摘要:对实施被动无源测向定位的主要工具之一的相位干涉仪进行了较为详细和系统的研究,给出了一维相位干涉仪的基本关系式,分析了五通道相位干涉仪测向定位算法及其性能指标?熏对解相位模糊问题进行了探讨。最后,在高速浮点数字信号处理器TMS320C6711系统上实现了五通道相位干涉仪测向定位算法,达到了性能指标及实时实现。
关键词:相位干涉仪 测向定位 相位模糊 定位误差 实时处理
相位干涉仪测向技术广泛应用于天文、雷达、声纳等领域。将干涉仪原理用于无线电测向始于上世纪五十年代和六十年代,随着数字信号处理器的出现,通过数字信号处理器来实现高精度实时测向成为可能。
本文在对一维和二维相位干涉仪进行研究的基础上给出了五通道相位干涉仪的基本关系式,分析了测向精度,并对解相位模糊问题和信道校正问题进行了探讨。采用多基线五元圆形天线阵列为模型,由天线阵列接收到的信号求解出五元天线阵列的互相关信号,并由此提取测向所需的方位信息。本文以五通道相位干涉仪硬件实现为目标,采用高速浮点数字信号处理芯片TMS320C6711进行测向处理。
 1 相位干涉仪测向原理
1.1 一维相位干涉仪测向原理
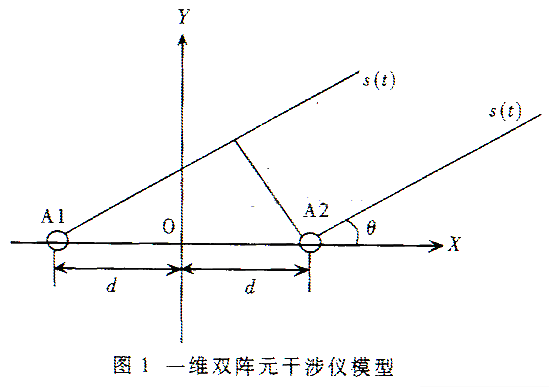
图1所示为一个最简单的一维双阵元干涉仪模型。图中,间隔为d(d称为基线)的两根天线A1和A2所接收的远场辐射信号之间的相位差为:
φ=(4πd/λ)cosθ (1)
式(1)中,λ为接收电磁波的波长。因此,只要测量出φ,就能算出辐射源的到达方向θ:
θ=arccos(φλ/4πd) (2)
1.2 测向误差的分析
在实际系统中,两根天线A1和A2接收的信号为:
xi(t)=s(t)exp[(-1)jj2πd/λcosθ]+ni(t),i=1,2 (3)
其中,ni代表对应阵元i接收的噪声,两阵元的噪声统计相互独立,且与信号统计独立。
1 相位干涉仪测向原理
1.1 一维相位干涉仪测向原理
图1所示为一个最简单的一维双阵元干涉仪模型。图中,间隔为d(d称为基线)的两根天线A1和A2所接收的远场辐射信号之间的相位差为:
φ=(4πd/λ)cosθ (1)
式(1)中,λ为接收电磁波的波长。因此,只要测量出φ,就能算出辐射源的到达方向θ:
θ=arccos(φλ/4πd) (2)
1.2 测向误差的分析
在实际系统中,两根天线A1和A2接收的信号为:
xi(t)=s(t)exp[(-1)jj2πd/λcosθ]+ni(t),i=1,2 (3)
其中,ni代表对应阵元i接收的噪声,两阵元的噪声统计相互独立,且与信号统计独立。
 两个阵元接收信号的互相关为:
r=E{x1(t)x2*(t)}=Psexp(j4πd/λcosθ) (4)
式中,E代表数学期望运算,“*”代表复共轭运算,Ps代表信号功率,相关以后噪声得到抑制。
由(4)式有:
θ=arccos[(λ/4πd)arg(r21)+kλ/2d (5)
式中,arccos表示反余弦函数,arg代表复数取幅角运算,区间为[-π,π]。k为整数,且满足:
-2d/λ-arg(r21)/2π≤k≤2d/λ-arg(r21)/2π (6)
在(6)式中,当d/λ>0.5时,k的取值不唯一,θ有多个解,由此产生测向模糊。
对(5)式求导,有:
|Δθ|=λ/4πd|sinθ|Δarg(r21) (7)
由(7)式可以得出以下结论:sinθ越大,即方位角与干涉仪法线方向的夹角越小,测向精度越高;反之,测向精度降低,直至测向无效。当θ=%26;#177;90%26;#176;(即信号从干涉仪法线方向入射)时,精度最高;θ=0%26;#176;或180%26;#176;(即信号从干涉仪基线方向入射)时, 接收信号互相关的幅角arg(r21)反映不出方位角的变化,测向无效。但单基线干涉仪不能同时测量俯仰角和方位角,此时至少需要另一条独立基线的干涉仪对测得的数据联合求解。
1.3 二维干涉仪测向原理及去模糊处理
1.3.1 多基线五元圆形天线模型
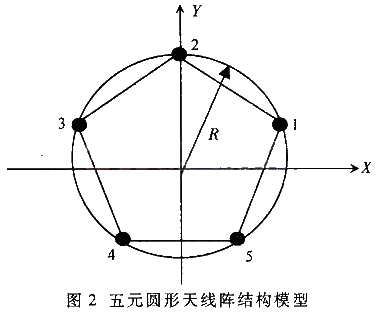
五通道相位干涉仪采用宽口径、多基线的五元圆形天线阵,五边形的五个阵元均匀分布在半径为R的圆上,五个阵源分别为1、2、3、4、5,如图2所示。天线阵平面与地面平行,测得的方位角θ为以天线到地面的垂足为原点,目标在地面上的方位角。测得的俯仰角φ对应于目标到原点的距离(俯仰角0%26;#176;对应原点)。
