引言
随着TI公司32位DSP的普及,32位处理器已经成为控制领域的主流产品,与传统的微处理器相比速度更快、性能更强、资源丰富,更符合发展的脚步。TMS320F28027是一款32位的DSP,具有运算速度快、稳定性高的优点。本文利用TMS320F28027控制两个步进电机,从而使物体在平面内运动,实现物体在平面内可以任意地画指定的曲线和圆等。图1为悬挂系统的模型。

1 系统总体方案的设计
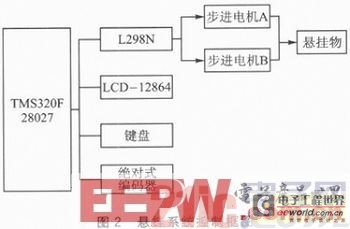
图2为悬挂系统控制框图,以TMS320F28027为控制芯片,利用L298N驱动两个步进电机。步进电机采用42HS4813A4,其额定电流为1.3 A,步距角为1.8°,利用LCD-12864液晶显示被控制物的实时坐标。控制2个步进电机正向、反向转动来达到物体在平面内任意运动的效果。
2 硬件电路设计
2.1 L298N
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。图3为L298N模块的电路原理图。该芯片的主要特点是:工作电压高,其最高工作电压可达46 V;输出电流大,瞬间峰值电流可达3 A,持续工作电流为2 A;内含两个H桥的高电压大电流全桥式驱动器。利用2个L298N来分别控制2个步进电机,步进电机的额定电流为1.3 A,同时通2相时,电流为2.6 A,L298N可以达到42HS4813A4步进电机的电流要求。

2.2 绝对式编码器
绝对式编码器的精度必须要高于步进电机的精度,所以这里采用的是10位绝对式编码器。选用的型号是Minil024J,精度为10位,优点在于采用无接触霍尔检测技术,传感器运行不受灰尘或其他杂物影响,很好克服了基于光学检测原理的缺点。
3 系统软件设计
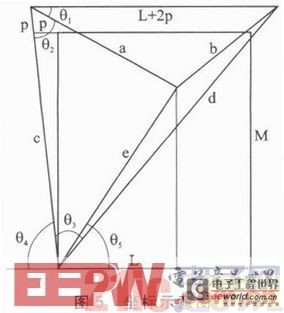
3.1 几何关系1:从任意点移动到任意点算法
坐标示意图如图4所示,有如下的边长和角度关系:



3.2 几何关系2:当前位置坐标显示算法
如图5所示,存在以下的角度和边长关系:

控制代码如下:

3.3 电机位置闭环控制方法
步进电机闭环控制框图如图6所示,TMS320F28027分别用2个定时器来控制两个电机,用绝对式编码器对位置进行监控,进行失步补偿,保证位置正确,并且可以使曲线圆滑。

步进电机的型号为42HS4813A4,为了防止失步,步进电机每步的最小间隔为4 ms,并且用软件对步进电机进行了十六细分,即每步的间距为0.45°。控制电机部分的程序流程图如图7所示。

控制代码如下:
newsf_motorl_SpeedAndSpace_access((int)flag_motorl_paces,flag_cputimer_1,2); //定时器1控制步进电机1
newsf_motor2_SpeedAndSpace_acccss((int)flag_motor2 paces,flag_cputimer_2,2); //定时器2控制步进电机2
3.4 画图算法
利用几何关系任意点到任意点的算法,分别给处理器一连串的位置坐标,控制物体的运动轨迹,如图8所示。

相同间隔取N个点,分别输入处理器,来控制物体的坐标。将取的点传递给TMS320F28027时,为了让圆足够的平滑,消去锯齿状,所以在圆上取了200个点。控制代码如下所示:
4 系统测试
系统完成后,进行了两项测试,分别是画圆运动和运动到指定点。
其中画圆运动测试是在输入圆心坐标以及半径后,对实际画出圆的直径与理论直径作了对比,并且记录了画圆的耗时。此测试中,圆心坐标为(40.0cm,40.0cm),输入的半径值为30.0cm,测试结果如表1所列。

