据麦姆斯咨询报道,下一代高分辨率智能雷达传感器对于实现L4级和L5级的自动驾驶至关重要。当然,摄像头和激光雷达(LiDAR)在汽车传感器系统中占有重要的地位。在远距离探测、恶劣天气或其它传感器失灵的情况下,雷达是特别有用的!下面就随汽车电子小编一起来了解一下相关内容吧。
为什么说现在是智能雷达时代?
智能雷达的创新正在开始。当前自动驾驶领域要求打造一款全新的成像雷达系统,它既能够像激光雷达一样重建周围环境,又可以像人一样解读周围的世界,并且在全天候运行和探测距离方面完胜激光雷达和摄像头。采用能够形成波束并控制波束的工程超材料结构,可以打造一种全新的雷达架构,并在人工智能(AI)引擎驱动下,实现对物体的发现、识别、跟踪和分类。
上述新一代雷达已经接近交付使用。这种超越数字发射波,使用超材料和人工智能的智能雷达,是实现自动驾驶的关键要素。这种新型雷达平台的创新方案,尚存在的一些障碍,市场还有不少需要培育的地方,以及在下一代自动驾驶中使用智能雷达的前景,就这些问题,我们与麦得威国际(Metawave)的联合创始人兼首席技术官Bernard Casse博士进行了讨论。以下为相关的讨论内容:
问:为什么说现在是雷达时代?
Bernard Casse(以下简称BC):利益相关者意识到自动驾驶发展时间轴取决于决策算法的成熟度和传感器的性能。迄今为止,在改善激光雷达和摄像头方面,特别是在自动驾驶方面,已经作出了巨大的努力,但我们在探测范围和运行速度方面都遇到了性能门槛。然而,其它传感器如雷达,则相对投入较少。因为与摄像头或激光雷达相比,雷达一直处于劣势,它缺乏解析世界的分辨率。但是,汽车制造商现在认识到,雷达是唯一能够在长距离(200米以上)和全天候条件下工作的传感器,它只是缺乏一定的“视觉和智力”。
利用先进的技术,我们可以令雷达“恢复”视觉并嵌入智能。这就是智能雷达时代。大约有十几家初创企业重新审视了汽车雷达的各个方面。我们预计会有更多的初创企业和公司来解决这个问题。