两个阵元接收信号之间的互相关为:
ri,j+1=E{xi(t)x*i+1(t)}=GiGi+1Psexp{j2π(R/λ)sinφ?[cos(θ+54%26;#176;-72%26;#176;i)-cos(θ-18%26;#176;-72%26;#176;i)]}
i=1~5,定义r56=r51
方位角θ和俯仰角φ的具体计算如下:
Q ri,i+1的幅角为αi,i+1=arg(ri,i+1)+2k2π=4π(R/λ)cos54%26;#176;sinφcos(θ+108%26;#176;-72%26;#176;i)
ri+3,i+4的幅角为αi+3,i+4=arg(ri+3,i+4)+2k1π=4π(R/λ)cos54%26;#176;sinφcos(θ-108%26;#176;-72%26;#176;i)
∴θ=atan2[αi+3,i+4-αi,i+1)csc108%26;#176;,(αi+3,i+4+αi,i+1)sec108%26;#176;]+72%26;#176;i (8)
两个阵元接收信号的互相关为:
r=E{x1(t)x2*(t)}=Psexp(j4πd/λcosθ) (4)
式中,E代表数学期望运算,“*”代表复共轭运算,Ps代表信号功率,相关以后噪声得到抑制。
由(4)式有:
θ=arccos[(λ/4πd)arg(r21)+kλ/2d (5)
式中,arccos表示反余弦函数,arg代表复数取幅角运算,区间为[-π,π]。k为整数,且满足:
-2d/λ-arg(r21)/2π≤k≤2d/λ-arg(r21)/2π (6)
在(6)式中,当d/λ>0.5时,k的取值不唯一,θ有多个解,由此产生测向模糊。
对(5)式求导,有:
|Δθ|=λ/4πd|sinθ|Δarg(r21) (7)
由(7)式可以得出以下结论:sinθ越大,即方位角与干涉仪法线方向的夹角越小,测向精度越高;反之,测向精度降低,直至测向无效。当θ=%26;#177;90%26;#176;(即信号从干涉仪法线方向入射)时,精度最高;θ=0%26;#176;或180%26;#176;(即信号从干涉仪基线方向入射)时, 接收信号互相关的幅角arg(r21)反映不出方位角的变化,测向无效。但单基线干涉仪不能同时测量俯仰角和方位角,此时至少需要另一条独立基线的干涉仪对测得的数据联合求解。
1.3 二维干涉仪测向原理及去模糊处理
1.3.1 多基线五元圆形天线模型
五通道相位干涉仪采用宽口径、多基线的五元圆形天线阵,五边形的五个阵元均匀分布在半径为R的圆上,五个阵源分别为1、2、3、4、5,如图2所示。天线阵平面与地面平行,测得的方位角θ为以天线到地面的垂足为原点,目标在地面上的方位角。测得的俯仰角φ对应于目标到原点的距离(俯仰角0%26;#176;对应原点)。
两个阵元接收信号之间的互相关为:
ri,j+1=E{xi(t)x*i+1(t)}=GiGi+1Psexp{j2π(R/λ)sinφ?[cos(θ+54%26;#176;-72%26;#176;i)-cos(θ-18%26;#176;-72%26;#176;i)]}
i=1~5,定义r56=r51
方位角θ和俯仰角φ的具体计算如下:
Q ri,i+1的幅角为αi,i+1=arg(ri,i+1)+2k2π=4π(R/λ)cos54%26;#176;sinφcos(θ+108%26;#176;-72%26;#176;i)
ri+3,i+4的幅角为αi+3,i+4=arg(ri+3,i+4)+2k1π=4π(R/λ)cos54%26;#176;sinφcos(θ-108%26;#176;-72%26;#176;i)
∴θ=atan2[αi+3,i+4-αi,i+1)csc108%26;#176;,(αi+3,i+4+αi,i+1)sec108%26;#176;]+72%26;#176;i (8)
 式中,i=1~5,令r56=r51、r67=r12、r78=r23、r89=r34;atan2(y,x)代表四象限求反正切函数;arcsin代表反正弦函数。k1、k2为整数,且满足:
(4R/λ)sinφcos54%26;#176;sin108%26;#176;-[arg(ri+3,i+4)-arg(ri,i+1)]/2π≤k1-k2≤(4R/λ)sinφcos54%26;#176;sin108%26;#176;-[arg(ri+3,i+4)-arg(ri,i+1)]/2π (10)
