


干货 | 什么是PID控制?看完秒懂!
最新更新时间:2021-09-02 06:32
阅读数:

在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器是应用最为广泛的一种自动控制器。它具有原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单等优点;而且在理论上可以证明,对于过程控制的典型对象──“一阶滞后+纯滞后”与“二阶滞后+纯滞后”的控制对象,PID控制器是一种最优控制。PID调节规律是连续系统动态品质校正的一种有效方法,它的参数整定方式简便,结构改变灵活(PI、PD、…)。
01
PID是闭环控制算法
因此要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上,下面也将以转速控制为例。
PID是比例(P)、积分(I)、微分(D)控制算法
但并不是必须同时具备这三种算法,也可以是PD,PI,甚至只有P算法控制。我以前对于闭环控制的一个最朴素的想法就只有P控制,将当前结果反馈回来,再与目标相减,为正的话,就减速,为负的话就加速。现在知道这只是最简单的闭环控制算法。
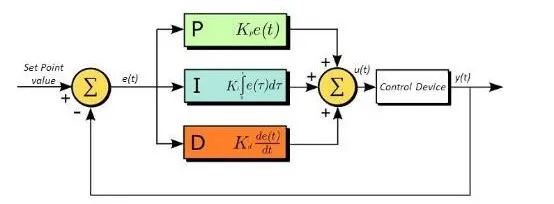
PID控制器结构
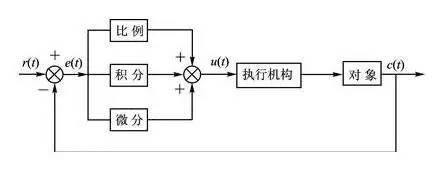
PID控制系统原理结构框图
对偏差信号进行比例、积分和微分运算变换后形成一种控制规律。“利用偏差,纠正偏差”。
模拟PID控制器
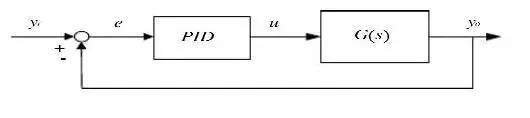
模拟PID控制器结构图
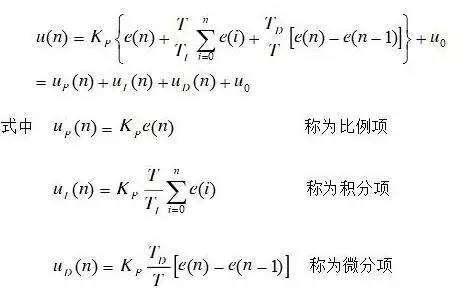
PID控制器的输入输出关系为:
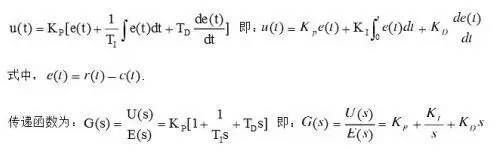
比例(P)、积分(I)、微分(D)控制算法各有作用
比例,反应系统的基本(当前)偏差e(t),系数大,可以加快调节,减小误差,但过大的比例使系统稳定性下降,甚至造成系统不稳定;
积分,反应系统的累计偏差,使系统消除稳态误差,提高无差度,因为有误差,积分调节就进行,直至无误差;
微分,反映系统偏差信号的变化率e(t)-e(t-1),具有预见性,能预见偏差变化的趋势,产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的动态性能。但是微分对噪声干扰有放大作用,加强微分对系统抗干扰不利。 积分和微分都不能单独起作用,必须与比例控制配合。
02
控制器的P,I,D项选择
下面将常用的各种控制规律的控制特点简单归纳一下:
(1) 比例控制规律P:采用P控制规律能较快地克服扰动的影响,它的作用于输出值较快,但不能很好稳定在一个理想的数值,不良的结果是虽较能有效的克服扰动的影响,但有余差出现。它适用于控制通道滞后较小、负荷变化不大、控制要求不高、被控参数允许在一定范围内有余差的场合。如:金彪公用工程部下设的水泵房冷、热水池水位控制;油泵房中间油罐油位控制等。
