用基本操作面板进行手动速度给定方法简单,对资源消耗少,但这种速度给定方法对于操作者来说比较麻烦,而且不容易实现自动控制,而PLC控制的多段速度给定和通信速度给定,就容易实现自动控制,以下将介绍PLC控制的多段速度给定。
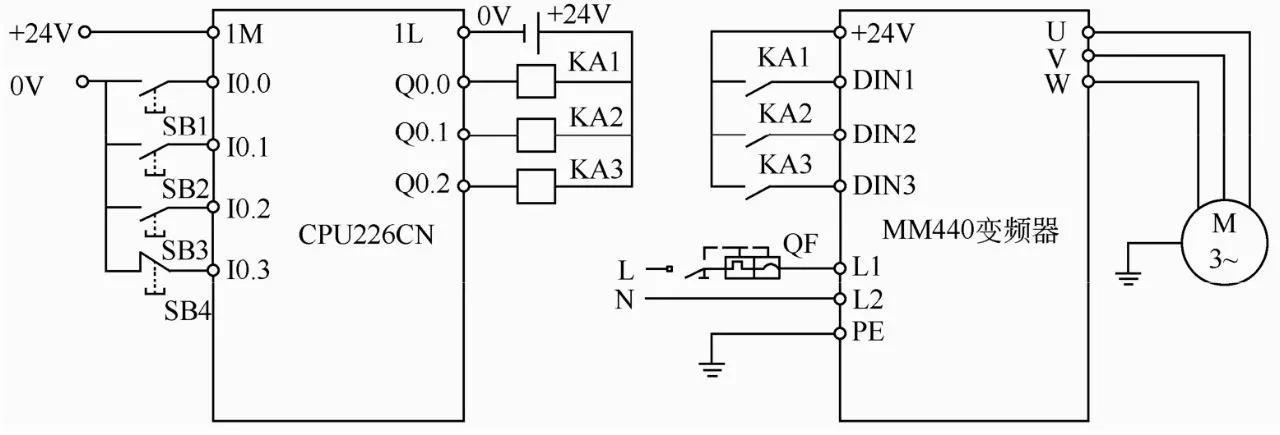
【例1-1】 用一台继电器输出CPU226CN(DC/AC/Relay),控制一台MM440变频器,当按下SB1时,三相异步电动机以5Hz正转,当按下SB2时,三相异步电动机以15Hz正转,当按下SB3时,三相异步电动机以15Hz反转,已知电动机的技术参数,功率为0.06kW,额定转速为1430r/min,额定电压为380V,额定电流为0.35A,额定频率为50Hz,请设计方案,并编写程序。
解:①主要软硬件配置
a.1套STEP7-Micro/WIN V4.0。
b.1台MM440变频器。
c.1台CPU 226CN。
d.1台电动机。
e.1根编程电缆(或者CP5611卡)。硬件1-1所示

多段速度给定接线图(PLC为继电器输出)

多段速度给定变频器参数(PLC为继电器输出)当Q0.0为1时,变频器的9号端子与DIN1端子连通,电动机以5Hz(固定频率1)的转速运行,固定频率1设定在参数P1001中;当Q0.0和Q0.1同时为1时,DIN1和DIN2端子同时与变频器的24V(端子9)连接,电动机以15Hz(固定频率1+固定频率2)的转速运行,固定频率2设定在参数P1002中。修改参数P0701,对应设定数字输入1(DIN1)的功能;修改参数P0702,对应设定数字输入2(DIN2)的功能,依次类推。
【关键点】 不管是什么类型PLC,只要是继电器输出,其接线图都可以参考图1-2,若增加三个中间继电器则更加可靠,如图1-3所示。
多段速度给定接线图(PLC为继电器输出,增加三个中间继电器
多段速度给定接线图(PLC为NPN晶体管输出)
多段速度给定程序(PLC为NPN晶体管输出)