(4R/λ)sinφcos54%26;#176;cos108%26;#176;-[arg(ri+3,i+4)-arg(ri,i+1)]/2π≤k1+k2≤(4R/λ)sinφcos54%26;#176;cos108%26;#176;-[arg(ri+3,i+4)-arg(ri,i+1)]/2π (11)
在课题给定的条件下?熏最大俯仰角为60%26;#176;。在俯仰角大于28%26;#176;的情况下,可能出现模糊。
1.3.2 去模糊处理
为了消除测向模糊,采用多组基线测向,各组基线得出的解的交集即为真实方向。对于本文研究的多基线五元圆形天线阵,当有信号入射时,每组基线均可得到一组测量值。设为:
(34,51):(θ11,φ11)、(θ12,φ12)…
(12,34):(θ21,φ21)、(θ22,φ22)…
(45,12):(θ31,φ31)、(θ32,φ32)…
(23,45):(θ41,φ41)、(θ42,φ42)…
(51,23):(θ51,φ51)、(θ52,φ52)…
以上五组值中,只有真实方向才会每次都出现。取五组值中数值最相近的一对角度,即可得到真实方向。
式中,i=1~5,令r56=r51、r67=r12、r78=r23、r89=r34;atan2(y,x)代表四象限求反正切函数;arcsin代表反正弦函数。k1、k2为整数,且满足:
(4R/λ)sinφcos54%26;#176;sin108%26;#176;-[arg(ri+3,i+4)-arg(ri,i+1)]/2π≤k1-k2≤(4R/λ)sinφcos54%26;#176;sin108%26;#176;-[arg(ri+3,i+4)-arg(ri,i+1)]/2π (10)
(4R/λ)sinφcos54%26;#176;cos108%26;#176;-[arg(ri+3,i+4)-arg(ri,i+1)]/2π≤k1+k2≤(4R/λ)sinφcos54%26;#176;cos108%26;#176;-[arg(ri+3,i+4)-arg(ri,i+1)]/2π (11)
在课题给定的条件下?熏最大俯仰角为60%26;#176;。在俯仰角大于28%26;#176;的情况下,可能出现模糊。
1.3.2 去模糊处理
为了消除测向模糊,采用多组基线测向,各组基线得出的解的交集即为真实方向。对于本文研究的多基线五元圆形天线阵,当有信号入射时,每组基线均可得到一组测量值。设为:
(34,51):(θ11,φ11)、(θ12,φ12)…
(12,34):(θ21,φ21)、(θ22,φ22)…
(45,12):(θ31,φ31)、(θ32,φ32)…
(23,45):(θ41,φ41)、(θ42,φ42)…
(51,23):(θ51,φ51)、(θ52,φ52)…
以上五组值中,只有真实方向才会每次都出现。取五组值中数值最相近的一对角度,即可得到真实方向。
 2 测向算法的硬件调试及仿真
由于需要对五通道输入信号做相关运算和角度运算,计算量大且多为浮点运算。这里采用TMS320C6711芯片为核心组成硬件系统数字信号处理单元,并在该硬件系统上完成了五通道相位干涉仪算法仿真研究。
2.1 TMS320C6711和TDS510USB-E的特点
TMS320C6711是TI公司于1997年推出的DSP芯片。C6711片内有8个并行处理单元,分相同的两组,C6711的体系结构采用VLIW结构,单指令字长为32bit,8个指令组成一个指令包。芯片内部设置了专门的指令分配模块,可以将每个256bits指令包同时分配到8个处理单元,并由8个单元同时运行。芯片内部时钟频率可以达到150MHz,芯片最大处理能力可达到1200MIPS。
TDS510USB-E是以TMS320C6000为核心的硬件调试系统。仿真器为USB2.0接口设备。
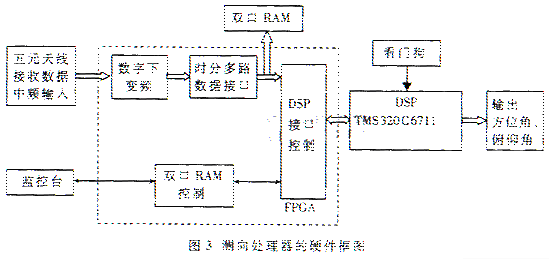
2.2 测向处理器硬件设计
测向处理器硬件框图如图3所示。
数字下变频单元输入5通道接收机接收的信号,并去掉载波的零中频I、Q信号(5通道共10路I、Q信号)。
2 测向算法的硬件调试及仿真
由于需要对五通道输入信号做相关运算和角度运算,计算量大且多为浮点运算。这里采用TMS320C6711芯片为核心组成硬件系统数字信号处理单元,并在该硬件系统上完成了五通道相位干涉仪算法仿真研究。
2.1 TMS320C6711和TDS510USB-E的特点