(2) 比例积分控制规律(PI):在工程中比例积分控制规律是应用最广泛的一种控制规律。积分能在比例的基础上消除余差,它适用于控制通道滞后较小、负荷变化不大、被控参数不允许有余差的场合。如:在主线窑头重油换向室中F1401到F1419号枪的重油流量控制系统;油泵房供油管流量控制系统;退火窑各区温度调节系统等。
(3) 比例微分控制规律(PD):微分具有超前作用,对于具有容量滞后的控制通道,引入微分参与控制,在微分项设置得当的情况下,对于提高系统的动态性能指标,有着显著效果。因此,对于控制通道的时间常数或容量滞后较大的场合,为了提高系统的稳定性,减小动态偏差等可选用比例微分控制规律。如:加热型温度控制、成分控制。需要说明一点,对于那些纯滞后较大的区域里,微分项是无能为力,而在测量信号有噪声或周期性振动的系统,则也不宜采用微分控制。如:大窑玻璃液位的控制。
(4) 例积分微分控制规律(PID):PID控制规律是一种较理想的控制规律,它在比例的基础上引入积分,可以消除余差,再加入微分作用,又能提高系统的稳定性。它适用于控制通道时间常数或容量滞后较大、控制要求较高的场合。如温度控制、成分控制等。
鉴于D规律的作用,我们还必须了解时间滞后的概念,时间滞后包括容量滞后与纯滞后。其中容量滞后通常又包括:测量滞后和传送滞后。测量滞后是检测元件在检测时需要建立一种平衡,如热电偶、热电阻、压力等响应较慢产生的一种滞后。而传送滞后则是在传感器、变送器、执行机构等设备产生的一种控制滞后。纯滞后是相对与测量滞后的,在工业上,大多的纯滞后是由于物料传输所致,如:大窑玻璃液位,在投料机动作到核子液位仪检测需要很长的一段时间。
总之,控制规律的选用要根据过程特性和工艺要求来选取,决不是说PID控制规律在任何情况下都具有较好的控制性能,不分场合都采用是不明智的。如果这样做,只会给其它工作增加复杂性,并给参数整定带来困难。当采用PID控制器还达不到工艺要求,则需要考虑其它的控制方案。如串级控制、前馈控制、大滞后控制等。
Kp,Ti,Td三个参数的设定是PID控制算法的关键问题。一般说来编程时只能设定他们的大概数值,并在系统运行时通过反复调试来确定最佳值。因此调试阶段程序须得能随时修改和记忆这三个参数。
03
数字PID控制器
(1) 模拟PID控制规律的离散化
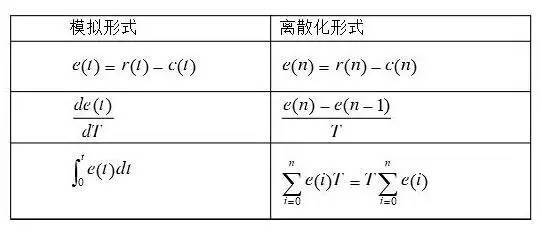
(2) 数字PID控制器的差分方程
04
参数的自整定
在某些应用场合,比如通用仪表行业,系统的工作对象是不确定的,不同的对象就得采用不同的参数值,没法为用户设定参数,就引入参数自整定的概念。实质就是在首次使用时,通过N次测量为新的工作对象寻找一套参数,并记忆下来作为以后工作的依据。具体的整定方法有三种:临界比例度法、衰减曲线法、经验法。
1、临界比例度法(Ziegler-Nichols)
1.1 在纯比例作用下,逐渐增加增益至产生等副震荡,根据临界增益和临界周期参数得出PID控制器参数,步骤如下:
① 将纯比例控制器接入到闭环控制系统中(设置控制器参数积分时间常数Ti =∞,实际微分时间常数Td =0)。
② 控制器比例增益K设置为最小,加入阶跃扰动(一般是改变控制器的给定值),观察被调量的阶跃响应曲线。
③ 由小到大改变比例增益K,直到闭环系统出现振荡。
④ 系统出现持续等幅振荡时,此时的增益为临界增益(Ku),振荡周期(波峰间的时间)为临界周期(Tu)。
