摘要:阐述了基于UC3638的PWM双极性电流控制器构成的半导体热电致冷器(TEC)温控系统。对UC3638增强型PWM电机控制IC的特点进行了介绍。给出了由UC3638构成的TEC双极性电流驱动器的设计方法。给出的温控实验结果证明了基于UC3638的控制器是可行的。
关键词:UC3638;半导体热电致冷器;脉宽调制;双极性电流控制
0 引言
半导体热电致冷器(Thermo-E1ectric Cooler,简称TEC)具有体积小、无噪音、无污染等特点。广泛应用于航天、军事、光电、机电、医疗、汽车、通讯等领域。在某类仪器研制过程中,需要对金属块迅速加热制冷和恒温,进行热循环工艺控制,TEC能很好满足这种要求。TEC依靠热交换,从一面吸热另一面放热实现加热制冷。因TEC电功率几乎全部转化为热能QF=UI,仅在TEC吸热面热交换量QJ大于发热量QF/2(假定电功率产生的热量在两面平均分配)时,且当放热面有效散热时,TEC吸热面才能制冷(吸热面吸热量QIN=QJ一QF/2,放热面散热量QOUT=QJ+QF/2)。TEC吸热面或放热面由TEC电流(TEC可看作是一个非线性电阻负载,电流方向随电压方向改变)方向决定。吸热量同时受温差和电流大小的影响;且在同一电压为获得不同温差和吸热量,电流变化很大。因此用TEC加热制冷,控制电流比电压好;由于要调节电流大小和方向,故把它称为双极性电流控制。为实现热循环工艺控制特性,有必要设计TEC驱动控制器。
1 TEC温控驱动方案确定
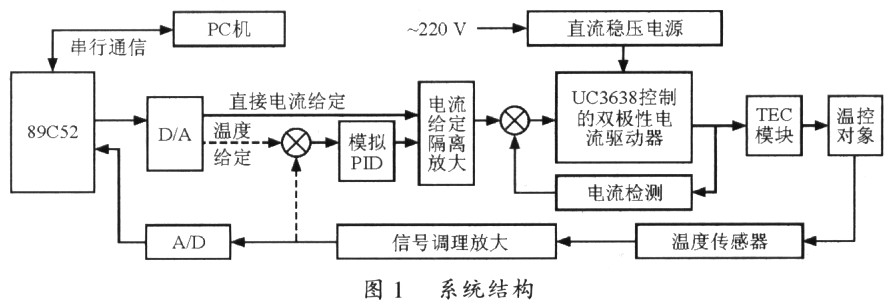
温控对象形状多样,受热应力影响TEC不能做得过大,所以在很多情况下须用多块TEC。TEC电气连接方式有串联、并联和串并联。并联使用由于布线较为困难,且驱动时导通损耗大,所以根据器件容量及温控对象等因素,我们选用串联和串并联的连接方式。现有TEC模拟控制lC及电路虽在某个温度点控温精度很高,但主要针对小功率应用,工作电压较低,不适合大功率下快速变温,芯片价格较昂贵。而用微控制器全数字控制方式产生PWM,因PWM频率低不利于系统小型化。UC3638是TI公司的增强型电机控制IC,可构成高性能直流电机PWM驱动电路。它具有差分电流放大器,与误差放大器配合可构成平均电流反馈,所以,还可用于单极性或双极性可调电流的场合。采用直流稳压电源,经UC3638驱动全桥可获得双极性电流,构成TEC驱动简单易行(当然也可设计OV起调直流稳流电源,再经固态继电器构成全桥改变电流方向,但设计更复杂,不利于在研制初期快速构建系统,以对整个仪器做出评估)。适当增加运放,UC3638即可构成具有直接电流给定和温度给定(再经模拟PID生成电流给定信号)两种控制方式,且不需微控制器干预。TEC温控系统结构如图1所示。由PC机送出温度点并控制时间,再由89C52完成温度的实时监控和温度上传及数字控制(可选温度给定或直接电流给定),经D/A转换,再通过模拟PID或直接送到模拟隔离放大器;最后由UC3638构成的双极性电流控制器起内环电流调节的作用,驱动TEC,对温控对象进行加热制冷。对象的温度由温度传感器检测,经信号调理放大,一方面送至模拟PID温度调节,另外经A/D转换成数字量,供89C52完成数字温度控制。
