在非标自动化设计中,往往离不开伺服电机。电机的种类众多,然而成了许多设计工程师的难题,一直被困扰着。接下来教你怎么选择伺服电机,告诉你伺服电机到底怎么选型。

伺服(Servo),指系统跟随外部指令进行人们所期望的运动,运动要素包括位置、速度、加速度和力矩。 伺服控制系统(servo control system)一-是所有机电一-体化设备的核心,它的基本设计要求是输出量能迅速而准确地响应输入指令的变化,如机械手控制系统的目标是使机械手能够按照指定的轨迹进行运动。象这种输出量以一-定准确度随时跟踪输入量(指定目标)变化的控制系统称为伺服控制系统,因此,伺服系统也称为随动系统或自动跟踪系统。它是以机械量如位移、速度、加速度、力、力矩等作为被控量的一种自动控制系统。
一:力矩
1.定义:使物体转动状态产生变化的因素,即物体在受到不为零的外力矩作用下,原为静止的将开始转动,原为转动的转速将发生变化。
2. 扭矩:转动力矩又称为转矩或扭矩。
3. 公式:力矩等于径向矢量与作用力的 如右图所示:欲让门产生转动,必须施加一外力F。施力点离转轴越远越容易使门产生转动。平行于门面的分力对门的转动没有效果,只有垂直于门面的分力才能让门产生转动。力矩的符号经常用T表示。单位N●mT=rFsin 0=有效作用力x力臂.
4.电机转速和扭矩(转矩)公式 扭矩公式: T=9550P/nT是扭矩,单位N.m;P是输出功率,单位KW;n是电机转速,单位r/min扭矩公式: T=973P/nT是扭矩,单位kg:m;P是输出功率,单位KW;n是电机转速,单位r/min 5.扭矩计算
扭矩计算
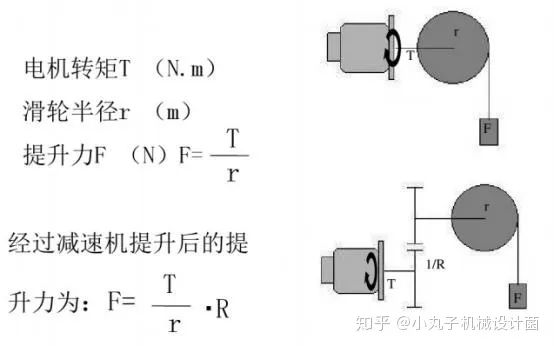
6.电机带动丝杆扭矩计算
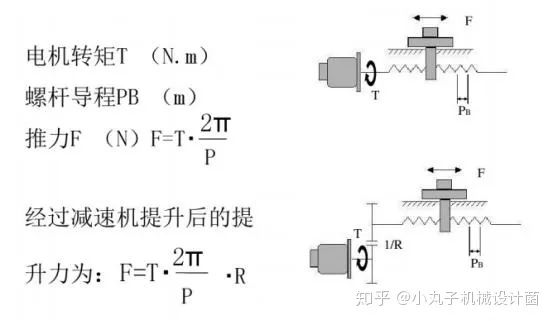
电机带动丝杆扭矩计算
二.转动惯量
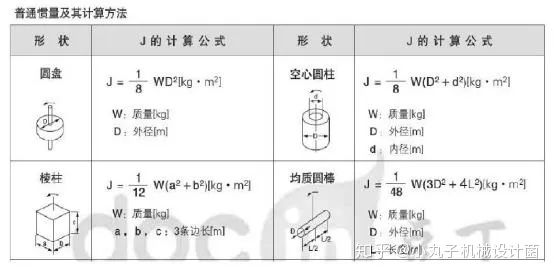
1.定义:是刚体绕轴转动时惯性的量度。通常以字母I或J来表示。单位为kg.m2 2.与转动惯量有关的因素: 1.刚体的总质量 2.质量分布 3.转轴的位置

转动惯量的计算
三.伺服电机的选型原则
●连续工作扭矩<伺服电机额定扭矩
●瞬时最大扭矩<伺服电机最大扭矩(加速时)
●惯量比<电机规定的惯量比
●连续工作速度<电机额定转速

四.伺服电机选型步骤
1.确定机构部 次外,还要确定各机构零件(滚珠丝杆的长度,导程和带轮直径等)的细节.

机构部典型实例
2.确定运转模式 加减速时间、匀速时间、停止时间、循环时间、移动距离等。

注:运转模式对电机的容量选择有很大的影响。除了特别需要的情况,加减速时间、停止时间尽量取得大点,就可以选择小容量的电机
3.计算负载惯量和惯量比 结合各机构部计算负载惯量。( 请参照普通的惯量及其计算方法)并且用所选的电机的惯量去除负载惯量,计算惯量比。
4.计算转速 根据移动距离、加减速时间、匀速时间计算电机转速。
5.计算转矩 根据负载惯量和加减速时间、匀速时间计算所需的电机转矩。
6.选择电机 选择能满足以上3~5项条件的电机。

 零基础学电子与Arduino:给编程新手的开发板入门指南
零基础学电子与Arduino:给编程新手的开发板入门指南 ADC0854BCN/B+
ADC0854BCN/B+






- LT6657AHMS8-3 低噪声统计平均基准的典型应用电路
- EVALSTPM33,单相防篡改电能计量演示板,带 CT 和基于 STPM33 的分流器
- AD9125-M5375-EBZ,用于 AD9125 双通道、16 位、1 GSPS、TxDAC+ 数模转换器的评估板
- LT1117IST-3.3 高效低压差稳压器的典型应用
- 基于STM32F103C8T6的单片机学习板+835834A
- AL1663EV,基于 AL1663 30V/650mA 高亮度反激式 LED 驱动器控制器的评估板
- LT6656BCDC-3.3、3.3V 低功率精密高压电源监视器的典型应用
- STM32F103C6TY
- LTC2668HUJ-16、16 通道、16 位 ±10V VOUT SoftSpan DAC 的典型应用电路
- 语音控制舵机开关灯












 京公网安备 11010802033920号
京公网安备 11010802033920号