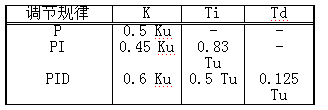
⑤ 由表1得出PID控制器参数。
表1:
1.2 采用临界比例度法整定时应注意以下几点:
① 在采用这种方法获取等幅振荡曲线时,应使控制系统工作在线性区,不要使控制阀出现开、关的极端状态,否则得到的持续振荡曲线可能是“极限循环”,从线性系统概念上说系统早已处于发散振荡了。
② 由于被控对象特性的不同,按上表求得的控制器参数不一定都能获得满意的结果。对于无自平衡特性的对象,用临界比例度法求得的控制器参数往住使系统响应的衰减率偏大(ψ>0.75 )。而对于有自平衡特性的高阶等容对象,用此法整定控制器参数时系统响应衰减率大多偏小(ψ<0.75 )。为此,上述求得的控制器参数,应针对具体系统在实际运行过程中进行在线校正。
③ 临界比例度法适用于临界振幅不大、振荡周期较长的过程控制系统,但有些系统从安全性考虑不允许进行稳定边界试验,如锅炉汽包水位控制系统。还有某些时间常数较大的单容对象,用纯比例控制时系统始终是稳定的,对于这些系统也是无法用临界比例度法来进行参数整定的。
④ 只适用于二阶以上的高阶对象,或一阶加纯滞后的对象,否则,在纯比例控制情况下,系统不会出现等幅振荡。
1.3 若求出被控对象的静态放大倍数KP=△y/△u ,则增益乘积KpKu可视为系统的最大开环增益。通常认为Ziegler-Nichols闭环试验整定法的适用范围为:
① 当KpKu > 20时,应采用更为复杂的控制算法,以求较好的调节效果。
② 当KpKu < 2时,应使用一些能补偿传输迟延的控制策略。
③ 当1.5
④ 当KpKu< 1.5时,在对控制精度要求不高的场合仍可使用PI控制器,在这种情况下,微分作用已意义不大。
2、衰减曲线法
衰减曲线法与临界比例度法不同的是,闭环设定值扰动试验采用衰减振荡(通常为4:1或10:l),然后利用衰减振荡的试验数据,根据经验公式求取控制器的整定参数。整定步骤如下:
(1) 在纯比例控制器下,置比例增益K为较小值,并将系统投入运行。
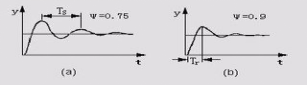
(2) 系统稳定后,作设定值阶跃扰动,观察系统的响应,若系统响应衰减太快,则减小比例增益K;反之,应增大比例增益K。直到系统出现如图1(a)所示的4:1衰减振荡过程,记下此时的比例增益Ks及和振荡周期Ts数值。
图1:
(3) 利用Ks和Ts值,按表2给出的经验公式,计算出控制器的参数整定值。
表2
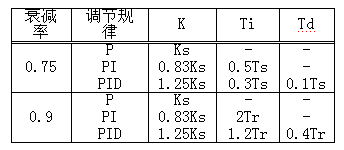
(4)10:1衰减曲线法类似,只是用Tr带入计算。
采用衰减曲线法必须注意几点:
(1) 加给定干扰不能太大,要根据生产操作要求来定,一般在5%左右,也有例外的情况。
(2) 必须在工艺参数稳定的情况下才能加给定干扰,否则得不到正确得 整定参数。
(3) 对于反应快的系统,如流量、管道压力和小容量的液位调节等,要得到严格的4:1衰减曲线较困难,一般以被调参数来回波动两次达到稳定,就近似地认为达到4:1衰减过程了。
(4) 投运时,先将K放在较小的数值,把Ti减少到整定值,把Td逐步放大到整定值,然后把K拉到整定值(如果在K=整定值的条件下很快地把Td放到整定值,控制器的输出会剧烈变化)。
3、经验整定法
3.1方法一A:
① 确定比例增益
使PID为纯比例调节,输入设定为系统允许最大值的60%~70%,由0逐渐加大比例增益至系统出现振荡;再反过来,从此时的比例增益逐渐减小至系统振荡消失,记录此时的比例增益,设定PID的比例增益P为当前值的60%~70%。
② 确定积分时间常数
比例增益P确定后,设定一个较大的积分时间常数Ti的初值,然后逐渐减小Ti至系统出现振荡,之后在反过来,逐渐加大Ti至系统振荡消失。记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。
③ 确定积分时间常数Td
积分时间常数Td一般不用设定,为0即可。若要设定,与确定 P和Ti的方法相同,取不振荡时的30%。
④ 系统带载联调,再对PID参数进行微调,直至满足要求。
3.2方法一B:
① PI调节
a、纯比例作用下,把比例度从较大数值逐渐往下降,至开始产生周期振荡(测量值以给定值为中心作有规则得振荡),在产生周期性振荡得情况下,把此比例度逐渐加宽直至系统充分稳定。
b、接下来把积分时间逐渐缩短至产生振荡,此时表示积分时间过短,应把积分时间稍加延长,直至振荡停止。
② PID调节
a、纯比例作用下寻求起振点。
b、加大微分时间使振荡停止,接着把比例度调得稍小一些,使振荡又产生,加大微分时间,使振荡再停止,来回这样操作,直至虽加大微分时间,但不能使振荡停止,求得微分时间的最佳值,此时把比例度调得稍大一些直至振荡停止。
c、把积分时间调成和微分时间相同的数值,如果又产生振荡则加大积分时间直至振荡停止。
3.3方法二:
另一种方法是先从表列范围内取Ti的某个数值,如果需要微分,则取Td=(1/3~1/4)Ti,然后对δ进行试凑,也能较快地达到要求。实践证明,在一定范围内适当地组合δ和Ti的数值,可以得到同样衰减比的曲线,就是说,δ的减少,可以用增加Ti的办法来补偿,而基本上不影响调节过程的质量。所以,这种情况,先确定Ti、Td再确定δ的顺序也是可以的。而且可能更快些。如果曲线仍然不理想,可用Ti、Td再加以适当调整。
3.4方法三:
① 在实际调试中,也可以先大致设定一个经验值,然后根据调节效果修改。
- 流量系统:P(%)40--100,I(分)0.1--1
- 压力系统:P(%)30--70, I(分)0.4--3
- 液位系统:P(%)20--80, I(分)1—5
- 温度系统:P(%)20--60, I(分)3--10,D(分)0.5--3
② 以下整定的口诀:
阶跃扰动投闭环,参数整定看曲线;先投比例后积分,最后再把微分加;
理想曲线两个波,振幅衰减4比1;比例太强要振荡,积分太强过程长;
动差太大加微分,频率太快微分降;偏离定值回复慢,积分作用再加强。
4、复杂调节系统的参数整定
以串级调节系统为例来说明复杂调节系统的参数整定方法。由于串级调节系统中,有主、副两组参数,各通道及回路间存在着相互联系和影响。改变主、副回路的任一参数,对整个系统都有影响。特别是主、副对象时间常数相差不大时,动态联系密切,整定参数的工作尤其困难。
在整定参数前,先要明确串级调节系统的设计目的。如果主要是保证主参数的调节质量,对副参数要求不高,则整定工作就比较容易;如果主、副参数都要求高,整定工作就比较复杂。下面介绍“先副后主”两步参数整定法。