 2 UC3638芯片介绍
UC3638增强型直流电机PWM控制器,适用于各类直流电机PWM驱动控制,还可用来设计需要单向或双向电流驱动的功率放大器,其内部结构如图2所示。它包含有模拟信号误差放大器和PWM调制器;根据误差放大输入信号的极性和大小,PWM调制器输出两路不同极性和宽度的脉冲串。因此,它可用于双向调速系统和其他需要单极性或双极性可调电压或电流的场合。由于改进了电路设计和提高了集成度,UC3638减少了许多外围电路元件。它还有以下特点:电路速度有了显著提高,内部有可编程高频三角波发生器,高转换速率误差放大器,高速PWM比较器,PWM开关频率可达500kHz。增加的5倍固定增益差分电流放大器和误差放大器配合,可构成平均电流反馈控制电路以提高系统响应速度(电流型控制)。两路60V/50mA集电极开路输出以驱动全桥上管,两路500mA图腾柱输出可驱动全桥下管。可编程引脚AREFIN允许单电源或双电源工作。振荡器斜波幅度和PWM死区经5V分压,由设置引脚PVSET(振荡器斜波幅度设置)和DB(PWM死区设置)设定。另外还包括精确的5V参考电压输出,欠压锁定,双向逐周峰值电流保护,遥控关断引脚(可兼做软启动)。
2 UC3638芯片介绍
UC3638增强型直流电机PWM控制器,适用于各类直流电机PWM驱动控制,还可用来设计需要单向或双向电流驱动的功率放大器,其内部结构如图2所示。它包含有模拟信号误差放大器和PWM调制器;根据误差放大输入信号的极性和大小,PWM调制器输出两路不同极性和宽度的脉冲串。因此,它可用于双向调速系统和其他需要单极性或双极性可调电压或电流的场合。由于改进了电路设计和提高了集成度,UC3638减少了许多外围电路元件。它还有以下特点:电路速度有了显著提高,内部有可编程高频三角波发生器,高转换速率误差放大器,高速PWM比较器,PWM开关频率可达500kHz。增加的5倍固定增益差分电流放大器和误差放大器配合,可构成平均电流反馈控制电路以提高系统响应速度(电流型控制)。两路60V/50mA集电极开路输出以驱动全桥上管,两路500mA图腾柱输出可驱动全桥下管。可编程引脚AREFIN允许单电源或双电源工作。振荡器斜波幅度和PWM死区经5V分压,由设置引脚PVSET(振荡器斜波幅度设置)和DB(PWM死区设置)设定。另外还包括精确的5V参考电压输出,欠压锁定,双向逐周峰值电流保护,遥控关断引脚(可兼做软启动)。
 3 双极性电流控制器的原理和设计
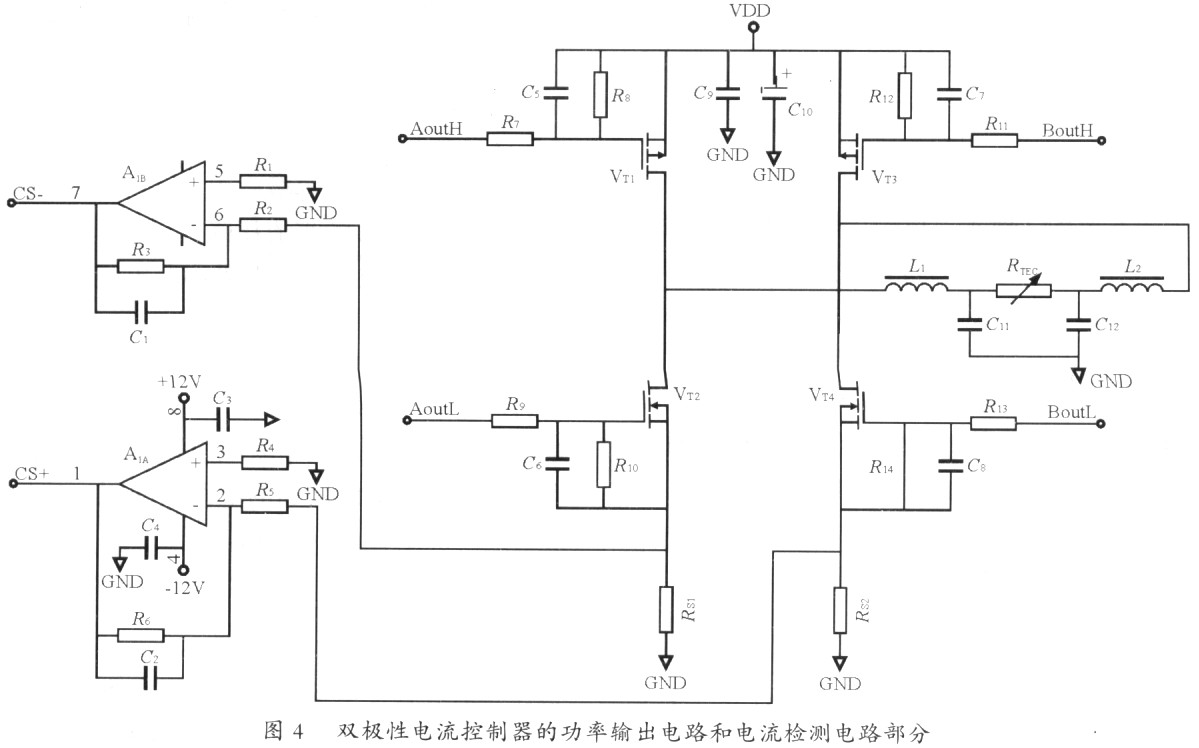
