摘要:介绍了利用GPS OEM板对航标灯进行位置测量与监控的情况,并根据GPS OEM板误差源对测量数据进行有效的数值分析处理, 同时根据CPS OEM板测量读数的特征采取了相应的控制策略,取得了良好的实际应用效果,为航道的数字化、自动化建设奠定了基础。
关键词:CPS 数字化航道 监控
随着电子技术和通信技术的发展,无线通信以及遥测遥控系统被广泛应用于工业、农业、航空、航海等各个领域中。出海口及内陆河道作为航海航运重要的一部分,其管理维护方法及管理质量对我国航运业的影响至关重要。发展至今,电子通信产品的可靠性越来越高,成本越来越低,这使得航道管理维护自动化、数字化的实现成为可能。GPS(全球定位系统)是美国国防部于1973年开始研制的卫星全球导航定位系统,主要为其海陆空三军服务。近几年来已逐步应用于民用设施及测绘技术中,同时美国军方逐步放松对民用GPS设备的限制,使得民用GPS达到了比较高的定位精度。利用GPS对航道航标等设备进行位置遥测与监控是一种比较理想的方法。本文以航标监控的具体要求为标准,把整个航道管理区域内需监控的目标物组成一个GPS遥测网,并利用各种滤波方法消除相应的误差,提高了遥测数据的准确性。
 1 GPS OEM板与航道GPS遥测网
1.1 GPS OEM板
GPS OEM板是GPS接收机中一个重要的组成部分,它具有成本低、体积小、重量轻、产品种类多、性价比高等很多优点,因此被广泛应用于定位及导航领域中。它的定位精度已经能达到几十米,甚至可以达到10米以内的精度。本课题所用到的Thales集团导航定位公司的GPS OEM B12就是一款性价比很高的产品。
1.2 航道监测
航道是交通网络中一个重要组成部分,其安全质量直接影响着整个交通系统。以前航道部门专门在航道的堤岸、桥头、故障物旁边安装各种航标灯作为警戒导航装置,各种船只可以根据航标灯光及其闪动频率来确定自己的航向。至于航标的维护,则是航道部门每隔一定时间派巡航船只对各航标灯进行目测和实测。因为航道中航标灯比较多,这就使得这种巡航航道的维护方式操作繁琐,运作维护成本高,安全质量低。
1.3 航道GPS遥测网
航道中航标遥测网主要是对水标(抛锚在水中的航标)进行遥测以便对其位置进行实时监控(其系统原理图如图1所示);
1 GPS OEM板与航道GPS遥测网
1.1 GPS OEM板
GPS OEM板是GPS接收机中一个重要的组成部分,它具有成本低、体积小、重量轻、产品种类多、性价比高等很多优点,因此被广泛应用于定位及导航领域中。它的定位精度已经能达到几十米,甚至可以达到10米以内的精度。本课题所用到的Thales集团导航定位公司的GPS OEM B12就是一款性价比很高的产品。
1.2 航道监测
航道是交通网络中一个重要组成部分,其安全质量直接影响着整个交通系统。以前航道部门专门在航道的堤岸、桥头、故障物旁边安装各种航标灯作为警戒导航装置,各种船只可以根据航标灯光及其闪动频率来确定自己的航向。至于航标的维护,则是航道部门每隔一定时间派巡航船只对各航标灯进行目测和实测。因为航道中航标灯比较多,这就使得这种巡航航道的维护方式操作繁琐,运作维护成本高,安全质量低。
1.3 航道GPS遥测网
航道中航标遥测网主要是对水标(抛锚在水中的航标)进行遥测以便对其位置进行实时监控(其系统原理图如图1所示);
 而岸标(固定在堤岸上的航标)由于其位置不变所以无需GPS遥测。GPS在航标遥测网中的实际任务就是实时测量航标灯所在位置,并与预先划定的位置范围进行比较,如果漂离出所标定的范围,即通过GSM网发送警报信息给监控中心,以便于监控中心采取相应措施。这将就可以排除航标灯因船只碰撞、水流冲击等原因而漂离引起事故。而每个航道管理区域内有成百个水标,因此在提高安全质量的同时也需考虑成本投入。根据航道的具体要求,其精度并不需要精确到米级以下,因此不需要价格昂贵的高精度GPS接收机及测量仪。同时将GPS OEM板与水标进行捆绑,可以以相对较低的成本取得高质量的管理效果。本系统使用的是法国Thales公司生产的B12 GPS OEM板模块,它具有并行的12个接收通道(即同时可以接收12颗定位卫星传送的星历信息)。