TMS320C6711是TI公司于1997年推出的DSP芯片。C6711片内有8个并行处理单元,分相同的两组,C6711的体系结构采用VLIW结构,单指令字长为32bit,8个指令组成一个指令包。芯片内部设置了专门的指令分配模块,可以将每个256bits指令包同时分配到8个处理单元,并由8个单元同时运行。芯片内部时钟频率可以达到150MHz,芯片最大处理能力可达到1200MIPS。
TDS510USB-E是以TMS320C6000为核心的硬件调试系统。仿真器为USB2.0接口设备。
2.2 测向处理器硬件设计
测向处理器硬件框图如图3所示。
数字下变频单元输入5通道接收机接收的信号,并去掉载波的零中频I、Q信号(5通道共10路I、Q信号)。
 FPGA包括数字下变频单元、时分多路数据接口、DSP的EMIF接口控制及双口RAM控制四大模块。
双口RAM存储测向处理所需数据,考虑到DSP中测向算法所需要的内存容量,因此其不少于10K。
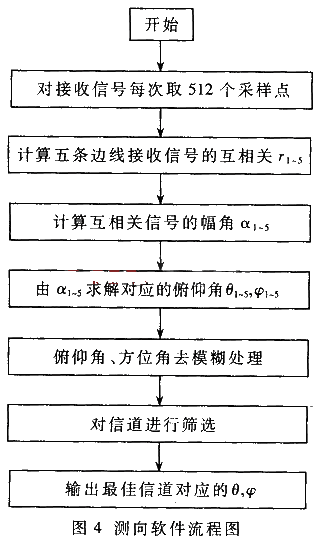
2.3 测向算法软件的实现
CCS是TI的集成性DSPs软件开发工具。在一个开放式的插件结构下,CCS内部集成了C6000代码产生工具、软件模拟器、实时基础软件DSP/BIOS等软件工具。在CCS下,开发者可以对软件进行编辑、编译、调试、代码性能测试和项目管理等所有工作。选择C语言作为应用程序的设计,是因为C6000中采用优化ANSI C编译器,它的输入是C语言源代码,输出为TMS320汇编代码。即将符合ANSI标准的C代码转换为目标DSPs的汇编代码,一般的算法可采用C代码实时实现。
五通道干涉仪测向算法软件流程图如图4所示。
2.4 五通道相位干涉仪算法的硬件调试及仿真结果
在透彻分析五通道相位干涉仪算法原理的基础上?熏依据软件工程的原则规范?熏采用C语言设计出了五通道相位干涉仪算法的软件?熏然后在PC机上用C6711的C编译器编译、汇编、链接了软件的C源代码?熏最后将软件加载到目标板上进行运行、调试。
2.4.1 测向处理器中数据的来源
五通道送入TMS320C6711的数据由科学计算语言Matlab6.2在WINDOWS2000操作平台上仿真得出,即采用模拟QPSK信号,调制速率为9600bps,噪声是 Matlab6.2内部函数randn产生的高斯白噪声,并用Hilbert变换将其变换为复噪声。
采样信号长度:512点
信噪比:5dB、10dB
仿真频点:1800MHz
2.4.2 硬件调试结果
表1、表2、表3分别列出了几种情况下待测俯仰角和方位角与CCS中得到的俯仰角和方位角的对比。其中,phai、theta分别表示待测俯仰角与方位角,phai测量值和theta测量值是由运行CCS2.1中的测向程序得到的。
表1 未加入噪声时,待测俯仰角和方位角与CCS中得到的俯仰角和方位角的对比
phai
6
12
18
24
30
36
42
48
54
theta
42
78
114
180
216
252
288
324
359
phai测量值
6
12
18
24
29.972
36
42.00001
48
54.17088
theta测量值
42.00001
78
114
180
216
252
288
324
359.1306
表2 SNR=10时,待测俯仰角和方位角与CCS中得到的俯仰角和方位角的对比
phai
6
12
18
24
30
36
42
48
54
theta
42
78
114
180
216
252
288
324
359
phai测量值
6.088115
11.8544
17.91585
23.83722
29.90064
36.03776
41.97448
47.89545
53.72695
theta测量值
42.09026
78.10439
114.0959
179.8849
215.9012
252.3681
288.0671
323.9636
359.1507
表3 SNR=5时,待测俯仰角和方位角与CCS中得到的俯仰角和方位角的对比
phai
6
12
18
24
30
36
42
48
54
theta
42
78
114
180
216
252
288
324
359
phai测量值
6.19272
12.1703
18.1785
24.0524
29.9029
35.853
42.1253
48.12672
53.1605
theta测量值