如图3所示,由隔离放大器的电流控制信号Vc经R1.,同来自外加的差动电流放大器A1B的电流反馈信号经R3相加,经UC3638内部的误差放大器进行电流PT凋节(R2,C1,C2构成补偿网络),再经内部PWM比较器等形成PWM控制信号Aoutl.Aout2,B0utl,Bout2,经VQ1~VQ8形成驱动信号AoutL,AoutH,BoutL,BoutH,驱动图4中VT1~VT2成的全桥,输出PWM功率信号,再经L1,L2,C11.C12滤波得到双极性电流(电压)对TEC(图4中RTEC)供电。桥路电流信号由电阻RS1,RS2(实际为多个低阻值电阻并联)检测,经A1A,A1B构成的反相放大器放大再送至图3中的A1B构成平均电流反馈。
3 双极性电流控制器的原理和设计
如图3所示,由隔离放大器的电流控制信号Vc经R1.,同来自外加的差动电流放大器A1B的电流反馈信号经R3相加,经UC3638内部的误差放大器进行电流PT凋节(R2,C1,C2构成补偿网络),再经内部PWM比较器等形成PWM控制信号Aoutl.Aout2,B0utl,Bout2,经VQ1~VQ8形成驱动信号AoutL,AoutH,BoutL,BoutH,驱动图4中VT1~VT2成的全桥,输出PWM功率信号,再经L1,L2,C11.C12滤波得到双极性电流(电压)对TEC(图4中RTEC)供电。桥路电流信号由电阻RS1,RS2(实际为多个低阻值电阻并联)检测,经A1A,A1B构成的反相放大器放大再送至图3中的A1B构成平均电流反馈。

 3.l UC3638外围电路设计
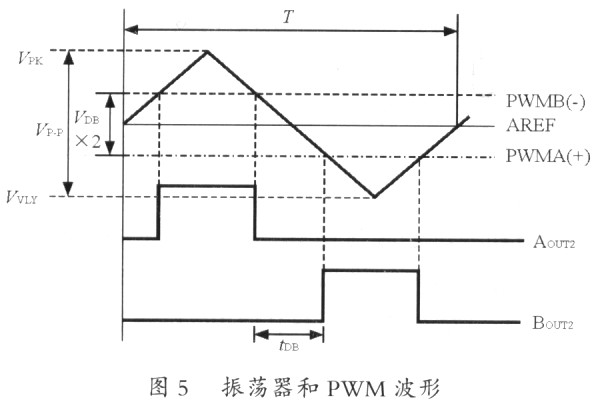
1)如图3及图5所示,假设UC3638供电电源为%26;#177;12V,三角波发生器振幅为10Vp-p,按UC3638的设计要求,脚PVSET的电平按如下设置:VPK一VVLY=5VIPVSET,VIPVSET=VR6=10/5=2 V,取R6为10 kΩ,IR5=IR6=2/(10%26;#215;lO3)=O.2 mA, R5=(VAREF一VR6)/IR6=(5-2)/(O.2%26;#215;lO-3)=15 kΩ。R5取信以实际调试为准。
2)如果取1V死区电压,5-VDB=1V,VDB=4V,取R12为10 kΩ,IR1=IR12=VDB/R12=4/R12=4/10%26;#215;103=O.4mA.R11=(5-VDV)/IR11=1/(O.4%26;#215;10-3)=2.5 kΩ。R11取值以实际调试为准。并联C6在R12上可获得软启动特性(即上电后死区由大逐渐减小)。
3)取VCC一VSD=8V(小于2.5 V进入软启动状态),R14=10 kΩ,IR14=IR15=8/10%26;#215;l0-3=O 8 mA,R15=(2%26;#215;VCC-VR14)/H15=(24-8)/(O.8%26;#215;10-3)=20 kΩ。为现可获得芯片延迟使能特性:在R14上并联电容C8.
