多轴惯性传感器已日益受到医疗应用市场青睐。融合多轴感测功能的惯性MEMS元件,不论尺寸、功耗、精准度与可靠性均有优异表现,可符合医疗应用领域的严苛要求,如手术导航工具等精密医疗仪器,皆已开始大量导入。
导航与汽车、卡车、飞机、轮船及人相关。然而,它也开始在医疗技术领域发挥重要作用,精密手术仪器和机器人即须使用导航。手术导航工具的设计要求与传统的车辆导航具有广泛的共同点,但前者也提出一些独特的挑战,如在室内使用,无法获得全球卫星定位系统(GPS)支援,因而需要更高性能。
本文将研究医疗导航应用的独特挑战,并探讨从感测器机制到系统特性可能的解决方案,并介绍增强感测性能的方法,如采用卡尔曼滤波等。
多轴MEMS传感器转化医疗资讯
微机电系统(MEMS)已成为大多数人每天都会碰到的成熟技术,它使汽车更安全、增强手机可用性,并能优化工具及运动设备的性能,从而提高对病人的医疗护理水准。
用于线性运动检测的MEMS元件通常是基于一个微加工的多晶矽表面结构,该结构形成于矽晶圆之上,通过多晶矽弹簧悬挂在晶圆的表面上,提供对加速度力的阻力。在加速度下,MEMS轴的偏转由一个差分电容测量,该差分电容由独立固定板和活动品质连接板组成。如此一来,运动使差分电容失衡,导致感测器输出的幅度与加速度成正比。
例如汽车因碰撞而突然急剧减速时,安全气囊感测器中的MEMS轴会产生同样的运动,使得电容失衡,最终产生讯号触发安全气囊打开。此一基本加速度计结构,根据不同的应用性能参数进行调整,并增加资料处理功能后,可以精确地指示倾斜度、速度甚至位置。另有一种技术上相关的结构是陀螺仪,它能检测旋转速率,输出形式为度/秒。
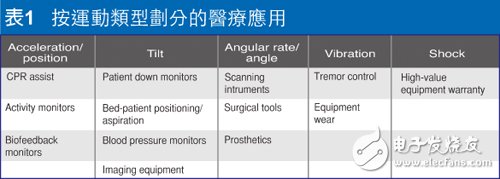
透过一个耗电量极低的微型元件,以精确检测和测量运动的能力,几乎对任何涉及运动的应用都具价值,表1即按运动类型列出基本医疗应用。
尽管简单的运动检测有价值,如一个轴上的线性运动,但多数应用皆涉及到多个轴上的多种类型运动。捕捉这种多维运动状态不仅能带来新的好处,且能在轴外扰动可能影响单主轴运动测量的情况下,保持精度。
为精确测量物件所经历的运动,必须将多种类型(如线性和旋转)的感测器结合起来,如加速度计对地球的重力敏感,可用来确定倾角。换言之,让一个MEMS加速度计在一个±1g重力场中旋转时(±90度),它能够将该运动转换为角度表示。
然而,加速度计无法区分静态加速度(重力)与动态加速度。因此,加速度计可与陀螺仪结合,利用组合元件的附加资料处理能力,可分辨线性加速度与倾斜(即当陀螺仪的输出显示旋转与加速度计记录的明显倾斜重合时)。随着系统的动态程度(运动的轴数和运动自由度)增加,感测器融合过程会变得更加复杂。
了解环境对感测器精度的影响也很重要。显而易见的一个因素是温度,可对其进行校准。事实上,高精度感测器可以重新校准,并自身进行动态补偿。另一个不那么明显的考虑因素是潜在的振动,即使很轻微的振动也会使旋转速率感测器的精度发生偏移,这种效应称为线性加速度效应和振动校正,其影响可能很严重,具体取决于陀螺仪的品质。在此种情况下,感测器融合同样能够提高性能,即利用加速度计来检测线性加速度,然后利用此资讯和陀螺仪线性加速度灵敏度的校准资讯进行校正。
惯性感测器助阵医疗导航崭露头角
许多应用要求多自由度的运动检测,如六轴自由度惯性感测器能够同时检测x、y、z轴上的线性加速度和旋转运动(也称为滚动、俯仰和偏航)。
惯性感测器在工业中用作辅助导航元件已经相当广泛,通常惯性感测器与GPS等其他导航设备一起使用。当GPS连结不可靠时,惯性导航可利用航位推算技术强化。
除最简单的导航之外,多数解决方案都会依赖多种类型的感测器,在所有条件下提供所需的精度和性能。GPS、光学和磁性检测技术已广为认知,相关产品也很丰富,然而,每种技术都有其不足之处,即使一起使用,互相之间也不能完全补偿彼此的不精确性。MEMS惯性感测器则有可能完全补偿感测器的不精确性,因为它不存在上述干扰,且不需要外部基础结构:无需卫星、磁场或相机,只需惯性。表2列出主要的导航感测器技术及其优缺点。