为什么说现在是智能雷达时代?
问:作为一家顶级汽车公司的首席执行官,关于雷达您觉得用户需要了解什么?
BC:Elon Musk把大量的重心放在雷达上是正确的。它仍然是汽车中最稳定可靠的传感器。许多人,包括一些汽车制造商,对传统的老式雷达很熟悉。当他们想到雷达时,会认为它是一种“视力”低下的传感器,只能模糊“看到”整块的金属(打个比方,这里有一大块金属,那里有一小块金属)。对传统雷达而言,情况的确是这样,但下一代智能雷达就完全不同了。
点云成像(类似于激光雷达)可以通过光束扫描光栅和按照一定算法,实现对物体的图像描绘,比如辨别路标、车辆类型、人、灯柱和更多物体。随着视觉增强和速度的提高,我们可以在雷达中嵌入智能。也就是说,让现在的雷达拥有一个增强的“数字眼”,它可以学习识别物体的特定特征,并将它们与相应的类别相关联。
问:请您多谈谈人工智能的重要性?
BC:人工智能(AI)很关键,因为它是我们人类分散式智能背后的驱动力。我们是分散式智能的支持者。我们认为,雷达传感器和任何其它传感器都应该有自己的大脑。车辆中的决策算法应该依赖于传感器融合(中央智能)和单个传感器(分散式智能)。
这给汽车增加了另一层安全性。如果你的汽车使用摄像头和/或激光雷达“看”到一座桥,现在你的雷达也可以说:“当然,我也能看到一座桥。”分散式智能的概念对雷达来说更为重要,因为它是目前唯一能看到前方300米的传感器,以便成为最早提供预警的系统。当自动驾驶车辆有来自不同传感器的多组数据,使汽车能够接收信息并感知周围环境,自动驾驶会更加安全。
问:当前雷达的发展状况是怎样的?特别是在自动驾驶方面。
BC:当今最先进的雷达是100%数字波束形成(DBF)。尽管在性能方面模拟雷达仍然表现卓越,但因为它的高成本、高功耗架构和复杂性,汽车工业抛弃了模拟雷达(如相控阵天线)。汽车工业对成本一直非常敏感,而且信号处理的成本最终会不断下降,就像其它微芯片上的计算(摩尔定律)一样,DBF仍然是一个诱人的选择。
但DBF的分辨率和速度仍然有限。军方更注重性能,对弹道导弹的探测和跟踪仍然使用模拟雷达。对自动驾驶而言,成本不是也不应该是头等大事,性能和安全性才是最重要的!
问:数字雷达的局限性是什么?
BC:DBF有三个主要缺点,它们有点相互关联:
1、它很慢。DBF用于扫描场景的时间需要毫秒级的等待。在数字域中的信号处理是非常重要的。要达到可接受的信噪比(SINR),需要有毫秒级的积分时间。处理一系列复杂的模拟数字电路和为运行DBF而进行的数字权重的分配,都会造成更高的运算工作量,导致运行迟缓。
2、DBF缺乏分辨率——它看不到狭窄的物体或行人。它不是一个“真正”的波束形成架构,而且完全的波束成形是不切实际的。因为它需要大量的天线来实现高分辨率。首先,实现许多天线是非常昂贵的,需要在雷达芯片组上安装多个端口(非传统)。此外,这将需要更多的快拍数量以获得一个可接受的SINR(因为全方位的噪音将让系统超负荷)。凭借传统的三个发送端口和四个接收端口,分辨率不够清晰,无法看到行人。它适用于汽车(可在分辨率、SINR和范围之间良好权衡),但不适合非金属物体。
3、产生重影。DBF对高相关信号敏感,即DBF会增强来自多条路径信号产生的噪声,产生重影。
问:雷达现在有哪些创新,特别是在汽车领域?
BC:首先,这是一种通常的渐进式工程:第一和第二级供应商侧重于挖掘MMIC(单片微波集成电路)技术的极限。真正的突破性创新都来自初创企业:我们已经看到了新奇的技术如伦伯透镜天线(Luneburg lens antennas),抑制DBF干扰的新算法,3D印刷阵列等。随着我们进入智能雷达时代,我们预计更多的雷达公司将在2018年涌现,并创造更多的创新。不过,我们预计有些会昙花一现,而有些技术会幸存下来。
问:应用一种新型雷达所面临的障碍有哪些?
BC:从76GHz到81GHz的频率窗口是第一大障碍,因为它都属于毫米波范畴。元件和材料都不容易获得,现成的元件还没有经过表征。还有很多有争议的地方需要解决。不过,我们擅长解决这一挑战以及其他挑战,我们已经在很短的时间内取得了重大进展。
在高频率运行的障碍对我们而言不是一个搅局者,而且,事实上,它实际上是一个福音;它让竞争对手的追赶并非易事,使我们保持领先优势。还有一些障碍,由于不能透露太多关于这个平台的信息,我们还不能在这个早期阶段谈论,但所有这些障碍都是可以解决的。到目前为止,还没有什么是不可克服的。我们刚刚开始这项令人兴奋的研发旅程,虽然在今年年初才开始启航,但我们正在展示的和很快准备出货的雷达产品,都非常令人兴奋地预见:在短短几年之后将在道路上实现L4级和L5级的自动驾驶。
问:您认为什么时候我们能看到这些智能雷达安装于自动驾驶汽车?
BC:所有顶级汽车制造商都预测,我们将最早在2025年实现最高级L5级的自动驾驶。在这个群雄争鸣令人兴奋的产业,我们是一家节凑很快的创业公司。明年我们将推出一款雷达产品,我们正在与所有顶级汽车制造商和自动驾驶领域内的战略合作伙伴进行洽谈。我坚信,为了L5级自动驾驶汽车达到要求的安全水平,都必须装配下一代的智能雷达,包括硬件和软件。
问:麦得威国际(Metawave)建立这种新的雷达平台的方法是什么?
BC:麦得威国际独特的方法在于使用了自适应超材料和人工智能(AI)。总体目标是打造具有视觉、速度和智能的高级雷达。在我们的方案中,我们使用全电子可调超材料平台来取代昂贵和高功耗的移相器。