4)取频率发生器外接电容C4为1000 pF,由于f/=l/(5%26;#215;RT%26;#215;CT),取f=35 kHz,R13=RT=1/(5%26;#215;f%26;#215;GT)=1/(5%26;#215;35kHz%26;#215;1000 pF)≈5.8kΩ。取R13为6.2 kΩ。当RT=6.2 kΩl时,脚RT的充电电流限制为2.4 V/6.2 kΩ=O 387 mA。小于规定的最大1mA限制。
5)验算死区时间tDB=VDB/[(VPK-VVLY)%26;#215;=(5-VDB)%26;#215;RT%26;#215;CT/VPVSET=1%26;#215;6.8 kΩ%26;#215;1000 pF/2V=3.4μs。可见死区时间远大于MOSFET的开关时间,实际应用中可根据输出波形调整R11。
3.2 电流检测电路设计
在实际应用中,由于需要对多个TEC模块串并联使用以提高加热制冷功率,所以驱动输出电压电流较大(最大设计值%26;#177;24V/20A,实测%26;#177;25V/17.5A)。为提高效率以减小发热,我们采用多个低阻值电阻并联作为电流检测取样电阻。这样,原有UC3638内部的电流检测差分放大器放大倍数不够,须外加放大器。但实验发现,PWM驱动器工作时,由于电路高速开关切换产牛很大的dv/di和di/dt,由此产生共模尖峰电压,从而引起很大的地线干扰。在采取了减小干扰的各种措施后,因控制器内部的电流限制阈值较低(%26;#177;2.5V),很容易引起驱动电路自锁无输出。于是,我们根据其内部电路通过外加运放(图3中A1B和图4中A1A及A1B)的方式实现高倍率的差分电流放大和电平移位(将CS+和CS一短路接地以屏蔽内部差分放大器),并将最后的差分电流放大输出通过图3中电阻R4接至CSOUT以实现最大电流限制功能。同时在信号通路上加上小电容以滤除高频干扰。另外,在MOSFFT栅源极间加电容以减小电路开关切换和密勒电容对栅极驱动信号的不利影响,该措施和死区形成电路一起使驱动器可靠工作,不会发生上下管直通现象,并有效地提高了控制电路的稳定性。
3.3 驱动和全桥电路
采用NPN和PNP互补开关管对PWM输出控制信号进行放大和电平移位。采用P沟道管IRFl4905作为上管,N沟道管IRF3205作为下管构成全桥电路。值得注意的是,当要求占空比最大值达到l时,不能使用普通的泵电路(常用于驱动N沟道上管)对上管驱动。
3.l UC3638外围电路设计
1)如图3及图5所示,假设UC3638供电电源为%26;#177;12V,三角波发生器振幅为10Vp-p,按UC3638的设计要求,脚PVSET的电平按如下设置:VPK一VVLY=5VIPVSET,VIPVSET=VR6=10/5=2 V,取R6为10 kΩ,IR5=IR6=2/(10%26;#215;lO3)=O.2 mA, R5=(VAREF一VR6)/IR6=(5-2)/(O.2%26;#215;lO-3)=15 kΩ。R5取信以实际调试为准。
2)如果取1V死区电压,5-VDB=1V,VDB=4V,取R12为10 kΩ,IR1=IR12=VDB/R12=4/R12=4/10%26;#215;103=O.4mA.R11=(5-VDV)/IR11=1/(O.4%26;#215;10-3)=2.5 kΩ。R11取值以实际调试为准。并联C6在R12上可获得软启动特性(即上电后死区由大逐渐减小)。
3)取VCC一VSD=8V(小于2.5 V进入软启动状态),R14=10 kΩ,IR14=IR15=8/10%26;#215;l0-3=O 8 mA,R15=(2%26;#215;VCC-VR14)/H15=(24-8)/(O.8%26;#215;10-3)=20 kΩ。为现可获得芯片延迟使能特性:在R14上并联电容C8.
4)取频率发生器外接电容C4为1000 pF,由于f/=l/(5%26;#215;RT%26;#215;CT),取f=35 kHz,R13=RT=1/(5%26;#215;f%26;#215;GT)=1/(5%26;#215;35kHz%26;#215;1000 pF)≈5.8kΩ。取R13为6.2 kΩ。当RT=6.2 kΩl时,脚RT的充电电流限制为2.4 V/6.2 kΩ=O 387 mA。小于规定的最大1mA限制。
5)验算死区时间tDB=VDB/[(VPK-VVLY)%26;#215;=(5-VDB)%26;#215;RT%26;#215;CT/VPVSET=1%26;#215;6.8 kΩ%26;#215;1000 pF/2V=3.4μs。可见死区时间远大于MOSFET的开关时间,实际应用中可根据输出波形调整R11。