2 误差分析、数值处理及控制流程
2.1 误差分析
GPS测量的误差主要包括卫星部分、信号传播、信号接收等各个方面带来的误差,但从性质上来讲可以归纳为系统误差和随机误差两部分。其中系统误差主要包括卫星的星历误差、卫星钟差、接收机钟差以及大气折射的误差等。随机误差主要包括信号的多路径效应等。虽然系统误差比随机误差要大些,其消除主要靠接收机本身[1],但是它总是有一定的规律可循的,所以采取一定的措施进行处理对整个系统的可靠性都是非常重要的。由于水面多路径效应比较严重,所以使用精密相位中心、具厄流圈的测量天线是消除由于水面环境所引起误差的一个重要方法。
2.2 数值处理
针对各种误差,测量技术中已应用了各种滤波方法来消除或减弱各种误差的影响,例如中值滤波法、算术平均滤波法、进退递推滤波法等。通过大量的测量试验与观察分析发现,随着时间的不同、卫星分布状态的改变以及天气的变化,GPS所读数据都有不同曲线方向的飘移,但是其分布状态接近于正态分布,所以采用一些滤波方法对数据进行处理对整个测量系统精度的提高至关重要。以下是系统中所用到的几种滤波方法。
而岸标(固定在堤岸上的航标)由于其位置不变所以无需GPS遥测。GPS在航标遥测网中的实际任务就是实时测量航标灯所在位置,并与预先划定的位置范围进行比较,如果漂离出所标定的范围,即通过GSM网发送警报信息给监控中心,以便于监控中心采取相应措施。这将就可以排除航标灯因船只碰撞、水流冲击等原因而漂离引起事故。而每个航道管理区域内有成百个水标,因此在提高安全质量的同时也需考虑成本投入。根据航道的具体要求,其精度并不需要精确到米级以下,因此不需要价格昂贵的高精度GPS接收机及测量仪。同时将GPS OEM板与水标进行捆绑,可以以相对较低的成本取得高质量的管理效果。本系统使用的是法国Thales公司生产的B12 GPS OEM板模块,它具有并行的12个接收通道(即同时可以接收12颗定位卫星传送的星历信息)。
2 误差分析、数值处理及控制流程
2.1 误差分析
GPS测量的误差主要包括卫星部分、信号传播、信号接收等各个方面带来的误差,但从性质上来讲可以归纳为系统误差和随机误差两部分。其中系统误差主要包括卫星的星历误差、卫星钟差、接收机钟差以及大气折射的误差等。随机误差主要包括信号的多路径效应等。虽然系统误差比随机误差要大些,其消除主要靠接收机本身[1],但是它总是有一定的规律可循的,所以采取一定的措施进行处理对整个系统的可靠性都是非常重要的。由于水面多路径效应比较严重,所以使用精密相位中心、具厄流圈的测量天线是消除由于水面环境所引起误差的一个重要方法。
2.2 数值处理
针对各种误差,测量技术中已应用了各种滤波方法来消除或减弱各种误差的影响,例如中值滤波法、算术平均滤波法、进退递推滤波法等。通过大量的测量试验与观察分析发现,随着时间的不同、卫星分布状态的改变以及天气的变化,GPS所读数据都有不同曲线方向的飘移,但是其分布状态接近于正态分布,所以采用一些滤波方法对数据进行处理对整个测量系统精度的提高至关重要。以下是系统中所用到的几种滤波方法。
 中值滤波法:即对所测三个数据进行排序,去掉最大和最小的一个,取中间值作为测量值。基于这种思想,本文在终端控制器上电初始化的时候连续测量n(可调)次经纬度数据并将它们从小到大进行排队,去掉最大的m次数据和最小的m次数据,以中间的n-2m次数据作为基准,并存于一个存储单元。由于航道遥测系统对实时性要求并不高,所以把n尽量取得大些。设n次所读数据和为Xn,经排序后最小m次数据和为XmMIN,最大m次数据和为XmMAX,则:
Xsum=Xn-XmMIN-XmMAX
把Xsum存于存储单元作为后续处理方法的和基准。 算术平均滤波法:即采样一定量的数据,然后对其求平均值作为测量估计值,这样可以使得偏离真值的正负误差相消,从而使测量值更接近真实值。本课题将前面所取得的n-2m次测量数据作算术平均,且存于固定的算术平均值存储单元,并根据以后所读数据进行实时修正。这样有:
X=(Xswn)/(n-2m);Xi=(Xsumi)/(n-2m).