麦得威国际(Metawave)超材料天线技术
从硬件的角度来看,这个方案是在保证与当前军用模拟移相器同等性能的前提下,去除了那些成本高、复杂性强和重量大的元件。从软件的角度来看,我们正在开发强大的硬件控制、信号处理和决策算法,尤其针对硬件进行了优化。
麦得威国际的新一代雷达产品名称为WARLORD(缩写自 W-Band Advanced Radar for Long-Range Object Recognition and Detection),其频段在76~81GHz。WARLORD 采用了超材料天线,能发射可操控的高度定向的电磁波束,精准探测目标物的位置、速度,且不惧怕恶劣天气以及环境。

WARLORD雷达能发射可操控的高度定向的电磁波束
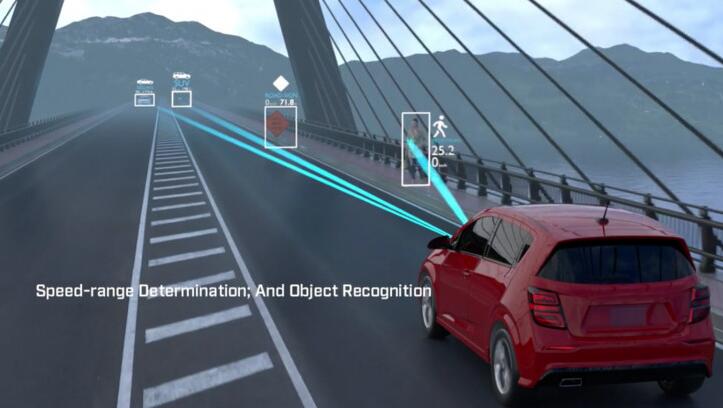
并且这款毫米波雷达内置了麦得威国际自研的人工智能引擎:像人类一样思考的WARLORD雷达AI(WARLORD Radar AI Thinking like Humans,WRATH),其中嵌入了各类物体识别和分类算法,可以分辨出道路参与者的属性(行人、自行车、摩托或者巴士等),能够提供如人眼一般的感知能力,被称为“Digital Eye”。这是因为这样的特性,WARLORD 还能采集 3D 雷达图像。

WARLORD雷达工作原理
以上是关于汽车电子中-为什么说现在是智能雷达时代?的相关介绍,如果想要了解更多相关信息,请多多关注eeworld,eeworld电子工程将给大家提供更全、更详细、更新的资讯信息。
上一篇:英伟达暂停无人车 芯片巨头声称:吸取Uber教训
下一篇:无人驾驶汽车时代 高品布局汽车传感器、汽车雷达测试设备
 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南 OP08AJ/883
OP08AJ/883

Vishay线上图书馆

- LT3844EFE 演示板,具有 PLL 的 60V DC/DC 控制器
- LF50ACP 5V 顺序极低压降稳压器多输出电源的典型应用
- LT3853EUJ 演示板,6.5V < VIN< 24V,输出电压:1.8V/5A、2.5V/5A、3.3V/5A
- 使用 Endicott Research Group 的 SFD2EB4190F 的参考设计
- LTM8052EY 31Vin、-5Vout 负转换器的典型应用
- LTC3621EMS8E-5 1.2Vout、强制连续模式、1MHz 同步降压稳压器的典型应用
- 【训练营】长了机械臂的瓦无力
- TP4056充电模块
- LT4275CIMS LTPoE++ 38.7W 至 90W 受电设备的典型应用电路
- 较好的VC++集运动控制卡,CAD导图,手工绘图,的源代码和软件






- EEWorld下载中心大批技术资料等你来领,还有好礼相助
- 【晒月亮抢楼有礼】中秋月圆,千里共赏!
- 抢先体验NUCLEO家族新贵,ST STM32 NUCLEO-F091RC开发板28元包邮!
- 有奖直播 | 瑞萨新一代视觉 AI MPU 处理器 RZ/V2H:高算力、低功耗、实时控制
- 有奖直播:英飞凌针对电动工具的高功率、高效率以及高可靠性解决方案
- “玄铁杯”第三届RISC-V应用创新大赛—国产高性能RISC-V Linux开发板LicheePi 4A报名专场,万元奖金,邀您奔赴开源设计盛宴
- 第二季学习体验活动风暴来袭!
- 有奖活动|登陆泰克高精度电源测试知识星球,揭开噪声的迷雾,发现真实的信号!
- 直播已结束|Littelfuse 智能楼宇电子设备安全与可靠性解决方案
- TI MCU 常见问题(FAQ)大搜集






 京公网安备 11010802033920号
京公网安备 11010802033920号