3.2 电流检测电路设计
在实际应用中,由于需要对多个TEC模块串并联使用以提高加热制冷功率,所以驱动输出电压电流较大(最大设计值%26;#177;24V/20A,实测%26;#177;25V/17.5A)。为提高效率以减小发热,我们采用多个低阻值电阻并联作为电流检测取样电阻。这样,原有UC3638内部的电流检测差分放大器放大倍数不够,须外加放大器。但实验发现,PWM驱动器工作时,由于电路高速开关切换产牛很大的dv/di和di/dt,由此产生共模尖峰电压,从而引起很大的地线干扰。在采取了减小干扰的各种措施后,因控制器内部的电流限制阈值较低(%26;#177;2.5V),很容易引起驱动电路自锁无输出。于是,我们根据其内部电路通过外加运放(图3中A1B和图4中A1A及A1B)的方式实现高倍率的差分电流放大和电平移位(将CS+和CS一短路接地以屏蔽内部差分放大器),并将最后的差分电流放大输出通过图3中电阻R4接至CSOUT以实现最大电流限制功能。同时在信号通路上加上小电容以滤除高频干扰。另外,在MOSFFT栅源极间加电容以减小电路开关切换和密勒电容对栅极驱动信号的不利影响,该措施和死区形成电路一起使驱动器可靠工作,不会发生上下管直通现象,并有效地提高了控制电路的稳定性。
3.3 驱动和全桥电路
采用NPN和PNP互补开关管对PWM输出控制信号进行放大和电平移位。采用P沟道管IRFl4905作为上管,N沟道管IRF3205作为下管构成全桥电路。值得注意的是,当要求占空比最大值达到l时,不能使用普通的泵电路(常用于驱动N沟道上管)对上管驱动。
 3.4 输出LC滤波电路设计
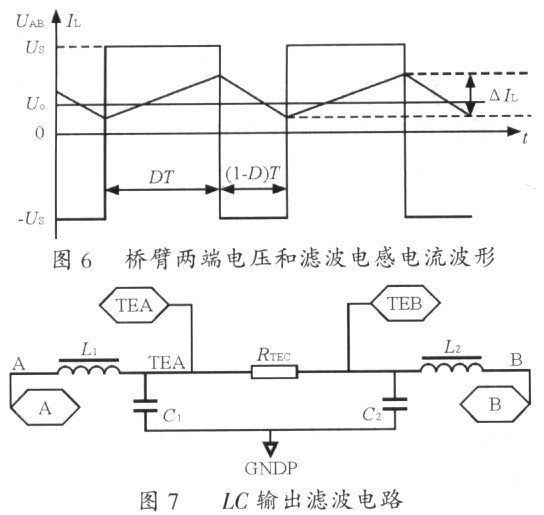
如图6及图7所示,设一个周期内TEC两端电压Uo近似不变,UAB为桥臂中点间电压,US为桥臂供电电压,IL,为电感电流,IOMAX为驱动器最大输出电流,D为占空比,TS为开关周期,fs为开关频率,L=L1=L2为滤波电感,C=C1=C2为滤波电容,RTEC为TEC的等效电阻,则由LC输出滤波电路和桥臂两端电压和滤波电感电流波形可得
△It=(US-Uo)DTS/(2L)
=(Us+Uo)9(l—D)Ts/(2L) (1)
因为Uo=(2D一1)Us,
所以△IL=D(1一D)TsUs/L。
当D=0.5时△IL有最大值△ILMAX=Us/(4fsL)。可选择L使纹波电流△IL,,不大于LOMAX的(10~20)%。由于TEC所能达到的温差随纹波电流的增大会减小,其近似的降额公式为
dθ/dθMAX=1/(1+N2) (2)
式中:dθ是TEC在电流有纹波下所能达到的温差;
dθMAX是TEC在直流电流下所能达到的最大温差;
N是电流纹波系数,通常制造商要求电流纹波系数不得大于10%。
由于TEC纹波电流的推导较复杂,这里仪给出文献里的一个估算公式供参考。
3.4 输出LC滤波电路设计
如图6及图7所示,设一个周期内TEC两端电压Uo近似不变,UAB为桥臂中点间电压,US为桥臂供电电压,IL,为电感电流,IOMAX为驱动器最大输出电流,D为占空比,TS为开关周期,fs为开关频率,L=L1=L2为滤波电感,C=C1=C2为滤波电容,RTEC为TEC的等效电阻,则由LC输出滤波电路和桥臂两端电压和滤波电感电流波形可得
△It=(US-Uo)DTS/(2L)
=(Us+Uo)9(l—D)Ts/(2L) (1)
因为Uo=(2D一1)Us,
所以△IL=D(1一D)TsUs/L。
当D=0.5时△IL有最大值△ILMAX=Us/(4fsL)。可选择L使纹波电流△IL,,不大于LOMAX的(10~20)%。由于TEC所能达到的温差随纹波电流的增大会减小,其近似的降额公式为
dθ/dθMAX=1/(1+N2) (2)
式中:dθ是TEC在电流有纹波下所能达到的温差;
dθMAX是TEC在直流电流下所能达到的最大温差;
N是电流纹波系数,通常制造商要求电流纹波系数不得大于10%。
由于TEC纹波电流的推导较复杂,这里仪给出文献里的一个估算公式供参考。
 式中:fs为振荡器的频率也等于PWM电压的开关频率;
L=L1=L2为滤波器的电感量;
C=C1=C2为滤波器的电容量;
RTECTEC的等效电阻;
VTEC为TEC的直流压降;
ESR为滤波电容的等效串联电阻;
VS为全桥供电电源电压。
式(3)表明在滤波电感、供电电压、模块等确定的情况下,提高开关频率、增加滤波电容容量,减小滤波电容的等效串联电阻可减小电流纹波。当然需要权衡由此增加的电路板面积、功耗等因素来最终确定L、C、fs的值。
