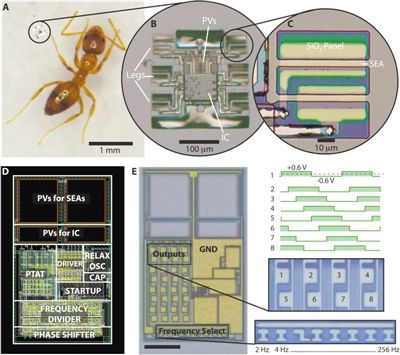
(A)蚂蚁旁边的微型机器人。(B)机器人的放大视图。(C)机器人的一条腿 ,由刚性面板、活动铰链组成。(D)带有标记的主要电路块的电路的CAD布局图像。(E)微型机器人控制电路的光学显微镜图像。 图片来源:《科学·机器人》
据发表在21日的《科学·机器人》杂志的论文,美国康奈尔大学的研究人员在100到250微米大小的太阳能机器人上安装了比蚂蚁头还小的电子“大脑”,这样它们就可以在不受外部控制的情况下自主行走。
这项创新为新一代微型设备奠定了基础,这些设备可以跟踪细菌、嗅出化学物质、摧毁污染物、进行显微手术并清除动脉中的斑块。
这种新型机器人的“大脑”是一个互补金属氧化物半导体(CMOS)时钟电路,它包含1000个晶体管,外加二极管、电阻器和电容器阵列。集成CMOS电路产生一个信号,该信号产生一系列相移的方波频率,进而设定机器人的步态。机器人腿是铂基制动器,电路和支腿都由光伏供电。
新型机器人的大小仅为搭载在机载CMOS电子设备上的大型机器人的万分之一,并且可以每秒10微米以上的速度行走。
研究人员之前已经开发出了可以爬行、游泳、行走和折叠自己的微型机器人,但总是有连接在一起的“线”。为了产生运动,这根电线被用来提供电流,或者必须让激光光束直接聚焦到机器人身上的特定位置。
“以前,我们必须操纵这些‘线’,才能从机器人那里得到任何形式的反应。”康奈尔大学物理学教授伊泰·科恩说,“现在我们有了这些大脑,仿佛从提线木偶上解开了绳子,就像匹诺曹有了意识一样。”
上一篇:自主无线机器人Antbot可以在人的头发上“跳舞”
下一篇:用什么吸引零零后重返制造业?MiR为本土职业技术高校提升科技内核
推荐阅读最新更新时间:2024-10-09 19:07
 电子电路入门 (福田)
电子电路入门 (福田) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用





- AM1G-4812SH30Z 12V 1W DC/DC 转换器的典型应用
- 基于STM32的脉搏电子血压计(原理图+程序)
- TWR-MCF51JE-KIT,用于 ColdFire Flexis MCF51JE 低功耗 USB 塔式系统模块的塔式开发板,适用于便携式应用
- 具有环境光收集器或 USB 供电充电功能的 LTC3106IFE 便携式医疗设备的典型应用电路
- OP413ESZ耳机输出放大器多媒体声音编解码器典型应用
- 200W大功率甲乙类功放
- FRDM33926PNBEVM: Freedom Kit - MC33926, 5.0 A Throttle H-B
- LT1120IN8 5V 微功率稳压器典型应用电路
- DER-282 - 使用HiperLCSTM LCS700HG设计的100 W超薄 (11 mm) LLC DC-DC转换器
- ST8500 PLC&RF混合连接开发套件












 京公网安备 11010802033920号
京公网安备 11010802033920号