39.9314
78.2968
112.754
180.254
216.337
251.5699
287.7
324.3568
358.944
运行结果表明,五通道相位干涉仪测向信号处理的硬件实现是可行的。当俯仰角大于28%26;#176;时,用前面所述的去模糊方法,可以完全消除由于模糊带来的角度不确定问题。当仿真数据中不加入噪声时,该硬件系统的输出结果与真实值基本吻合。信噪比对测向性能的影响较大。
在CCS2.1环境中,采用尽可能优化的干涉仪法测向定位程序,用CCS2.1提供的记时工具CLOCK测量执行时间,从仿真数据输入到确定出信号方向的时间约为7ms,基本达到了实时信号处理的要求。
以上所做的硬件调试是在用仿真语言MATLAB对五通道相位干涉仪测向算法在天线误差、信道幅度及相位误差存在的条件下进行仿真验证的基础上进行的,在硬件调试中侧重对测向算法的验证。硬件调试运行结果表明五通道相位干涉仪具有噪声可抑制、灵敏度高、线性范围大、测向响应时间快等优点,这些优点使得单信号环境下的相位干涉仪测向机制更具有优势。同时,五通道相位干涉仪算法的硬件实现也为工程上实现新一代电子测向系统打下了坚实的基础。
FPGA包括数字下变频单元、时分多路数据接口、DSP的EMIF接口控制及双口RAM控制四大模块。
双口RAM存储测向处理所需数据,考虑到DSP中测向算法所需要的内存容量,因此其不少于10K。
2.3 测向算法软件的实现
CCS是TI的集成性DSPs软件开发工具。在一个开放式的插件结构下,CCS内部集成了C6000代码产生工具、软件模拟器、实时基础软件DSP/BIOS等软件工具。在CCS下,开发者可以对软件进行编辑、编译、调试、代码性能测试和项目管理等所有工作。选择C语言作为应用程序的设计,是因为C6000中采用优化ANSI C编译器,它的输入是C语言源代码,输出为TMS320汇编代码。即将符合ANSI标准的C代码转换为目标DSPs的汇编代码,一般的算法可采用C代码实时实现。
五通道干涉仪测向算法软件流程图如图4所示。
2.4 五通道相位干涉仪算法的硬件调试及仿真结果
在透彻分析五通道相位干涉仪算法原理的基础上?熏依据软件工程的原则规范?熏采用C语言设计出了五通道相位干涉仪算法的软件?熏然后在PC机上用C6711的C编译器编译、汇编、链接了软件的C源代码?熏最后将软件加载到目标板上进行运行、调试。
2.4.1 测向处理器中数据的来源
五通道送入TMS320C6711的数据由科学计算语言Matlab6.2在WINDOWS2000操作平台上仿真得出,即采用模拟QPSK信号,调制速率为9600bps,噪声是 Matlab6.2内部函数randn产生的高斯白噪声,并用Hilbert变换将其变换为复噪声。
采样信号长度:512点
信噪比:5dB、10dB
仿真频点:1800MHz
2.4.2 硬件调试结果
表1、表2、表3分别列出了几种情况下待测俯仰角和方位角与CCS中得到的俯仰角和方位角的对比。其中,phai、theta分别表示待测俯仰角与方位角,phai测量值和theta测量值是由运行CCS2.1中的测向程序得到的。
表1 未加入噪声时,待测俯仰角和方位角与CCS中得到的俯仰角和方位角的对比
phai
6
12
18
24
30
36
42
48
54
theta
42
78
114
180
216
252
288
324
359
phai测量值
6
12
18
24
29.972
36
42.00001
48
54.17088
theta测量值
42.00001
78
114
180
216
252
288
324
359.1306
表2 SNR=10时,待测俯仰角和方位角与CCS中得到的俯仰角和方位角的对比
phai
6
12
18
24
30
36
42
48
54
theta
42
78
114
180
216
252
288
324
359
phai测量值
6.088115
11.8544
17.91585
23.83722
29.90064
36.03776
41.97448
47.89545
53.72695
theta测量值
42.09026
78.10439
114.0959
179.8849
215.9012
252.3681
288.0671
323.9636
359.1507
表3 SNR=5时,待测俯仰角和方位角与CCS中得到的俯仰角和方位角的对比
phai
6
12
18
24
30
36