4 实验结果
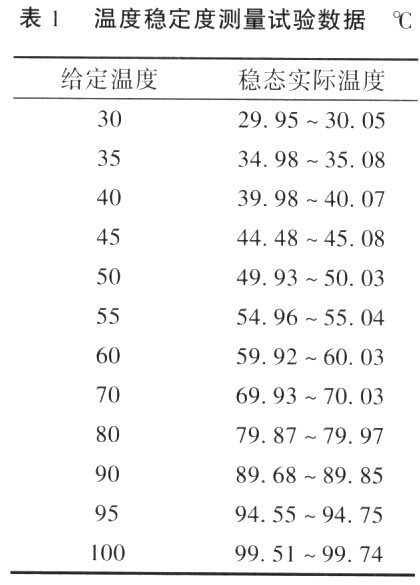
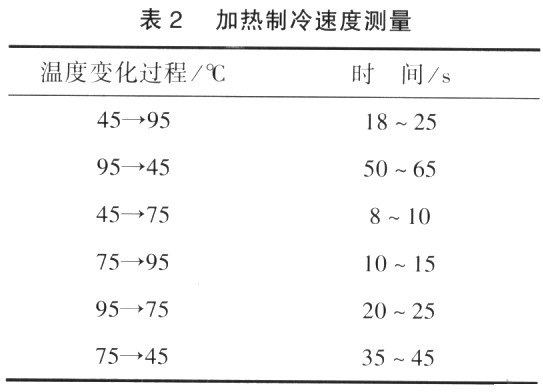
分别对直接电流控制方式(PID由89C52完成)和温度给定控制方式(PID由模拟电路完成)进行了实验,发现直接电流控制方式,数字控制算法较难设计,控制效果并不比模拟PID控制方式好(仅达到%26;#177;O.3℃)。仅采用适当增益的比例调节器(有差控制),并适当对高频增益进行衰减,用89C52给定温度不做任何调节(即数字控制器开环),短期温度稳定度可达%26;#177;O.15℃左右,但数字给定温度开环控制模拟调节存在温度可能不在设定点上(一方面是相对于上位PC机给定温度,初始D/A给定值不是很准确,另一方面模拟电路存在漂移),长期稳定度不好,为此我们利用89C52进行数字目标控制,其目的是,即使初始D/A数字给定值不是很准确,差1℃~2℃,通过程序判断,自动调整89C52送到D/A的数字量,使最终控制温度达到上位PC机的温度给定值,实验发现,在算法合理的情况下,甚至能提高温度稳定度。采取以上措施,温度稳定度小于%26;#177;O.15℃(若改进算法应还有提高的可能,实验中已观察到这一点,若温度控制范围不大更是如此),温度偏移量(温度准确度)小于%26;#177;O.5℃。图8及图9,表1及表2是实验结果。
式中:fs为振荡器的频率也等于PWM电压的开关频率;
L=L1=L2为滤波器的电感量;
C=C1=C2为滤波器的电容量;
RTECTEC的等效电阻;
VTEC为TEC的直流压降;
ESR为滤波电容的等效串联电阻;
VS为全桥供电电源电压。
式(3)表明在滤波电感、供电电压、模块等确定的情况下,提高开关频率、增加滤波电容容量,减小滤波电容的等效串联电阻可减小电流纹波。当然需要权衡由此增加的电路板面积、功耗等因素来最终确定L、C、fs的值。
4 实验结果
分别对直接电流控制方式(PID由89C52完成)和温度给定控制方式(PID由模拟电路完成)进行了实验,发现直接电流控制方式,数字控制算法较难设计,控制效果并不比模拟PID控制方式好(仅达到%26;#177;O.3℃)。仅采用适当增益的比例调节器(有差控制),并适当对高频增益进行衰减,用89C52给定温度不做任何调节(即数字控制器开环),短期温度稳定度可达%26;#177;O.15℃左右,但数字给定温度开环控制模拟调节存在温度可能不在设定点上(一方面是相对于上位PC机给定温度,初始D/A给定值不是很准确,另一方面模拟电路存在漂移),长期稳定度不好,为此我们利用89C52进行数字目标控制,其目的是,即使初始D/A数字给定值不是很准确,差1℃~2℃,通过程序判断,自动调整89C52送到D/A的数字量,使最终控制温度达到上位PC机的温度给定值,实验发现,在算法合理的情况下,甚至能提高温度稳定度。采取以上措施,温度稳定度小于%26;#177;O.15℃(若改进算法应还有提高的可能,实验中已观察到这一点,若温度控制范围不大更是如此),温度偏移量(温度准确度)小于%26;#177;O.5℃。图8及图9,表1及表2是实验结果。

 5 结语
设计了输出%26;#177;24V/20A(实测%26;#177;25V/17.5A)双极性电流驱动器,对仪器中由TEC构成的加热制冷模块进行控制,并采用89C52进行PID温度控制,最大加热制冷速度>l℃/s,温度稳定度<%26;#177;O.15℃,温度偏移量<%26;#177;O.5℃,温度控制范围为45℃~100℃。实践证明采用UC3638构成双极性电流驱动控制器用于TEC温度控制是可行的。
5 结语
设计了输出%26;#177;24V/20A(实测%26;#177;25V/17.5A)双极性电流驱动器,对仪器中由TEC构成的加热制冷模块进行控制,并采用89C52进行PID温度控制,最大加热制冷速度>l℃/s,温度稳定度<%26;#177;O.15℃,温度偏移量<%26;#177;O.5℃,温度控制范围为45℃~100℃。实践证明采用UC3638构成双极性电流驱动控制器用于TEC温度控制是可行的。
编辑: 引用地址:基于UC3638的PWM控制器在TEC温控中的应用
2 UC3638芯片介绍