上一篇:电动机保护用断路器的选择原则
下一篇:PID控制器的传递函数
推荐阅读最新更新时间:2024-11-12 10:56

推荐帖子
- 线性充电器的基本功能
- 随着创新应用、新兴技术和新电池化学成分的出现,充电器的需求不断发展。例如,可穿戴设备领域的新应用(如智能银行卡、智能服装和医疗贴片)引领着解决方案变得更小巧便宜,同时也推动着电池朝更小更高功率密度的方向发展。典型问题或疑虑包括:如何最大限度地延长电池的使用时间?如何延长产品的保质期?是否有可能对电池进行过度放电?如果电池缺失或损坏会发生什么?如何让产品与较弱的适配器一起工作?,以及可以将相同的充电器用于不同的设计和不同的电池吗?在本文中,将讨论线性充电器的不同
-
qwqwqw2088
 模拟与混合信号
模拟与混合信号
- [B-G431B-ESC1评测] 六、电机控制原理 与 初步实现BLDC
- 一、电机控制算法目前比较主流的控制算法有三种,FOC,BLDC(BLDC其实是特指一类电机,但是都会把它默认为六部方波控制法),DTC(用于交流电机),其中FOC与BLDC非常常见,DTC很少见,目前就知道ABB有在用这种控制算法。1、矢量控制(VectorControl)矢量控制算法,也称为场定向控制(FOC),是一种广泛应用于交流电机(尤其是感应电机和永磁同步电机)的控制策略。它的主要目标是实现对电机的精确控制,使其具有与直流电机相似的控制特性。
-
dvacos
电机驱动控制(Motor Control)
- nRF24L01无线模块
- nRF24.L01是一款新型单片射频收发器件,工作于2.4GHz~2.5GHzISM频段。内置频率合成器、功率放大器、晶体振荡器、调制器等功能模块,并融合了增强型ShockBurst技术,其中输出功率和通信频道可通过程序进行配置。nRF24L01功耗低,在以-6dBm的功率发射时,工作电流也只有9mA;接收时,工作电流只有12.3mA,多种低功率工作模式,工作在100mw时电流为160mA,在数据传输方面实现相对WiFi距离更远,但传输数据量不如WiFi(掉电模式和空闲模
-
zhao123966
RF/无线
- 具有数字控制功能的电源
- 关于数字电源,有多种定义。比较常见的有 定义一:具有数字控制功能的电源(强调控制功能) 定义二:通过数字接口控制的电源(强调通讯功能) 定义三:具有数字监测功能的电源(强调监测功能) 本帖只准备讨论第一种定义所述的数字电源,即具有数字控制功能的电源。这类电源也往往被称为程控电源,意思是由程序控制的电源。有时也称数控电源,意思当然就是数字控制的电源。 其实,D/A芯片就是一个程控电源,其输出电压是由输入的数字信号决定的。但是,D/A芯片允许输出的电流实
-
maychang
模拟与混合信号
- 请教一下关于基于555定时器的50%占空比无稳态电路的问题
- 各位大佬好,小弟在其他地方看到下面这个基于555定时器的50%占空比无稳态电路的电路图:这位博主说这个电路图中C1的充放电都是通过R2完成,所以充放电时间都是0.693*R2*C1,从而发出50%占空比的方波。然后还说了R1需要选取足够大的电阻,以免影响方波的占空比。那么这个R1在电路中起到什么作用呢,博主原文说是保证C1能够充到VCC,但是C1电压在充放电过程中不是在1/3-2/3VCC之间循环吗?另外,R1足够大,对C1的充电作用就可以忽略不计吗?希望能够得到各位大佬
-
努力学习的蓝君
模拟电子
- 摩托罗拉半导体工程师写的汽车电子的EMC设计
- 作者:RichardSoja高级工程师摩托罗拉半导体事业部传输和标准产品组汽车电子处于一个充满噪声的环境,因此汽车电子必须具有优秀的电磁兼容(EMC)性能。而汽车电子的EMC设计中最主要的是微处理器的设计,作者将结合实际设计经验,分析噪声的产生机理并提出消除噪声的方法。汽车电子常常工作环境很恶劣:环境温度范围为-40oC到125oC;振动和冲击经常发生;有很多噪声源,如刮水器电动机、燃油泵、火花点火线圈、空调起动器、交流发电机线缆连接的间歇切断,以及某些无线电
-
小猪
汽车电子
 电工电子技术 (刘耀元,胡民山主编;邹小莲,周红雨,李河水副主编)
电工电子技术 (刘耀元,胡民山主编;邹小莲,周红雨,李河水副主编) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用
- rtl8723bs底板_兼容Alpha I.MX
- GD32E230c8t6最小系统板
- LTC3110IFE 500mA USB 充电/备用应用的典型应用电路,具有可变充电功率 PCHRG,取决于系统负载
- MAXREFDES128#: No-Opto Isolated, PoE, 48V to 5V, 12.5W Flyback Power Supply
- TC78S600FTG 2 相双极步进电机驱动器评估板
- LT6658AIMSE-2.5 低漂移稳压器应用的典型应用电路
- 用于便携式的 1W、1 通道、AB 类音频功率放大器
- 用于便携式消费电子产品的 0.085V、0.8 至 2V DC 至 DC 多输出电源
- 小汐 -> 8051 Uno
- XRP6658 1A 1.5MHz PFM/PWM同步降压转换器典型应用电路












 京公网安备 11010802033920号
京公网安备 11010802033920号