就像车辆导航设备会发生GPS遮挡问题一样,医疗系统所用的光学导航技术也会遇到视线遮挡问题。发生光学遮挡时,惯性感测器可以执行航位推算,从而通过冗余检测增强系统的可靠性。
符合表2所列原则的一个医疗应用是在手术室使用惯性感测器,使人工膝关节或髋关节能够与病人独特的骨骼结构更精确地对准。本例的目标是让植入体与患者自然轴的对准误差小于1度。95%以上的全膝关节置换(TKA)手术,采用机械对准方法,它所产生的典型误差为3度或更大。
使用光学对准的电脑辅助方法已开始取代一些机械程式,但可能由于设备开销较大,推广过程缓慢。无论使用机械对准还是光学对准,这些手术中约30%都会有未对准的情况(定义为3度以上的误差),使病人感觉不舒服,常常须要进行额外的手术。降低对准误差的可能好处,包括缩短手术时间、增强病人舒适感及使关节置换效果更持久。
完整多轴惯性测量单元(IMU)形式的惯性感测器,已证明能够显著提高TKA手术的精度。基于MEMS的惯性感测单元包含所需的全部检测功能,包括三个线性感测器和三个旋转感测器,可取代基于机械和光学的对准技术。该元件利用多种类型的感测器和嵌入式处理来动态校正感测器漂移,如陀螺仪的线性加速度偏移、线性和旋转检测的温度漂移等。通过标准四线串列周边介面(SPI),可以与这个相对复杂的精密感测器套件轻松连接。
MEMS惯性感测器可靠度高(汽车行业20年的应用历史证明此点),它在手机和视频游戏中的成功应用,说明它极具吸引力。然而,不同应用对性能的要求大不相同,适合游戏的元件并不能解决本文所述的高性能导航问题。对于导航,重要的MEMS性能指标是偏置漂移、振动影响、灵敏度和杂讯。精密工业和医疗导航所需的性能水准,通常比消费电子设备所用MEMS感测器的性能水准高出一个数量级。表3列出有助于挑选感测器的一般系统考虑。
大多数系统都会整合某种形式的卡尔曼滤波器,以便有效合并多种类型的感测器。卡尔曼滤波器将系统动力学模型、感测器相对精度和其他特定应用的控制输入纳入考虑,有效确定最切合实际的运动情况。高精度惯性感测器(低杂讯、低漂移、相对温度/时间/振动/电源变化保持稳定)可降低卡尔曼滤波器的复杂度,减少所需冗余感测器的数量,以及减少对容许系统工作方案的限制条件数量。
医疗应用复杂度高MEMS技术持续演进
虽然感测器已实现各种各样的医疗应用,从相对简单的运动捕捉到复杂的运动分析,但医用感测器的高性能要求提出复杂且涉及到大量计算的设计挑战。所幸,解决这些新一代医疗挑战所需的许多原理均基于经工业导航应用验证的方法,包括感测器融合和处理技术。在医疗导航领域,运动的复杂性以及精度和可靠性要求,将推动多处理器、附加感测器后处理、复杂演算法、复杂测试和补偿方案的发展。
在消费应用强烈追求小尺寸、低功耗、多轴惯性感测器的同时,某些开发人员同样重视能够在各种环境条件下,稳定可靠的高精度、低功耗、高性能感测器。与现有测量和检测技术相比,这些惯性MEMS元件在精度、尺寸、功耗、冗余度和可及性能均有优势。
上一篇:集成化智能化,MEMS传感器前景广阔
下一篇:DARPA正在研制六轴惯性导航芯片,可用于军用GPS备援
推荐阅读最新更新时间:2023-10-12 20:53

 机电一体化技术 (刘宏新主编)
机电一体化技术 (刘宏新主编) 物联网传感器技术与应用 by 黄玉兰
物联网传感器技术与应用 by 黄玉兰 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用









 京公网安备 11010802033920号
京公网安备 11010802033920号