UC3638增强型直流电机PWM控制器,适用于各类直流电机PWM驱动控制,还可用来设计需要单向或双向电流驱动的功率放大器,其内部结构如图2所示。它包含有模拟信号误差放大器和PWM调制器;根据误差放大输入信号的极性和大小,PWM调制器输出两路不同极性和宽度的脉冲串。因此,它可用于双向调速系统和其他需要单极性或双极性可调电压或电流的场合。由于改进了电路设计和提高了集成度,UC3638减少了许多外围电路元件。它还有以下特点:电路速度有了显著提高,内部有可编程高频三角波发生器,高转换速率误差放大器,高速PWM比较器,PWM开关频率可达500kHz。增加的5倍固定增益差分电流放大器和误差放大器配合,可构成平均电流反馈控制电路以提高系统响应速度(电流型控制)。两路60V/50mA集电极开路输出以驱动全桥上管,两路500mA图腾柱输出可驱动全桥下管。可编程引脚AREFIN允许单电源或双电源工作。振荡器斜波幅度和PWM死区经5V分压,由设置引脚PVSET(振荡器斜波幅度设置)和DB(PWM死区设置)设定。另外还包括精确的5V参考电压输出,欠压锁定,双向逐周峰值电流保护,遥控关断引脚(可兼做软启动)。
3 双极性电流控制器的原理和设计
如图3所示,由隔离放大器的电流控制信号Vc经R1.,同来自外加的差动电流放大器A1B的电流反馈信号经R3相加,经UC3638内部的误差放大器进行电流PT凋节(R2,C1,C2构成补偿网络),再经内部PWM比较器等形成PWM控制信号Aoutl.Aout2,B0utl,Bout2,经VQ1~VQ8形成驱动信号AoutL,AoutH,BoutL,BoutH,驱动图4中VT1~VT2成的全桥,输出PWM功率信号,再经L1,L2,C11.C12滤波得到双极性电流(电压)对TEC(图4中RTEC)供电。桥路电流信号由电阻RS1,RS2(实际为多个低阻值电阻并联)检测,经A1A,A1B构成的反相放大器放大再送至图3中的A1B构成平均电流反馈。
3.l UC3638外围电路设计
1)如图3及图5所示,假设UC3638供电电源为%26;#177;12V,三角波发生器振幅为10Vp-p,按UC3638的设计要求,脚PVSET的电平按如下设置:VPK一VVLY=5VIPVSET,VIPVSET=VR6=10/5=2 V,取R6为10 kΩ,IR5=IR6=2/(10%26;#215;lO3)=O.2 mA, R5=(VAREF一VR6)/IR6=(5-2)/(O.2%26;#215;lO-3)=15 kΩ。R5取信以实际调试为准。
2)如果取1V死区电压,5-VDB=1V,VDB=4V,取R12为10 kΩ,IR1=IR12=VDB/R12=4/R12=4/10%26;#215;103=O.4mA.R11=(5-VDV)/IR11=1/(O.4%26;#215;10-3)=2.5 kΩ。R11取值以实际调试为准。并联C6在R12上可获得软启动特性(即上电后死区由大逐渐减小)。
3)取VCC一VSD=8V(小于2.5 V进入软启动状态),R14=10 kΩ,IR14=IR15=8/10%26;#215;l0-3=O 8 mA,R15=(2%26;#215;VCC-VR14)/H15=(24-8)/(O.8%26;#215;10-3)=20 kΩ。为现可获得芯片延迟使能特性:在R14上并联电容C8.
4)取频率发生器外接电容C4为1000 pF,由于f/=l/(5%26;#215;RT%26;#215;CT),取f=35 kHz,R13=RT=1/(5%26;#215;f%26;#215;GT)=1/(5%26;#215;35kHz%26;#215;1000 pF)≈5.8kΩ。取R13为6.2 kΩ。当RT=6.2 kΩl时,脚RT的充电电流限制为2.4 V/6.2 kΩ=O 387 mA。小于规定的最大1mA限制。
5)验算死区时间tDB=VDB/[(VPK-VVLY)%26;#215;=(5-VDB)%26;#215;RT%26;#215;CT/VPVSET=1%26;#215;6.8 kΩ%26;#215;1000 pF/2V=3.4μs。可见死区时间远大于MOSFET的开关时间,实际应用中可根据输出波形调整R11。
3.2 电流检测电路设计
在实际应用中,由于需要对多个TEC模块串并联使用以提高加热制冷功率,所以驱动输出电压电流较大(最大设计值%26;#177;24V/20A,实测%26;#177;25V/17.5A)。为提高效率以减小发热,我们采用多个低阻值电阻并联作为电流检测取样电阻。这样,原有UC3638内部的电流检测差分放大器放大倍数不够,须外加放大器。但实验发现,PWM驱动器工作时,由于电路高速开关切换产牛很大的dv/di和di/dt,由此产生共模尖峰电压,从而引起很大的地线干扰。在采取了减小干扰的各种措施后,因控制器内部的电流限制阈值较低(%26;#177;2.5V),很容易引起驱动电路自锁无输出。于是,我们根据其内部电路通过外加运放(图3中A1B和图4中A1A及A1B)的方式实现高倍率的差分电流放大和电平移位(将CS+和CS一短路接地以屏蔽内部差分放大器),并将最后的差分电流放大输出通过图3中电阻R4接至CSOUT以实现最大电流限制功能。同时在信号通路上加上小电容以滤除高频干扰。另外,在MOSFFT栅源极间加电容以减小电路开关切换和密勒电容对栅极驱动信号的不利影响,该措施和死区形成电路一起使驱动器可靠工作,不会发生上下管直通现象,并有效地提高了控制电路的稳定性。