其中,运动到指定点测试是以坐标原点为起始点,在输入指定坐标之后,对原点到指定点距离的理论值和实际值作了对比,并且记录了运动完后回到原点的误差距离,即是否能准确回到原点。在此测试中,运动的原点坐标为(0cm,0cm),目标坐标为(49.0 cm,50.0 cm),即距离原点为70.0cm,实际测试时,运动到(49.1 cm,49.2 cm),即距离原点69.5 cm,测试结果如表2所列。

由测试结果可看出,该系统具有高效、稳定、准确的优点,符合实验预期。
关键字:DSP L298N 步进电机
引用地址:
基于DSP和L298N的悬挂运动控制系统设计
推荐阅读最新更新时间:2024-05-02 23:06
89C2051驱动步进电机的电路和源码,Stepper motor driver
程序 stepper.c stepper.hex /* * STEPPER.C * sweeping stepper's rotor cw and cww 400 steps * Copyright (c) 1999 by W.Sirichote */ #include c:mc518051io.h /* include i/o header file */ #include c:mc518051reg.h register unsigned char j,flag1,temp; register unsigned int cw_n,ccw_n; unsigned char step ={0x80,0xc0,0x40,0x
[单片机]

一种基于DSP的网络通信接口设计
DSP芯片是专门为实现各种数字信号处理算法而设计的、具有特殊结构的微处理器,其卓越的性能、不断上升的性价比、日渐完善的开发方式使它的应用越来越广泛。将计算机网络技术引入以DSP为核心的嵌入式系统,使其成为数字化、网络化相结合,集通信、计算机和视听功能于一体的电子产品,必须大大提升DSP系统的应用价值和市场前景。将DSP技术与网络技术相结合,必须解决两个关键问题:一是实现DSP与网卡的硬件接口技术,二是基于DSP的网络通信程序设计。DSP与网卡的硬件接口技术参考文献 有比较详尽的论述,以下主要讨论基于DSP的网络通信程序设计。 1 通信协议的制定 协议是用来管理通信的法规,是网络系统功能实现的基础。由于DSP可以实现对网卡的直接操作
[嵌入式]
蓝眼科技影音编码传输器BE-4212S采用TI DSP
蓝眼科技2014年强力推荐BE-4212S多功能智能型影音编码传输器,采用美国德州仪器(Texas Instruments)原装进口高阶图像处理DSP芯片,影像运算能力强大,具有智能型多区域移动侦测(VMD)功能,任何移动物体都难逃法眼。BE-4212S支持ONVIF全球性开放接口标准,提供H.264、MPEG-4、MJPEG三种影像压缩格式选择,用户可针对不同的环境自由调整影像质量。低至摄氏零下10度的严寒气候或高达摄氏50度炙热酷暑的环境中都能运作正常,且为了提供最佳浏览的数字质量影像,最大分辨率高达960x576(960H)像素,符合监控市场高画质、稳固耐用、不易当机的高标准需求,帮助您将传统监视系统瞬间转变成数字高画质系
[嵌入式]
基于DSP的无刷直流电机控制系统的研究与设计
引言 近几年来,随着电力电子器件和现代控制理论的迅速发展,无刷直流电动机由于没有接触式换向装置,不存在换向引起的火花,其具有效率高,转速不受机械换向所限制,可维护性强,安全性高等诸多优点,而被人们广泛应用于光驱、智能机器人、电动交通工具等领域。DSP(数字信号处理器)则以其高速的数据处理能力、丰富的内部资源、集成度高和功耗低等特点,已广泛应用在控制领域中。本文提出了一种基于DSP的无刷直流电机控制系统的设计方案。该设计结合模糊控制方法来实现无刷直流电动机的智能化控制。 1 无刷直流电机的数学模型 根据物理学公式,单根导体在磁场中切割磁力线运动时,所产生的电动势e为: 式中,B为磁场感应强度,l为磁场中导体的有效
