近年来,高亮度LED照明以高光效、长寿命、高可靠性和无污染等优点正在逐步取代白炽灯、荧光灯等传统光源。在一些应用中,希望在某些情况下可调节灯光的亮度,以便进一步节能和提供舒适的照明。常见的调光有双向可控硅调光、后沿调光、ON/OFF调光、遥控调光等。可控硅调光器在传统的白炽灯等调光照明应用已久,且不用改变接线,装置成本较低,各品牌可控硅调光器的性能和规格相差不大,但是其直接应用在LED驱动场合还存在着一系列问题。
1 双向可控硅TRIAC调光原理
市面上大多数可控硅调光器基本结构如图1所示,其工作原理如下:当交流电压加双向可控硅TRIAC两端时,由于Rt、Ct组成的RC充电电路有一个充电时间,电容上的电压是从0V开始充电的,并且TRIAC的驱动极串联有一个DIAC(双向触发二极管,一般是30V左右),因此TRIAC可靠截止。当Ct上的电压上升到30V时,DIAC触发导通,TRIAC可靠导通,此时TRIAC两端的电压瞬间变为零,Ct通过Rt迅速放电,当Ct电压跌落到30V以下时,DIAC截止,如果TRIAC通过的电流大于其维持电流则继续导通,如果低于其维持电流将会截止。电感L和电容C的作用是减小电流和电压的变化率,以抑制电磁干扰EMI问题。

可控硅前沿调光器若直接用于控制普通的led驱动器,LED灯会产生闪烁,更不能实现宽范围的调光控制。原因归结如下:
(1)可控硅的维持电流问题。目前市面上的可控硅调光器功率等级不同,维持电流一般是7~75mA(驱动电流则是7~100mA),导通后流过可控硅的电流必须要大于这个值才能继续导通,否则会自行关断。
(2)阻抗匹配问题。当可控硅导通后,可控硅和驱动电路的阻抗都发生变化,且驱动电路由于有差模滤波电容的存在,呈容性阻抗,与可控硅调光器存在阻抗匹配的问题,因此在设计电路时一般需要使用较小的差模滤波电容。
(3)冲击电流问题。由于可控硅前沿斩波使得输入电压可能一直处于峰值附近,输入滤波电容将承受大的冲击电流,同时还可能使得可控硅意外截止,导致可控硅不断重启,所以一般需要在驱动器输入端串接电阻来减小冲击。
(4)导通角较小时LED会出现闪烁。当可控硅导通角较小时,由于此时输入电压和电流均较小,导致维持电流不够或者芯片供电Vcc不够,电路停止工作,使LED产生闪烁。
2 一种可控硅调光的LED驱动电源
线性调光存在的问题,即人眼在低亮度情况下对光线的细微变化很敏感;而在较亮时,由于人眼视觉的饱和,光线较大的变化却不易被察觉。并提出了利用单片机编程来实现调光信号和调光输出的非线性关系(如指数、平方等关系)的方法,使得人眼感觉的调光是一个线性平稳过程。
文中设计的电路利用RC充放电电路来实现这一功能。
图2是一种利用普通的脉宽调制PWM芯片结合外围电路来搭建可控硅调光的LED驱动电路框图。维持电流补偿电路通过检测R1端电压(即输入电流)来控制流过维持电流补偿电路的电流。当输入电流较小时,维持电流补偿电路上流过较大的电流;当输入电流较大时,维持电流补偿电路关断,维持电流补偿以恒流源的形式保证可控硅的维持电流。调光控制电路包括比较器、RC充放电电路和增益电路。实验中选用一款旋钮行程和斩波角成正比的可控硅调光器,其最小导通角约为30°。

根据图2中,RC充放电电路的输出经过增益电路后可得电流参考为:

式中k为增益,VC为RC充放电电路的输入电压,τ为RC的时间系数,θ为可控硅的导通角。
则在最小导通角对应的输出为零,即电路输出的最大值对应电流参考的最大值:

从式(1)和式(2)可得输出电流表达式如式(3)所示,输出电流在不同RC时间系数下随可控硅导通角之间的关系如图3a)所示。

在斩波角为θ时,电路对应的输入功率为:

式中Vp为输入电压峰值,Rin为等效输入阻抗。
假设电路的变换效率为η,且电路的输出功率为PO=IO·UO,则可得到电路的等效输入阻抗如式(5)所示。


3 实验及结果
根据以上分析,本文设计一台基于反激变换器的可控硅调光LED驱动器,控制芯片为NCP1607;输入交流电压220V,最大输出功率为25W,最大输出电流为0.7A;以3串(每串10只0.8W的LED灯)相并联作为负载;RC时间系数选择0.5,增益为0.2。电路的实验波形和工作特性曲线如图4所示。


图4a)、b)、c)为可控硅导通角为115°时阻抗匹配开关驱动电压VZ、输入电流Iin、输入电压Vin的波形,电路的输出电流为470mA,功率因数为0.78。从图中可看出,当可控硅导通瞬间,由于驱动器输入端有差模滤波电容导致输入电流有冲击电流尖峰,而当输入电流小于一定值时,阻抗匹配开关开通以保证流过可控硅的电流大于其维持电流。
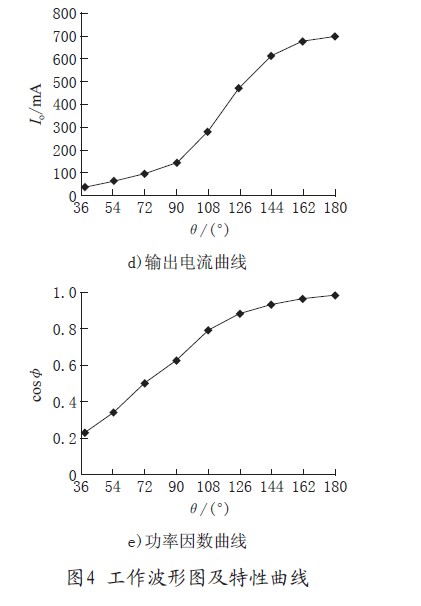
图4d)为可控硅不同导通角对应的输出电流曲线,实际调试中可控硅导通角在150°之后就接近满载输出了。图4e)为可控硅在不同导通角下对应电路的cosφ曲线。
4 结语
本文分析了现有可控硅调光器用于LED驱动时存在的问题,并根据人眼对光线反应非线性的特点,设计了一种利用普通PWM芯片结合外围电路搭建的可控硅非线性调光LED驱动电路,分析了电路在调光过程中的工作特性,实验结果实现0~100%平稳无闪烁调光。
上一篇:工程师分享:数字LED驱动的街道照明系统
下一篇:恒流驱动源在太阳能LED路灯中的应用实例
推荐阅读最新更新时间:2023-10-18 15:33

 开关电源理论及设计 (周洁敏)
开关电源理论及设计 (周洁敏) Verilog HDL数字集成电路设计原理与应用
Verilog HDL数字集成电路设计原理与应用
Vishay线上图书馆
- 选型-汽车级表面贴装和通孔超快整流器
- 你知道吗?DC-LINK电容在高湿条件下具有高度稳定性
- microBUCK和microBRICK直流/直流稳压器解决方案
- SOP-4小型封装光伏MOSFET驱动器VOMDA1271
- 使用薄膜、大功率、背接触式电阻的优势
- SQJQ140E车规级N沟道40V MOSFET











 京公网安备 11010802033920号
京公网安备 11010802033920号