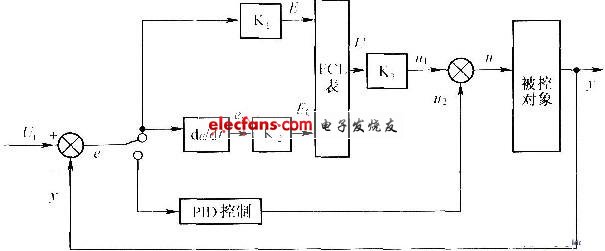
由于电网的波动以及周边负荷的变化,充电电流会出现跃变.自动充放电控制器的调节功能是使充电电流或电压稳定.阀控密封铅酸蓄电池在深放电后充电,开始阶段其内阻较大,随着充电电压的升高,内阻减小,即使电网中很小的电压波动也会引起充电电流较大的波动.这就要求充电控制器的调节速度要快,不然会引起跳闸,甚至损坏整流电路.对阀控密封铅酸蓄电池充放电过程的控制可以采用上图所示的混合型模糊PID控制器.
上一篇:无源再生式软开关Boost变换器
下一篇:基于MAXl660的镍氢电池充放电电路
推荐阅读最新更新时间:2023-10-13 10:59
制作一个带有PID控制器的线跟随机器人
如果你想要制作一个遵循黑线行动的酷机器人。大概只需要在 2 小时内学习并制作就能够完成带有 D 控制器的线跟随器机器人。
大多数漫游车自主机器人需要的一项功能是线路跟踪。该项目的目的是构建一个线跟随机器人,并以一种有趣的方式开始学习 PID 控制器。
构建
机器人与两个、Rosbot 底板和一个 5 通道一起正常工作。与其他产品不同,您无需购买额外的 H 桥或各种组件,因为 Rosbot 具有内置的 2x H 桥双驱动器。只需将电机连接到 Rosbot 基板,它将提供比 Uno 更多的电力。
机器人框架: KitnBot 阳极铝底盘
酷酷且坚固的底盘,带有大量安装孔(4.8 毫米乐高机械组),您绝对
[机器人]
适用型PID控制器参数整定性能比较
摘要: 基于蒙特卡罗实验原理,提出了一种针对适应型PID控制器的参数整定比较方法。对于若干典型热工对象,利用所提出的方法,研究了Xiegler-Nichols方法、Chien-Hrones-Reswick方法、Cohen-Coon方法、IMC方法、IST2E最优方法、极点配置方法、幅值相位裕量方法所设计的适应型PID控制系统的性能比较问题。
关键词: PID参数整定
自适应控制 蒙特卡罗方法
在控制理论和技术飞速发展的今天,PID控制由于其具有控制方法简单、稳定性好、可靠性高和易于现场调试等优点,被广泛应用于工业过程控制。在实际过程中,被控过程经常存在时变不确定性的特点,自适应PID控制是
[传感技术]
基于三菱FX2N的增量式PID控制器设计
在工业生产中,常需要采用闭环控制方式来控制温度、压力、流量等连续变化的模拟量。无论是使用模拟控制器的模拟控制系统,还是使用计算机的数字控制系统,PID控制器都得到了广泛的应用。这是因为这种方法不需要精确的控制系统数学模型,有较强的灵活性和适应性。但是在数字PLC控制系统中,普通的 PID算法对所有过去状态存在依赖性,从而引起系统较大的超调,使系统稳定性下降。增量式PID控制算法每次输出只输出控制增量,必要时可通过逻辑判断限制故障时的输出,从而降低了因机器故障导致PID误输出给系统带来严重后果的影响。
在实际系统中,PLC控制模拟量可采用PLC自带的PID过程控制模块,但对要求比较高的场合采用改进的PID控制算法
[工业控制]
 电气控制与西门子S7-300PLC编程技术
电气控制与西门子S7-300PLC编程技术 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用










 京公网安备 11010802033920号
京公网安备 11010802033920号