42
48
54
theta
42
78
114
180
216
252
288
324
359
phai测量值
6.19272
12.1703
18.1785
24.0524
29.9029
35.853
42.1253
48.12672
53.1605
theta测量值
39.9314
78.2968
112.754
180.254
216.337
251.5699
287.7
324.3568
358.944
运行结果表明,五通道相位干涉仪测向信号处理的硬件实现是可行的。当俯仰角大于28%26;#176;时,用前面所述的去模糊方法,可以完全消除由于模糊带来的角度不确定问题。当仿真数据中不加入噪声时,该硬件系统的输出结果与真实值基本吻合。信噪比对测向性能的影响较大。
在CCS2.1环境中,采用尽可能优化的干涉仪法测向定位程序,用CCS2.1提供的记时工具CLOCK测量执行时间,从仿真数据输入到确定出信号方向的时间约为7ms,基本达到了实时信号处理的要求。
以上所做的硬件调试是在用仿真语言MATLAB对五通道相位干涉仪测向算法在天线误差、信道幅度及相位误差存在的条件下进行仿真验证的基础上进行的,在硬件调试中侧重对测向算法的验证。硬件调试运行结果表明五通道相位干涉仪具有噪声可抑制、灵敏度高、线性范围大、测向响应时间快等优点,这些优点使得单信号环境下的相位干涉仪测向机制更具有优势。同时,五通道相位干涉仪算法的硬件实现也为工程上实现新一代电子测向系统打下了坚实的基础。
引用地址:相位干涉仪测向算法及其在TMS320C6711上的实现
1 相位干涉仪测向原理
1.1 一维相位干涉仪测向原理
图1所示为一个最简单的一维双阵元干涉仪模型。图中,间隔为d(d称为基线)的两根天线A1和A2所接收的远场辐射信号之间的相位差为:
φ=(4πd/λ)cosθ (1)
式(1)中,λ为接收电磁波的波长。因此,只要测量出φ,就能算出辐射源的到达方向θ:
θ=arccos(φλ/4πd) (2)
1.2 测向误差的分析
在实际系统中,两根天线A1和A2接收的信号为:
xi(t)=s(t)exp[(-1)jj2πd/λcosθ]+ni(t),i=1,2 (3)
其中,ni代表对应阵元i接收的噪声,两阵元的噪声统计相互独立,且与信号统计独立。
两个阵元接收信号的互相关为:
r=E{x1(t)x2*(t)}=Psexp(j4πd/λcosθ) (4)
式中,E代表数学期望运算,“*”代表复共轭运算,Ps代表信号功率,相关以后噪声得到抑制。
由(4)式有:
θ=arccos[(λ/4πd)arg(r21)+kλ/2d (5)
式中,arccos表示反余弦函数,arg代表复数取幅角运算,区间为[-π,π]。k为整数,且满足:
-2d/λ-arg(r21)/2π≤k≤2d/λ-arg(r21)/2π (6)
在(6)式中,当d/λ>0.5时,k的取值不唯一,θ有多个解,由此产生测向模糊。
对(5)式求导,有:
|Δθ|=λ/4πd|sinθ|Δarg(r21) (7)
由(7)式可以得出以下结论:sinθ越大,即方位角与干涉仪法线方向的夹角越小,测向精度越高;反之,测向精度降低,直至测向无效。当θ=%26;#177;90%26;#176;(即信号从干涉仪法线方向入射)时,精度最高;θ=0%26;#176;或180%26;#176;(即信号从干涉仪基线方向入射)时, 接收信号互相关的幅角arg(r21)反映不出方位角的变化,测向无效。但单基线干涉仪不能同时测量俯仰角和方位角,此时至少需要另一条独立基线的干涉仪对测得的数据联合求解。
1.3 二维干涉仪测向原理及去模糊处理
1.3.1 多基线五元圆形天线模型
五通道相位干涉仪采用宽口径、多基线的五元圆形天线阵,五边形的五个阵元均匀分布在半径为R的圆上,五个阵源分别为1、2、3、4、5,如图2所示。天线阵平面与地面平行,测得的方位角θ为以天线到地面的垂足为原点,目标在地面上的方位角。测得的俯仰角φ对应于目标到原点的距离(俯仰角0%26;#176;对应原点)。
两个阵元接收信号之间的互相关为:
ri,j+1=E{xi(t)x*i+1(t)}=GiGi+1Psexp{j2π(R/λ)sinφ?[cos(θ+54%26;#176;-72%26;#176;i)-cos(θ-18%26;#176;-72%26;#176;i)]}
i=1~5,定义r56=r51
方位角θ和俯仰角φ的具体计算如下:
Q ri,i+1的幅角为αi,i+1=arg(ri,i+1)+2k2π=4π(R/λ)cos54%26;#176;sinφcos(θ+108%26;#176;-72%26;#176;i)
ri+3,i+4的幅角为αi+3,i+4=arg(ri+3,i+4)+2k1π=4π(R/λ)cos54%26;#176;sinφcos(θ-108%26;#176;-72%26;#176;i)
∴θ=atan2[αi+3,i+4-αi,i+1)csc108%26;#176;,(αi+3,i+4+αi,i+1)sec108%26;#176;]+72%26;#176;i (8)
式中,i=1~5,令r56=r51、r67=r12、r78=r23、r89=r34;atan2(y,x)代表四象限求反正切函数;arcsin代表反正弦函数。k1、k2为整数,且满足:
(4R/λ)sinφcos54%26;#176;sin108%26;#176;-[arg(ri+3,i+4)-arg(ri,i+1)]/2π≤k1-k2≤(4R/λ)sinφcos54%26;#176;sin108%26;#176;-[arg(ri+3,i+4)-arg(ri,i+1)]/2π (10)
(4R/λ)sinφcos54%26;#176;cos108%26;#176;-[arg(ri+3,i+4)-arg(ri,i+1)]/2π≤k1+k2≤(4R/λ)sinφcos54%26;#176;cos108%26;#176;-[arg(ri+3,i+4)-arg(ri,i+1)]/2π (11)
在课题给定的条件下?熏最大俯仰角为60%26;#176;。在俯仰角大于28%26;#176;的情况下,可能出现模糊。
1.3.2 去模糊处理
为了消除测向模糊,采用多组基线测向,各组基线得出的解的交集即为真实方向。对于本文研究的多基线五元圆形天线阵,当有信号入射时,每组基线均可得到一组测量值。设为:
(34,51):(θ11,φ11)、(θ12,φ12)…
(12,34):(θ21,φ21)、(θ22,φ22)…
(45,12):(θ31,φ31)、(θ32,φ32)…
(23,45):(θ41,φ41)、(θ42,φ42)…
(51,23):(θ51,φ51)、(θ52,φ52)…
以上五组值中,只有真实方向才会每次都出现。取五组值中数值最相近的一对角度,即可得到真实方向。
2 测向算法的硬件调试及仿真
由于需要对五通道输入信号做相关运算和角度运算,计算量大且多为浮点运算。这里采用TMS320C6711芯片为核心组成硬件系统数字信号处理单元,并在该硬件系统上完成了五通道相位干涉仪算法仿真研究。
2.1 TMS320C6711和TDS510USB-E的特点
TMS320C6711是TI公司于1997年推出的DSP芯片。C6711片内有8个并行处理单元,分相同的两组,C6711的体系结构采用VLIW结构,单指令字长为32bit,8个指令组成一个指令包。芯片内部设置了专门的指令分配模块,可以将每个256bits指令包同时分配到8个处理单元,并由8个单元同时运行。芯片内部时钟频率可以达到150MHz,芯片最大处理能力可达到1200MIPS。
TDS510USB-E是以TMS320C6000为核心的硬件调试系统。仿真器为USB2.0接口设备。
2.2 测向处理器硬件设计
测向处理器硬件框图如图3所示。
数字下变频单元输入5通道接收机接收的信号,并去掉载波的零中频I、Q信号(5通道共10路I、Q信号)。
FPGA包括数字下变频单元、时分多路数据接口、DSP的EMIF接口控制及双口RAM控制四大模块。
双口RAM存储测向处理所需数据,考虑到DSP中测向算法所需要的内存容量,因此其不少于10K。
2.3 测向算法软件的实现
CCS是TI的集成性DSPs软件开发工具。在一个开放式的插件结构下,CCS内部集成了C6000代码产生工具、软件模拟器、实时基础软件DSP/BIOS等软件工具。在CCS下,开发者可以对软件进行编辑、编译、调试、代码性能测试和项目管理等所有工作。选择C语言作为应用程序的设计,是因为C6000中采用优化ANSI C编译器,它的输入是C语言源代码,输出为TMS320汇编代码。即将符合ANSI标准的C代码转换为目标DSPs的汇编代码,一般的算法可采用C代码实时实现。
五通道干涉仪测向算法软件流程图如图4所示。
2.4 五通道相位干涉仪算法的硬件调试及仿真结果