[工业控制]
什么是步进电机?简单的步进电机驱动调试
1.背景 收拾东西发现一个步进电机(应该是之前从摄像头拆下来的,42步进电机),驱动一下试试。简单记录一下,内容比较简单,欢迎大家指正。 2.硬件 都是用手边有的材料: 控制板用ART-Pi; 驱动板L298N模块; 电源DC12V; 3.原理 3.1 什么是步进电机 步进电机是将电脉冲信号,转变为角位移或线位移的开环控制电机,又称为脉冲电机。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。当步进驱动器接收到一个脉冲信号时,它就可以驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”。 步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准
[嵌入式]
DSP和FPGA构成的3/3相双绕组感应发电机励磁控制系统
摘要:介绍了针对3/3相双绕组感应发电机设计的励磁系统,该系统由DSP和FPGA构成。给出了控制系统的接口电路和实验结果。
关键词:DSP FPGA 3/3相双绕组感应发电机
1 系统简介
3/3相双绕组感应发电机带有两个绕组:励磁补偿绕组和功率绕组,如图1所示。励磁补偿绕组上接一个电力电子变换装置,用来提供感应发电机需要的无功功率,使功率绕组上输出一个稳定的直流电压。
图1中各参数的含义如下:
isa,isb,isc——补偿绕组中的励磁电流;
usa,usb,usc——补偿绕组相电压;
ipa,ipb,ipc——功率绕组电流;
upa,upb,upc——功率绕组相电压;
udc——二极管整流桥直流侧输
[应用]
“一帧影像,动用两块芯片”,OPPO Find X5 Pro为何要如此劳师动众?
手机ISP这个赛道越来越热闹了,此前除了联发科和高通等手机厂商之外,鲜有其他公司涉足这一产品。而在2021年,包括OPPO、小米以及VIVO都陆续推出自己的“ISP”类芯片,而华为海思则是于近期推出了应用于物联网智能终端的ISP。 影像计算也需要DSA 为什么大家都瞄准ISP这一风口?此前,OPPO芯片产品高级总监姜波曾在马里亚纳X的发布会时表示,影像将成为手机重要差异化的特性,而马里亚纳X正是OPPO“ 计算影像探索的第一步 ”。 摩尔定律的发展至今,无论是对PC、服务器还是手机而言,常规处理器在功耗、算力等各方面已经遇到了不少瓶颈,于是DSA架构开始变得愈发流行(DSA,即针对应用领域做优化的处理器架构,区别于通
[手机便携]
深度解析步进电机、伺服电机与机器人运动控制
作者 | Frank Lamb
运动控制和的故障排除和维护需要对和机器人中的所有组件和机制有深刻的了解。
运动控制涉及使用电机对执行器进行定位和精确移动。虽然运动控制并不总是闭环控制,但它不同于,后者的主要目标是实现并验证已知位置或运动。
01
的原理和维护
步进电机是一种无刷直流电机,其定子由多个围绕齿轮状转子排列而成。排列的磁体被分为不同的组,这就是相。每相同时通电,使电机“步进”到下一个位置。
基于的按适当的顺序激活驱动。典型的步进电机分辨率为每转200步,但使用“微步进”,可以实现每转1600步。步进驱动器有时也被称为“斩波器”。
步进电机通常在没有反馈设
[机器人]
















 学习OpenCV 3(中文版) ([美] 安德里安·凯勒,[美] 加里·布拉德斯)
学习OpenCV 3(中文版) ([美] 安德里安·凯勒,[美] 加里·布拉德斯) 控制系统计算机辅助设计 — MATLAB语言与应用
控制系统计算机辅助设计 — MATLAB语言与应用










 京公网安备 11010802033920号
京公网安备 11010802033920号