其中,X是初始化时所求平均值,作为一个平均基准存于存储单元。Xi是每读一次数据所求平均值,作为位置评估值应用于位置飘移判断控制中。
中值滤波法:即对所测三个数据进行排序,去掉最大和最小的一个,取中间值作为测量值。基于这种思想,本文在终端控制器上电初始化的时候连续测量n(可调)次经纬度数据并将它们从小到大进行排队,去掉最大的m次数据和最小的m次数据,以中间的n-2m次数据作为基准,并存于一个存储单元。由于航道遥测系统对实时性要求并不高,所以把n尽量取得大些。设n次所读数据和为Xn,经排序后最小m次数据和为XmMIN,最大m次数据和为XmMAX,则:
Xsum=Xn-XmMIN-XmMAX
把Xsum存于存储单元作为后续处理方法的和基准。 算术平均滤波法:即采样一定量的数据,然后对其求平均值作为测量估计值,这样可以使得偏离真值的正负误差相消,从而使测量值更接近真实值。本课题将前面所取得的n-2m次测量数据作算术平均,且存于固定的算术平均值存储单元,并根据以后所读数据进行实时修正。这样有:
X=(Xswn)/(n-2m);Xi=(Xsumi)/(n-2m).
其中,X是初始化时所求平均值,作为一个平均基准存于存储单元。Xi是每读一次数据所求平均值,作为位置评估值应用于位置飘移判断控制中。
 进退递推滤波法:前面两者都是读取一定数据以后再作后处理,而测量过程中必须对所测数据进行实时处理。所以,所测量经纬度的变化趋势必须反应出来,以便航标因为意外而漂出所给定范围时能实时向监控中心发送警报信息,从而进行修正。本文根据实验与观察的结果,采取进一新数退一平均数的进退递推滤波方法,即:
Xswni=Xsum_i-1+Xi-1+xi
限幅滤波法:在测量过程中,常常会碰到偏离中值较远的粗大误差。这对经过前面几种滤波法处理后的数据基准会产生较大的冲击,限幅滤波法就是针对这一思想的。设定一个阈值,当所测数据与基准数据比较后,差值超过阈值就认为是粗大误差并舍掉。但是本课题中如果航标灯因意外而漂出很远,就必须能识别出来,而不能当粗大误差全部舍掉。所以在控制程序中专门设计了一计数器对舍掉比率进行计数,如果舍掉比率大于某一值则重新初始化,即重新读取n-2m次的和基准及其算术平均基准。
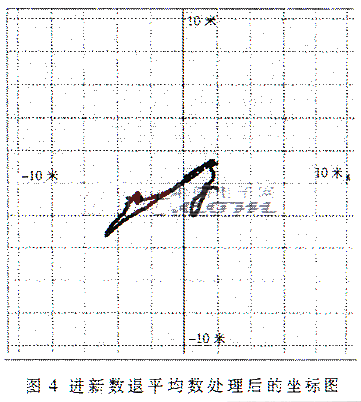
图2、图3、图4分别是对利用Visual Basic6.0开发的数据采集与处理程序采集的10小时GPS数据进行几种数据处理后的坐标示意图(其中,横坐标、纵坐标分别表示经、纬度)。从这三个图中可以看出,从图2到图4,数据收敛性依次增强,可见综合几种滤波法于数据处理中,将大大减少误差,提高系统精度。
进退递推滤波法:前面两者都是读取一定数据以后再作后处理,而测量过程中必须对所测数据进行实时处理。所以,所测量经纬度的变化趋势必须反应出来,以便航标因为意外而漂出所给定范围时能实时向监控中心发送警报信息,从而进行修正。本文根据实验与观察的结果,采取进一新数退一平均数的进退递推滤波方法,即:
Xswni=Xsum_i-1+Xi-1+xi
限幅滤波法:在测量过程中,常常会碰到偏离中值较远的粗大误差。这对经过前面几种滤波法处理后的数据基准会产生较大的冲击,限幅滤波法就是针对这一思想的。设定一个阈值,当所测数据与基准数据比较后,差值超过阈值就认为是粗大误差并舍掉。但是本课题中如果航标灯因意外而漂出很远,就必须能识别出来,而不能当粗大误差全部舍掉。所以在控制程序中专门设计了一计数器对舍掉比率进行计数,如果舍掉比率大于某一值则重新初始化,即重新读取n-2m次的和基准及其算术平均基准。
图2、图3、图4分别是对利用Visual Basic6.0开发的数据采集与处理程序采集的10小时GPS数据进行几种数据处理后的坐标示意图(其中,横坐标、纵坐标分别表示经、纬度)。从这三个图中可以看出,从图2到图4,数据收敛性依次增强,可见综合几种滤波法于数据处理中,将大大减少误差,提高系统精度。
 2.3 控制流程
系统控制流程图如图5所示。
本文通过大量的实验与测量观察,深究了GPS OEM板的误差来源及规律,并采取了相应的数值处理方法及控制策略,大大提高了GPS OEM板在遥测系统中的应用价值和可靠性,保证了航道维护中标灯的位置遥测监控的准确性与安全性,是GPS OEM板—个很有意义的应用实例。
2.3 控制流程
系统控制流程图如图5所示。