第一步:在工况稳定情况下,将主回路闭合,把主控制器比例度放在100%,积分时间放在最大,微分时间放在零。用4:1衰减曲线整定副回路,求出副回路得比例增益K2s和振荡周期T2s。
第二步:把副回路看成是主回路的一个环节,使用4:1衰减曲线法整定主回路,求得主控制器K1s和T1s。
根据K1s、K2s、T1s、T2s按表2经验公式算出串级调节系统主、副回路参数。先放上副回路参数,再放上主回路参数,如果得到满意的过渡过程,则整定工作完毕。否则可进行适当调整。
如果主、副对象时间常数相差不大,按4:1衰减曲线法整定,可能出现“共振”危险,这时,可适当减小副回路比例度或积分时间,以达到减少副回路振荡周期的目的。同理,加大主回路比例度或积分时间,以期增大主回路振荡周期,使主、副回路振荡周期之比加大,避免“共振”。这样做的结果会降低调节质量。
如果主、副对象特性太相近,则说明确定的方案欠妥当,就不能完全依靠参数整定来提高调节质量了。
05
实际应用体会
一是利用数字PID控制算法调节直流电机的速度,方案是采用光电开关来获得电机的转动产生的脉冲信号,单片机(MSP430G2553)通过测量脉冲信号的频率来计算电机的转速(具体测量频率的算法是采用直接测量法,定时1s测量脉冲有多少个,本身的测量误差可以有0.5转加减),测量的转速同给定的转速进行比较产生误差信号,来产生控制信号,控制信号是通过PWM调整占空比也就是调整输出模拟电压来控制的(相当于1位的DA,如果用10位的DA来进行模拟调整呢?效果会不会好很多?),这个实验控制能力有一定的范围,只能在30转/秒和150转/秒之间进行控制,当给定值(程序中给定的速度)高于150时,实际速度只能保持在150转,这也就是此系统的最大控制能力,当给定值低于30转时,直流电机转轴实际是不转动的,但由于误差值过大,转速会迅速变高,然后又会停止转动,就这样循环往复,不能达到控制效果。
根据实测,转速稳态精度在正负3转以内,控制时间为4到5秒。实验只进行到这种程度,思考和分析也只停留在这种深度。
两次体会都不是特别清楚PID参数是如何整定的,没有特别清晰的理论指导和实验步骤,对结果的整理和分析也不够及时,导致实验深度和程度都不能达到理想效果。
EEWorld“搜器件”小程序上线啦!

千万级器件数据随手查 文档在线实时浏览
免费下载轻松便捷 常用器件一件收藏


免责声明:本文系网络转载,版权归原作者所有。如本文所用视频、图片、文字如涉及作品版权问题,请在文末留言告知,我们将在第一时间处理!本文内容为原作者观点,并不代表本公众号赞同其观点和对其真实性负责。


由于微信公众号近期改变了推送规则,如果您想经常看到我们的文章,可以在每次阅读后,在页面下方点一个「赞」或「在看」,这样每次推送的文章才会第一时间出现在您的订阅列表里。
或将我们的公众号设为星标。进入公众号主页后点击右上角「三个小点」,点击「设为星标」,我们公众号名称旁边就会出现一个黄色的五角星(Android 和 iOS 用户操作相同)。

聚焦行业热点, 了解最新前沿
敬请关注EEWorld电子头条
https://www.eeworld.com.cn/mp/wap
复制此链接至浏览器或长按下方二维码浏览

以下微信公众号均属于
EEWorld(www.eeworld.com.cn)
欢迎长按二维码关注!
