1 前言
电动汽车中的电控单元多、内部空间小、环境干扰大,对控制系统、通信系统提出了更高的要求。CAN 以其良好的运行特性,极高的可靠性和独特的设计,特别适合电动汽车各电子控制单元之间的通信。为了更好地在实验室进行研究,建立了一个功能比较完善的试验测试平台,能够对CAN 总线系统及其网络协议进行研究。首先,基于DSP 的开发设计了电机控制器节点的通信程序。其次,深入了解CAN 总线在电动汽车中的应用需求,设计了CAN总线的应用层协议。最后,为检验设计协议的可行性,利用VB6.0 开发了电动汽车的监控系统,并为监控数据建立了数据库,方便管理数据。
2 电机控制器节点的设计
针对电动汽车电机控制器的特点,选用TI 公司的TMS320LF2407 芯片作为电机控制器的处理器。采用模块化的设计思想,编写了电机控制器节点的通信程序,可方便移植到基于DSP 的电机控制器或其他控制单元中。在电动汽车的CAN 总线系统中,电机控制器的实时性要求高,属于高速节点,波特率设为1 兆波特。电机控制器节点主要是接收总线上传来的电机工作模式、SOC、车速、加速踏板位置和制动踏板位置等控制信息,同时发送电机的工作温度、电机故障、工作状态等实时信息。本文中利用DSP2407的邮箱2 作为接收邮箱,邮箱5 作为发送邮箱,20 毫秒定时发送一次。
3 电动汽车监控系统设计
在实验室模拟电动汽车CAN 总线系统,以PC 机(带USB-CAN 模块)作为电动汽车的总控制器。利用CAN-bus 通用测试软件的运行机制和工作原理,设计了基于PC 机的电动汽车CAN 总线技术的监控系统。
3.1 监控系统概述
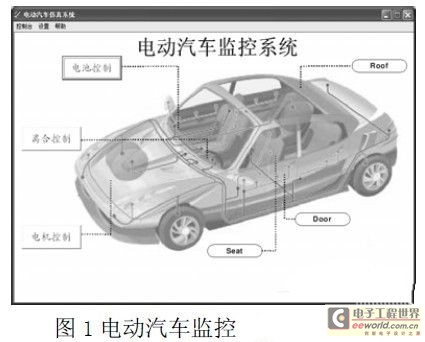
监控系统通过控制台(带USB-CAN 模块的PC 机)对电机控制器、电池控制器以及离合控制器进行监控。运行主界面如图1 所示。能根据需要在CAN 总线中收发参数,实现对总线各节点的监视和控制。例如,电机参数,包括SOC、车速、故障等级、工作模式、故障代码、工作温度等。监控系统还可根据系统扩展需要,提供创建节点的功能。另外,还提供数据管理功能。在监控系统执行过程中,采集到的数据会被记录到Microsoft Access 数据库中,可以用表格形式实时显视,还可以通过输出按钮由软件Excel 打开。
3.2 监控系统通信协议
在CAN 协议中只定义了数据链路层和物理层两层协议,缺乏对信息处理的规范,而一个完整的网络系统中离不开人机交互的应用进程,所以必须由用户定义应用层协议。根据电动汽车运行的特点,设计了监控系统的通信协议。大体上将电动汽车上各电子控制单元(ECU)分为高速和低速节点两大类。其中高速节点包括电机控制器、发动机控制器、电池控制器、ABS/ASR控制单元和能量管理单元等,在它们的ID 码设置较高的优先级。低速节点包括空调系统、仪表显示系统、车灯系统等。表1 给出了电动汽车各节点之间接收及发送的信号类型。根据电动汽车各节点之间接收及发送的数据,对各节点之间需要交换的信息的类型,所包含的参数以及表示方法有具体的说明。例如在电机控制器节点发送的8 个字节分别定义为:电机转速(双字节)、电机转矩(双字节)、工作温度(单字节)、错误等级及代码(单字节)、工作模式(单字节)还有一个字节作为备用。表1 电动汽车各节点之间接收及发送的数据明。例如在电机控制器节点发送的8 个字节分别定义为:电机转速(双字节)、电机转矩(双字节)、工作温度(单字节)、错误等级及代码(单字节)、工作模式(单字节)还有一个字节作为备用。