本文通过大量的实验与测量观察,深究了GPS OEM板的误差来源及规律,并采取了相应的数值处理方法及控制策略,大大提高了GPS OEM板在遥测系统中的应用价值和可靠性,保证了航道维护中标灯的位置遥测监控的准确性与安全性,是GPS OEM板—个很有意义的应用实例。
引用地址:基于GPS的航标遥测系统数值优化方法
1 GPS OEM板与航道GPS遥测网
1.1 GPS OEM板
GPS OEM板是GPS接收机中一个重要的组成部分,它具有成本低、体积小、重量轻、产品种类多、性价比高等很多优点,因此被广泛应用于定位及导航领域中。它的定位精度已经能达到几十米,甚至可以达到10米以内的精度。本课题所用到的Thales集团导航定位公司的GPS OEM B12就是一款性价比很高的产品。
1.2 航道监测
航道是交通网络中一个重要组成部分,其安全质量直接影响着整个交通系统。以前航道部门专门在航道的堤岸、桥头、故障物旁边安装各种航标灯作为警戒导航装置,各种船只可以根据航标灯光及其闪动频率来确定自己的航向。至于航标的维护,则是航道部门每隔一定时间派巡航船只对各航标灯进行目测和实测。因为航道中航标灯比较多,这就使得这种巡航航道的维护方式操作繁琐,运作维护成本高,安全质量低。
1.3 航道GPS遥测网
航道中航标遥测网主要是对水标(抛锚在水中的航标)进行遥测以便对其位置进行实时监控(其系统原理图如图1所示);
而岸标(固定在堤岸上的航标)由于其位置不变所以无需GPS遥测。GPS在航标遥测网中的实际任务就是实时测量航标灯所在位置,并与预先划定的位置范围进行比较,如果漂离出所标定的范围,即通过GSM网发送警报信息给监控中心,以便于监控中心采取相应措施。这将就可以排除航标灯因船只碰撞、水流冲击等原因而漂离引起事故。而每个航道管理区域内有成百个水标,因此在提高安全质量的同时也需考虑成本投入。根据航道的具体要求,其精度并不需要精确到米级以下,因此不需要价格昂贵的高精度GPS接收机及测量仪。同时将GPS OEM板与水标进行捆绑,可以以相对较低的成本取得高质量的管理效果。本系统使用的是法国Thales公司生产的B12 GPS OEM板模块,它具有并行的12个接收通道(即同时可以接收12颗定位卫星传送的星历信息)。
2 误差分析、数值处理及控制流程
2.1 误差分析
GPS测量的误差主要包括卫星部分、信号传播、信号接收等各个方面带来的误差,但从性质上来讲可以归纳为系统误差和随机误差两部分。其中系统误差主要包括卫星的星历误差、卫星钟差、接收机钟差以及大气折射的误差等。随机误差主要包括信号的多路径效应等。虽然系统误差比随机误差要大些,其消除主要靠接收机本身[1],但是它总是有一定的规律可循的,所以采取一定的措施进行处理对整个系统的可靠性都是非常重要的。由于水面多路径效应比较严重,所以使用精密相位中心、具厄流圈的测量天线是消除由于水面环境所引起误差的一个重要方法。
2.2 数值处理
针对各种误差,测量技术中已应用了各种滤波方法来消除或减弱各种误差的影响,例如中值滤波法、算术平均滤波法、进退递推滤波法等。通过大量的测量试验与观察分析发现,随着时间的不同、卫星分布状态的改变以及天气的变化,GPS所读数据都有不同曲线方向的飘移,但是其分布状态接近于正态分布,所以采用一些滤波方法对数据进行处理对整个测量系统精度的提高至关重要。以下是系统中所用到的几种滤波方法。
中值滤波法:即对所测三个数据进行排序,去掉最大和最小的一个,取中间值作为测量值。基于这种思想,本文在终端控制器上电初始化的时候连续测量n(可调)次经纬度数据并将它们从小到大进行排队,去掉最大的m次数据和最小的m次数据,以中间的n-2m次数据作为基准,并存于一个存储单元。由于航道遥测系统对实时性要求并不高,所以把n尽量取得大些。设n次所读数据和为Xn,经排序后最小m次数据和为XmMIN,最大m次数据和为XmMAX,则:
Xsum=Xn-XmMIN-XmMAX
把Xsum存于存储单元作为后续处理方法的和基准。 算术平均滤波法:即采样一定量的数据,然后对其求平均值作为测量估计值,这样可以使得偏离真值的正负误差相消,从而使测量值更接近真实值。本课题将前面所取得的n-2m次测量数据作算术平均,且存于固定的算术平均值存储单元,并根据以后所读数据进行实时修正。这样有:
X=(Xswn)/(n-2m);Xi=(Xsumi)/(n-2m).