EEWorld订阅号:电子工程世界

EEWorld服务号:电子工程世界福利社
推荐帖子
- IAR .a文件的格式如何解析
- 最近在尝试做一件事。直接把库编译出来得到的.a文件,从中提取出函数编译好以后的内容,然后直接写在MCU的内部FLASH上,以存储的地址作为该函数的引用地址。但是,打开.a文件,发现里面有很多其他无效内容,但不知道从何找到它的格式解析。不知道各位大神有何高见?用的是iarforarmIAR.a文件的格式如何解析7z直接解压缩,然后应该会看到一大堆.o .o?这个我也看到,但不知道如何解析出可以用的数据
-
辛昕
 编程基础
编程基础
- 请问各位大神,STM32F103ZET6和STM32F103VET6的区别?
- 小弟最近想学习stm32,手上有一块学长留下来的STM32F103VET6的开发板,但是我现有的资料是STM32F103ZET6的资料,我不知道这样学习会不会错了,图片中的开发板的芯片就是STM32F103VET6,跟我网上找到的是《ALIENTEK战舰STM32开发板》的资料,里面说芯片是STM32F103ZET6,所以前来请教各位打神请问各位大神,STM32F103ZET6和STM32F103VET6的区别?管脚都是兼容的,只要管脚对,大部分都是通用的
-
我是小帅
ARM技术
- 求解:ADC采样序列
- 用群星的驱动库写ADC时遇到不理解的东西,在配置序列采样发生器时有个需要配置的量——“步进数”。数据手册中说,“配置的步进决定了触发产生ADC捕获采样序列的次序”。这里的次序是什么意思?比如说我配置了步进数为2,那这是说这里配置的步进序列使用了通道2?还是说,这个序列中有许多采样的时间点,取第二个点进行采样?本人菜鸟,求助……;P;P求解:ADC采样序列你现在能给我解释一下吗?
-
anathema
嵌入式系统
- 静电放电抗扰度测试方案-EMS测试系统
- 静电放电是普遍存在的自然现象(当充有电荷的物体靠近或接触一个导体时,电荷就要发生转移,这就是静电放电)。无处不在的影响着电子产品,是一种危害程度极高的电磁能量。只有提高电子产品抗静电能力水平,才能保证电子的安全使用。电子静电抗扰度测试根据ISO10605GB/T19951-2005执行一般常说的静电放电测试是指IEC61000-4-2标准。静电放电的实验主要模拟的人体带电直接接触被试物品,所进行的放电,静电放电测试使用静电放电模拟器进行测试。静电放电试验有两种方式:一种是接触放电方法,另
-
bjhyyq
工控电子
- NECD78F1023资料 大赛可能会用到
- 本帖最后由paulhyde于2014-9-1509:13编辑我也是听说NEC大赛会用到这个而已~找来共享了,这东西貌似不好找。NECD78F1023资料大赛可能会用到本帖最后由paulhyde于2014-9-1509:13编辑自己顶一下,我们老师也把这东西给弄过来了........本帖最后由paulhyde于2014-9-1509:13编辑有没有中文的本帖最后由paulhyde于2014-9-1509:13
-
虚V界
电子竞赛
- 《开关电源设计(第3版)》免费分享
- 分享给大家一本书:《开关电源设计(第3版)》昌晖仪表yunrun.com.cn内容简介《开关电源设计(第3版)》为二十几年来世界公认最权威的电源设计指导著作《开关电源设计》的再版(第三版)。书中系统地论述了开关电源最常用拓扑的基本原理、磁性元件的设计原则及闭环反馈稳定性和驱动保护等。《开关电源设计(第3版)》在讲述的过程中应用教学式、How&why方法,讨论时结合了大量设计实例、设计方程和图表。《开关电源设计(第3版)》同时涵盖了开关电源技术、材料和器件的最新发展等内容。
-
yunrun-com-cn
电源技术






 京公网安备 11010802033920号
京公网安备 11010802033920号