3.3 驱动和全桥电路
采用NPN和PNP互补开关管对PWM输出控制信号进行放大和电平移位。采用P沟道管IRFl4905作为上管,N沟道管IRF3205作为下管构成全桥电路。值得注意的是,当要求占空比最大值达到l时,不能使用普通的泵电路(常用于驱动N沟道上管)对上管驱动。
3.4 输出LC滤波电路设计
如图6及图7所示,设一个周期内TEC两端电压Uo近似不变,UAB为桥臂中点间电压,US为桥臂供电电压,IL,为电感电流,IOMAX为驱动器最大输出电流,D为占空比,TS为开关周期,fs为开关频率,L=L1=L2为滤波电感,C=C1=C2为滤波电容,RTEC为TEC的等效电阻,则由LC输出滤波电路和桥臂两端电压和滤波电感电流波形可得
△It=(US-Uo)DTS/(2L)
=(Us+Uo)9(l—D)Ts/(2L) (1)
因为Uo=(2D一1)Us,
所以△IL=D(1一D)TsUs/L。
当D=0.5时△IL有最大值△ILMAX=Us/(4fsL)。可选择L使纹波电流△IL,,不大于LOMAX的(10~20)%。由于TEC所能达到的温差随纹波电流的增大会减小,其近似的降额公式为
dθ/dθMAX=1/(1+N2) (2)
式中:dθ是TEC在电流有纹波下所能达到的温差;
dθMAX是TEC在直流电流下所能达到的最大温差;
N是电流纹波系数,通常制造商要求电流纹波系数不得大于10%。
由于TEC纹波电流的推导较复杂,这里仪给出文献里的一个估算公式供参考。
式中:fs为振荡器的频率也等于PWM电压的开关频率;
L=L1=L2为滤波器的电感量;
C=C1=C2为滤波器的电容量;
RTECTEC的等效电阻;
VTEC为TEC的直流压降;
ESR为滤波电容的等效串联电阻;
VS为全桥供电电源电压。
式(3)表明在滤波电感、供电电压、模块等确定的情况下,提高开关频率、增加滤波电容容量,减小滤波电容的等效串联电阻可减小电流纹波。当然需要权衡由此增加的电路板面积、功耗等因素来最终确定L、C、fs的值。
4 实验结果
分别对直接电流控制方式(PID由89C52完成)和温度给定控制方式(PID由模拟电路完成)进行了实验,发现直接电流控制方式,数字控制算法较难设计,控制效果并不比模拟PID控制方式好(仅达到%26;#177;O.3℃)。仅采用适当增益的比例调节器(有差控制),并适当对高频增益进行衰减,用89C52给定温度不做任何调节(即数字控制器开环),短期温度稳定度可达%26;#177;O.15℃左右,但数字给定温度开环控制模拟调节存在温度可能不在设定点上(一方面是相对于上位PC机给定温度,初始D/A给定值不是很准确,另一方面模拟电路存在漂移),长期稳定度不好,为此我们利用89C52进行数字目标控制,其目的是,即使初始D/A数字给定值不是很准确,差1℃~2℃,通过程序判断,自动调整89C52送到D/A的数字量,使最终控制温度达到上位PC机的温度给定值,实验发现,在算法合理的情况下,甚至能提高温度稳定度。采取以上措施,温度稳定度小于%26;#177;O.15℃(若改进算法应还有提高的可能,实验中已观察到这一点,若温度控制范围不大更是如此),温度偏移量(温度准确度)小于%26;#177;O.5℃。图8及图9,表1及表2是实验结果。
5 结语
设计了输出%26;#177;24V/20A(实测%26;#177;25V/17.5A)双极性电流驱动器,对仪器中由TEC构成的加热制冷模块进行控制,并采用89C52进行PID温度控制,最大加热制冷速度>l℃/s,温度稳定度<%26;#177;O.15℃,温度偏移量<%26;#177;O.5℃,温度控制范围为45℃~100℃。实践证明采用UC3638构成双极性电流驱动控制器用于TEC温度控制是可行的。
上一篇:二级数据矩阵码在飞机发动机上的应用
下一篇:语意识别与智能机器人设计
- 热门资源推荐
- 热门放大器推荐
 HA2-2522-8
HA2-2522-8
最新传感技术文章
更多精选电路图
更多热门文章
更多每日新闻
更多往期活动
厂商技术中心
随便看看




 京公网安备 11010802033920号
京公网安备 11010802033920号