3.3 监控系统程序设计
监控系统是要完成对各节点的监控,按照设计需求,可将整个设计分为五个设计窗体,包括主窗体、电机控制器监控窗体、电池控制器监控窗体、离合控制器监控窗体和创建节点窗体,并进行模块化设计。其中创建节点窗体可根据需要方便创建监控窗口,设置节点ID 号和监控变量。监控系统程序设计流程图如图2 所示。

4 监控系统的测试
完成了PC 机的监控系统程序设计后,为了验证程序是否正常工作,同时为了验证设计的下位机DSP 数据采集与通信程序的正确性。在这里将DSP数据采集与通信程序和PC 机程序联合起来进行调试。将双方的波特率设为1M 波特。DSP 节点的测试程序包含A/D 采样(模拟加速踏板位置)和通信程序,DSP 运行后由定时中断(20ms)进行数据采集及处理,将信号通过CAN总线上传到上位机(PC 机)。另一方面,DSP 自动判断是否有PC 机发送来的指令,如电池电压、电池电流、加速踏板位置和工作模式等。上位机接收到数据后,进行处理并交给监控系统进行显示。电机控制器节点的测试界面如图3 所示。

5 结论
为适合电动汽车监控的需求,组建了基于CAN总线的电动汽车仿真测试平台,配备专业测试仪器后可组建CAN-BUS 实验室。该系统具有良好的扩展性,可方便增加需要监控的汽车电子控制单元(ECU)。此外,通过VB 与ACCESS 技术的良好衔接,具有数据实时保存,为后期的数据处理提供条件。为了保证各个消息能及时被相关节点采集并处理,需要对消息的调度策略进行深入研究,进一步优化网络管理,特别是网络故障诊断以及处理机制。
关键字:电动汽车监控 DSP
引用地址:
基于DSP的电动汽车监控平台
推荐阅读最新更新时间:2024-05-02 21:39
基于DSP的移动机器人的设计与实现
智能交通系统(ITS)的概念是美国智能交通学会于1990年提出的,它将先进的信息技术、通信技术、自动控制技术、电子技术及计算机处理技术综合运用于整个运输管理系统中,通过对交通信息的采集、传输和处理,对交通运输进行协调和管理,建立起实时、准确、高效的综合交通运输管理体系,从而提高了交通效率和安全了,实现性交通运输服务和管理的智能化。 智能车辆的导航与定位、自动驾驶与控制和车辆的预警防碰等智能交通系统关键技术的研究,近年来受到国内外越来越广泛的关注,也取得了丰硕的成果。但真正的实验研究还是很少,基本上只进行了仿真试验。鉴于理论上的模拟和实际应用情况可能相差甚远,选择了具有智能性、易扩展性和移动性等优点的车型移动机器人作为I
[嵌入式]
基于DSP的嵌入式通用主动视觉系统
主动视觉(Active Vision)是当今计算机视觉和机器视觉研究领域中的一个热门课题。主动视觉强调的是视觉系统与其所处环境之间的交互作用能力。具体地说,主动视觉系统应具有根据自己在当前环境中所处的状态,如几何位置、姿态、摄像机的成像光学条件等,调整自身各部分的状态参数,使其能够达到一个最佳成像状态,从而使系统能够最方便地完成特定的视觉任务,如动态地跟踪物体的运动。主动视觉系统的研制与开发具有重要意义和广泛的应用前景,如各类导弹的成像导引头、机器人、人机交互研究等。 以往的主动视觉系统大多采用以图形工作站为中心,由图形工作站完成图像的采集、处理、跟踪控制,再通过RS232等接口控制执行机构运动以完成跟踪任务。以图形工作站为中心
[嵌入式]
DSP SPI口和串行EEPROM在变频器中的应用
1 引言 变频器的开发中我们选用TMS320F240芯片做主CPU,TMS320F240系列是美国TI公司于1997年推出的,专为数字电机控制和其它控制应用系统而设计的16位定点数字信号处理器。它将数字信号处理的高速运算功能与面向电机的强大控制能力结合在一起,成为中低端变频器理想的主控芯片。F240片内外设包括双10位A/D转换器,带有锁相环PLL时钟模块,带中断的看门狗定时器模块,串行通信接口SCI及串行外设接口SPI,另外,还集成了一个事件管理模块EVM。因此,TMS320F240基本能满足笔者变频器设计的要求。 变频器有几百甚至上千个参数,这些参数值都要求系统断电后不能丢失,在设计中我们选用非易失性存储器EEPR
[嵌入式]
Socionext获得CEVA图像和视觉DSP授权许可
蜂窝通信、多媒体和无线连接DSP IP平台授权厂商CEVA公司宣布,先进SoC设计技术的新领导厂商Socionext Inc.已经获得CEVA图像和视觉DSP 授权许可,用于助力其最新一代Milbeaut 图像处理LSI芯片,这款芯片主要面向监控、数码单反相机、无人机、运动相机 (action)及其它camera相关的设备。今天发布的MB86S27是首个集成CEVA DSP IP的Milbeaut图像处理器,而且将会很快进入批量生产。 Socionext公司副总裁兼业务集团Ⅲ部主管Mitsugu Naito表示: 在我们的Milbeaut系列图像处理器中集成CEVA图像和视觉DSP IP,可让客户通过采用功能强大的矢
[嵌入式]
浅谈实时信号处理在通信中的具体应用
在当前的DSP市场上,通信设备是其最大的用户,以下是其中的几个例子: (1)数字式蜂房系统 数字式蜂房系统使用通用DSP来实现语音合成(speech synthesis)、纠错编码(error-correction coding)、基带调制解调器(baseband modem)、以及系统控制等功能。 a.语音合成、语音压缩与编码是DSP最早和最广泛的应用项目。在有线和无线通信中,矢量编码器用于将语音信号压缩到有限带宽的信道中。 b.纠错编码。前向纠错(FEC,Forward Error-Correction)方案广泛地使用在电信应用中、用以降低噪声信道中的bit误码率。随着越来越多的数据要通过有限带宽的
[嵌入式]
CEVA全新高性能传感器中枢DSP架构SensPro—助力智能感知发展
CEVA,全球领先的无线连接和智能传感技术的授权许可厂商(NASDAQ:CEVA) 发布业界首个高性能传感器中枢DSP架构SensPro™,设计用于处理情境感知设备中的多种传感器处理和融合工作负载。 SensPro专用处理器可以满足业界对高效处理日益增多的各类传感器的需求,这些传感器是智能手机、机器人、汽车、AR / VR耳机、语音助手、智能家居设备,以及正在通过工业4.0等举措进行革新的新兴工业和医疗应用所需要的。这些传感器包括摄像头、雷达、LiDAR、飞行时间(ToF)、麦克风和惯性测量单元(IMU),它们从图像、声音、RF和运动中生成多种类型和比特率的数据,可用于创建完整的3D情境感知设备。 为了以最高的每瓦性
[物联网]