其中,X是初始化时所求平均值,作为一个平均基准存于存储单元。Xi是每读一次数据所求平均值,作为位置评估值应用于位置飘移判断控制中。
进退递推滤波法:前面两者都是读取一定数据以后再作后处理,而测量过程中必须对所测数据进行实时处理。所以,所测量经纬度的变化趋势必须反应出来,以便航标因为意外而漂出所给定范围时能实时向监控中心发送警报信息,从而进行修正。本文根据实验与观察的结果,采取进一新数退一平均数的进退递推滤波方法,即:
Xswni=Xsum_i-1+Xi-1+xi
限幅滤波法:在测量过程中,常常会碰到偏离中值较远的粗大误差。这对经过前面几种滤波法处理后的数据基准会产生较大的冲击,限幅滤波法就是针对这一思想的。设定一个阈值,当所测数据与基准数据比较后,差值超过阈值就认为是粗大误差并舍掉。但是本课题中如果航标灯因意外而漂出很远,就必须能识别出来,而不能当粗大误差全部舍掉。所以在控制程序中专门设计了一计数器对舍掉比率进行计数,如果舍掉比率大于某一值则重新初始化,即重新读取n-2m次的和基准及其算术平均基准。
图2、图3、图4分别是对利用Visual Basic6.0开发的数据采集与处理程序采集的10小时GPS数据进行几种数据处理后的坐标示意图(其中,横坐标、纵坐标分别表示经、纬度)。从这三个图中可以看出,从图2到图4,数据收敛性依次增强,可见综合几种滤波法于数据处理中,将大大减少误差,提高系统精度。
2.3 控制流程
系统控制流程图如图5所示。
本文通过大量的实验与测量观察,深究了GPS OEM板的误差来源及规律,并采取了相应的数值处理方法及控制策略,大大提高了GPS OEM板在遥测系统中的应用价值和可靠性,保证了航道维护中标灯的位置遥测监控的准确性与安全性,是GPS OEM板—个很有意义的应用实例。
上一篇:遥控LED广告牌
下一篇:嵌入式短程无线通信工程系统硬件设计
- 热门资源推荐
- 热门放大器推荐
 Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用 LM321MDC
LM321MDC
小广播
热门活动
换一批
更多

最新网络通信文章
- 芯原推出新一代高性能Vitality架构GPU IP系列 支持DirectX 12和先进的计算能力
- 应对 AI 时代的云工作负载,开发者正加速向 Arm 架构迁移
- NVIDIA 推出高性价比的生成式 AI 超级计算机
- Gartner发布2025年影响基础设施和运营的重要趋势
- 智谱清言英特尔酷睿Ultra专享版发布,离线模型玩转AIPC
- Quobly与意法半导体建立战略合作, 加快量子处理器制造进程,实现大型量子计算解决方
- RTI Connext Drive参展CES 2025,以领先通信框架加速SDV开发
- 黑莓 1.6 亿美元甩卖网络安全业务 Cylance,远低于其 14 亿美元的收购价
- eIQ® Time Series Studio简介:简化边缘 AI 开发






更多热门文章
更多每日新闻
更多往期活动
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号