在透彻分析五通道相位干涉仪算法原理的基础上?熏依据软件工程的原则规范?熏采用C语言设计出了五通道相位干涉仪算法的软件?熏然后在PC机上用C6711的C编译器编译、汇编、链接了软件的C源代码?熏最后将软件加载到目标板上进行运行、调试。
2.4.1 测向处理器中数据的来源
五通道送入TMS320C6711的数据由科学计算语言Matlab6.2在WINDOWS2000操作平台上仿真得出,即采用模拟QPSK信号,调制速率为9600bps,噪声是 Matlab6.2内部函数randn产生的高斯白噪声,并用Hilbert变换将其变换为复噪声。
采样信号长度:512点
信噪比:5dB、10dB
仿真频点:1800MHz
2.4.2 硬件调试结果
表1、表2、表3分别列出了几种情况下待测俯仰角和方位角与CCS中得到的俯仰角和方位角的对比。其中,phai、theta分别表示待测俯仰角与方位角,phai测量值和theta测量值是由运行CCS2.1中的测向程序得到的。
表1 未加入噪声时,待测俯仰角和方位角与CCS中得到的俯仰角和方位角的对比
phai
6
12
18
24
30
36
42
48
54
theta
42
78
114
180
216
252
288
324
359
phai测量值
6
12
18
24
29.972
36
42.00001
48
54.17088
theta测量值
42.00001
78
114
180
216
252
288
324
359.1306
表2 SNR=10时,待测俯仰角和方位角与CCS中得到的俯仰角和方位角的对比
phai
6
12
18
24
30
36
42
48
54
theta
42
78
114
180
216
252
288
324
359
phai测量值
6.088115
11.8544
17.91585
23.83722
29.90064
36.03776
41.97448
47.89545
53.72695
theta测量值
42.09026
78.10439
114.0959
179.8849
215.9012
252.3681
288.0671
323.9636
359.1507
表3 SNR=5时,待测俯仰角和方位角与CCS中得到的俯仰角和方位角的对比
phai
6
12
18
24
30
36
42
48
54
theta
42
78
114
180
216
252
288
324
359
phai测量值
6.19272
12.1703
18.1785
24.0524
29.9029
35.853
42.1253
48.12672
53.1605
theta测量值
39.9314
78.2968
112.754
180.254
216.337
251.5699
287.7
324.3568
358.944
运行结果表明,五通道相位干涉仪测向信号处理的硬件实现是可行的。当俯仰角大于28%26;#176;时,用前面所述的去模糊方法,可以完全消除由于模糊带来的角度不确定问题。当仿真数据中不加入噪声时,该硬件系统的输出结果与真实值基本吻合。信噪比对测向性能的影响较大。
在CCS2.1环境中,采用尽可能优化的干涉仪法测向定位程序,用CCS2.1提供的记时工具CLOCK测量执行时间,从仿真数据输入到确定出信号方向的时间约为7ms,基本达到了实时信号处理的要求。
以上所做的硬件调试是在用仿真语言MATLAB对五通道相位干涉仪测向算法在天线误差、信道幅度及相位误差存在的条件下进行仿真验证的基础上进行的,在硬件调试中侧重对测向算法的验证。硬件调试运行结果表明五通道相位干涉仪具有噪声可抑制、灵敏度高、线性范围大、测向响应时间快等优点,这些优点使得单信号环境下的相位干涉仪测向机制更具有优势。同时,五通道相位干涉仪算法的硬件实现也为工程上实现新一代电子测向系统打下了坚实的基础。
上一篇:多制式语音编码及其DSP实现
下一篇:多制式语音编码及其DSP实现
 Electric Motor Control: DC, AC, and BLDC Motors
Electric Motor Control: DC, AC, and BLDC Motors LM111J
LM111J
最新嵌入式文章

更多精选电路图






更多热门文章
更多每日新闻
更多往期活动
11月28日历史上的今天
厂商技术中心




 京公网安备 11010802033920号
京公网安备 11010802033920号