统使用方便,工作稳定、可靠,数据传输率高、完全满足汽车动态采集数据的需要,该16位总线的扩展方式,可应用于具有8位外部总线的单片机,在一定程度上,扩大了该类单片机的使用范围。
上一篇:8位单片机的16位外部总线扩展与应用
下一篇:8位单片机的16位外部总线扩展与应用
推荐阅读最新更新时间:2024-03-16 12:17

 单片机创新实践应用.
单片机创新实践应用. 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用设计资源 培训 开发板 精华推荐
- 【下载】LAT1439 关于STM32H745的MC SDK电机控制工程问题的解决办法
- 【下载】LAT1444 ADC采样中的阻抗匹配计算方法
- 【下载】LAT1446 TrustZone应用中串口通信的DMA传输失败问题
- 【下载】LAT1450 不断电情况下修改RDP选项并生效的解决方案
- 【下载】LAT1455 分辨OEMiROT的Bash与BAT脚本
- 【下载】LAT1457 Keil工程使用NEAI库的异常问题








- CGD和Qorvo将共同革新电机控制解决方案
- 是德科技 FieldFox 手持式分析仪配合 VDI 扩频模块,实现毫米波分析功能
- 贸泽开售可精确测量CO2水平的 英飞凌PASCO2V15 XENSIV PAS CO2 5V传感器
- 玩法进阶,浩亭让您的PCB板端连接达到新高度!
- 长城汽车研发新篇章:固态电池技术引领未来
- 纳芯微提供全场景GaN驱动IC解决方案
- 解读华为固态电池新专利,2030 叫板宁德时代?
- 让纯电/插混车抓狂?中企推全球首款-40℃可放电增混电池,不怕冷
- 智驾域控知多少:中低端车型加速上车,行泊一体方案占主体
- Foresight推出六款先进立体传感器套件 彻底改变工业和汽车3D感知
- 看MPS干货视频,票选最痛EMI问题!
- 开学季!解锁奇楼去充电,玩转幸运大抽奖~抽不中再抽
- 有奖直播|瑞萨电子 RA 系列产品开发工具之 FSP4.0.0 新特性介绍
- TI有奖直播|如何进行更加快速、简单且成本更低的AI 摄像头应用的开发
- 有奖直播|多款MSP430™片上Sigma-Delta ADC助力高精度信号检测应用 报名中
- 金秋十月,我们跟金尔雅老师学MSP432
- TI 中国大学计划20周年官网“幸运雨”了,你还不来抢?
- 恩智浦无线MCU应用征集+100套开发套件申请
- 阅读并了解是德科技汽车电子、物联网(IOT) 精彩专题,答题赢好礼!
- 有奖直播|相约Keysight World 2019“汽车电子及新能源汽车测试”论坛




 京公网安备 11010802033920号
京公网安备 11010802033920号