Tensilica联多家电企巨头设计多模调制调解器
西班牙巴塞罗那,2012年2月29讯 – Tensilica今日宣布,NTT DOCOMO上周发布的第二代多模LTE/HSPA/3G基带芯片设计采用了多个Tensilica的数据处理器(DPU),包括HiFi音频DSP(数字信号处理器)和ConnX BBE16基带DSP。与已经量产并大规模应用于手机和平板电脑的第一代产品一样,第二代多模芯片依然是由NTT DOCOMO牵头,由业界领先的富士通,松下和NEC共同开发的。 Tensilica副总裁兼业务部经理Eric Dewannain 表示:“NTT DOCOMO一直是Tensilica重要的合作伙伴,我们也非常荣幸能够参与其第二代产品设计。通过多标准一体化降低了功耗,同时为下一代
[嵌入式]
用DSP实现新一代磁浮列车悬浮控制器
摘 要 用浮点DSP实现磁浮列车数字控制器克服了传统模拟控制器和数字控制器的缺点和局限性。达到了理想的控制效果。
关键词 磁浮列车 电磁悬浮控制 电磁铁 控制系统 数字信号处理器
由于磁浮列车是脱离轨道运行的所以控制技术与磁浮技术无疑是磁浮列车的关键所在。对磁浮列车控制的一个最基本要求,是要保证磁浮列车能够在各种扰动(外部和内部)作用下仍然具有平衡稳定的悬浮。从磁浮列车的控制手段来看,可以应用模拟电子电路,亦可以应用数字电子计算机。模拟控制具有运算速度快、实时性好等优点,但由于其存在工作稳定性差、精度低、调整困难以及难于实现复杂的控制规律等许多缺点,所以采用高速、高性能的数字控
[传感技术]





 智能仪器设计基础 (王祁)
智能仪器设计基础 (王祁) 硬件架构艺术:数字电路的设计方法与技术
硬件架构艺术:数字电路的设计方法与技术











 京公网安备 11010802033920号
京公网安备 11010802033920号